







目录
在嵌入式系统设计中,当系统变得复杂、功能增加时,单片机可能会逐渐逼近其性能极限。及时识别这些极限点对于保证产品质量、稳定性和用户体验至关重要。
当你的嵌入式系统出现以下一个或多个迹象时,可以认为单片机的性能已经达到或接近极限:
- CPU 负载持续 > 80-90%,且系统响应迟缓。
- 可用 RAM 极低,频繁发生
malloc失败或出现栈溢出迹象。 - 关键实时任务错过 Deadline,或响应时间/抖动超出容忍范围。
- 外设数据处理不过来,导致数据丢失或通信错误。
- Flash 空间几乎耗尽,无法添加新功能或进行 OTA。
- 功耗异常高,温度持续接近或超过规格上限。
- 系统稳定性下降,出现不明原因的卡顿、复位或崩溃。
1、CPU 负载
CPU 负载是指 CPU 在单位时间内用于执行任务的时间比例。这是衡量 MCU 繁忙程度最直接的指标。
CPU 负载长时间(例如,几秒或更长)持续在 80% 以上,尤其是在峰值负载时接近 100%。系统对外部事件(如按键、传感器中断)的响应明显变慢。低优先级任务长时间得不到执行机会。
在实时操作系统 (RTOS) 中,通常会有一个最低优先级的空闲任务。通过测量空闲任务获得执行时间的比例,可以反推出 CPU 的负载。最简单的办法,在系统的空闲循环(或 RTOS 的空闲任务)中,让一个 GPIO 引脚输出高电平,在所有其他任务执行时,让该 GPIO 输出低电平。使用示波器或逻辑分析仪观察这个 GPIO 引脚的波形。高电平持续时间占总时间的百分比就是 CPU 的空闲时间百分比。
// 假设 PIN_CPU_LOAD 连接到示波器
#define PIN_CPU_LOAD PA0
void IdleLoop() {
while(1) {
// 进入空闲状态,拉高引脚
SetPinHigh(PIN_CPU_LOAD);
// 短暂延时或等待事件,模拟空闲操作
WaitForEventOrDelay();
// 退出空闲(即使没有任务切换,也模拟检查点)
SetPinLow(PIN_CPU_LOAD);
// 让其他任务有机会运行(如果是非抢占式或协作式)
Yield();
}
}
void Task_A() {
while(1) {
// 任务执行前(或周期性),拉低引脚
SetPinLow(PIN_CPU_LOAD);
// ... 执行任务 A 的代码 ...
TaskDelay(TASK_A_PERIOD);
}
}
void Task_B() {
while(1) {
// 任务执行前(或周期性),拉低引脚
SetPinLow(PIN_CPU_LOAD);
// ... 执行任务 B 的代码 ...
TaskDelay(TASK_B_PERIOD);
}
}
// 在主函数或 RTOS 启动时初始化引脚并启动任务/空闲循环
int main() {
InitializeGPIO(PIN_CPU_LOAD, OUTPUT);
SetPinLow(PIN_CPU_LOAD); // 初始为低
// 如果使用 RTOS
// CreateTask(Task_A);
// CreateTask(Task_B);
// StartScheduler(); // RTOS 会自动处理空闲任务
// 如果是裸机或简单循环
// InitializeOtherThings();
// StartInterrupts();
// IdleLoop(); // 或者是一个包含任务调度逻辑的主循环
return 0;
}
现在许多商业或开源 RTOS 提供了内建的 CPU 负载统计功能,可以直接调用 API 获取。
2、内存使用情况
内存分为 Flash(程序存储)和 RAM(数据存储)。两者耗尽都会导致严重问题。
Flash 使用率接近 100%。这会导致无法添加新功能、无法进行 OTA (Over-the-Air) 升级(因为需要空间存储新固件),甚至无法进行调试(调试信息也占用空间)。
如果可用 RAM 持续很低,系统应对峰值需求(如处理大数据包、复杂算法临时变量)的能力会很差,容易在压力下崩溃。
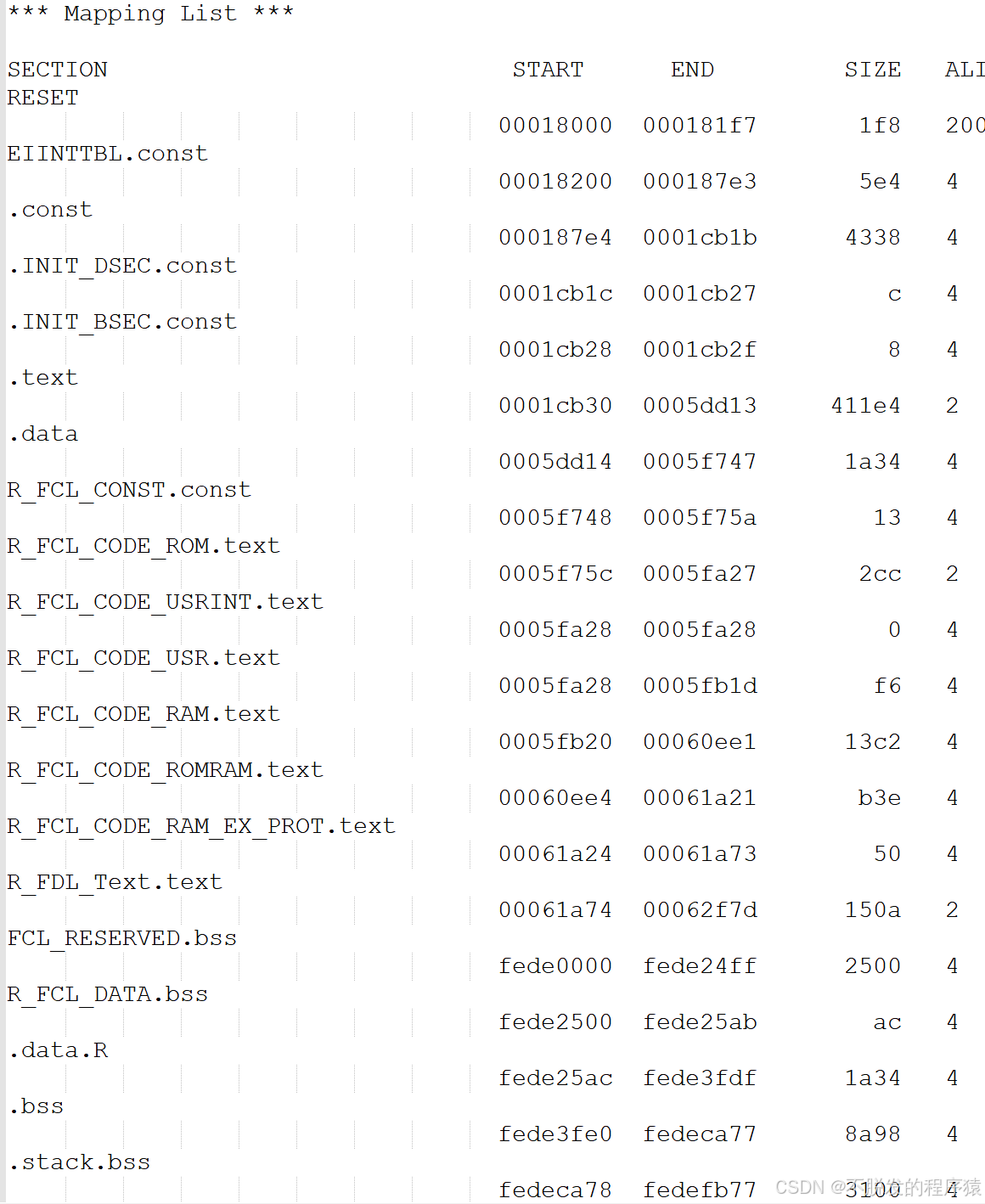
查看编译器/链接器生成的 Map 文件它会详细列出代码段 (.text)、只读数据段 (.rodata) 等占用的 Flash 大小,查看 .data 和 .bss 段的RAM大小。
许多 MCU 和 RTOS 提供了硬件(如 MPU - Memory Protection Unit)或软件(如 Stack Painting/Watermarking)机制来检测栈是否溢出。Stack Painting 是在任务创建时,将其栈空间填充一个特殊值(如 0xCDCDCDCD),然后周期性检查栈底有多少这个值被覆盖了,从而了解栈的最大使用深度。
#define STACK_FILL_PATTERN 0xCDCDCDCD
#define TASK_STACK_SIZE 1024 // Bytes
uint8_t task_stack[TASK_STACK_SIZE];
void InitializeTaskStack(uint8_t* stack_ptr, uint32_t stack_size) {
uint32_t* pStack = (uint32_t*)stack_ptr;
for (uint32_t i = 0; i < stack_size / sizeof(uint32_t); ++i) {
pStack[i] = STACK_FILL_PATTERN;
}
}
// 在任务创建时调用 InitializeTaskStack(task_stack, TASK_STACK_SIZE);
// 周期性检查函数
uint32_t CheckStackHighWaterMark(uint8_t* stack_base, uint32_t stack_size) {
uint32_t* pStack = (uint32_t*)stack_base;
uint32_t unused_words = 0;
// 从栈底向上检查,直到找到第一个非填充值
for (uint32_t i = 0; i < stack_size / sizeof(uint32_t); ++i) {
if (pStack[i] == STACK_FILL_PATTERN) {
unused_words++;
} else {
break; // 已经到达被使用的区域
}
}
uint32_t used_bytes = stack_size - (unused_words * sizeof(uint32_t));
return used_bytes;
}
// 在监控任务或调试时调用
// uint32_t max_stack_usage = CheckStackHighWaterMark(task_stack, TASK_STACK_SIZE);
// printf("Task stack usage: %u bytes\n", max_stack_usage); 3、实时性能
对于需要精确时间响应的系统(如控制系统、通信协议栈),实时性能至关重要。
关键指标:
- 中断延迟: 从中断请求发生到中断服务程序 (ISR) 第一条指令开始执行的时间。
- 任务响应时间: 从事件发生(如中断、信号量释放)到相应处理任务开始执行的时间。
- 任务完成时间: 从任务开始执行到任务完成的时间。
- 抖动: 同一个事件的响应时间或完成时间的变化量。
在关键时间点(如中断入口/出口、任务开始/结束、事件触发点)翻转 GPIO,用示波器或逻辑分析仪精确测量时间间隔。这是最常用且直观的方法。
// 假设 PIN_ISR_ENTRY 连接到示波器通道 1
// 假设 PIN_INT_TRIGGER 连接到示波器通道 2 (用于观察外部触发)
#define PIN_ISR_ENTRY PB0
#define PIN_INT_TRIGGER PC5 // 假设外部事件触发此引脚中断
volatile uint64_t start_time = 0;
volatile uint64_t isr_entry_time = 0;
volatile uint32_t latency = 0;
// 中断服务程序
void EXTI5_IRQHandler(void) {
// 第一件事:拉高引脚,标记 ISR 入口
SetPinHigh(PIN_ISR_ENTRY);
isr_entry_time = GetHighResolutionTimestamp(); // 获取时间戳
// 计算延迟 (如果需要软件计算的话)
// 注意:这里的 start_time 需要在触发中断的代码附近获取,
// 且要考虑 GetHighResolutionTimestamp 本身的开销
// latency = isr_entry_time - start_time;
// ... 处理中断 ...
// 清除中断标志位
ClearInterruptFlag(EXTI_LINE_5);
// 最后:拉低引脚,标记 ISR 出口
SetPinLow(PIN_ISR_ENTRY);
}
int main() {
InitializeGPIO(PIN_ISR_ENTRY, OUTPUT);
SetPinLow(PIN_ISR_ENTRY); // 初始为低
InitializeGPIO(PIN_INT_TRIGGER, INPUT_INTERRUPT); // 配置为中断输入
ConfigureInterrupt(EXTI_LINE_5, RISING_EDGE, EXTI5_IRQHandler);
EnableInterrupt(EXTI_LINE_5);
EnableGlobalInterrupts();
while(1) {
// ... 主循环任务 ...
// 模拟触发中断 (或者等待外部物理触发 PIN_INT_TRIGGER)
// 如果是软件触发测试:
// start_time = GetHighResolutionTimestamp(); // 记录触发前时间戳
// TriggerSoftwareInterrupt(EXTI_LINE_5);
// 等待外部触发时,示波器直接测量 PIN_INT_TRIGGER 上升沿
// 到 PIN_ISR_ENTRY 上升沿的时间差即可得到硬件中断延迟。
}
return 0;
}如 Segger SystemView、Tracealyzer 等工具可以提供非常详细的系统事件追踪,包括中断、任务切换、API 调用等,并自动分析时间性能。
4、外设带宽
有时瓶颈不在 CPU 或内存,而在于外设(如 UART, SPI, I2C, ADC, DAC, USB 等)的数据处理能力。
如何测量:
- 理论计算: 根据外设的时钟频率、配置(如波特率、采样率)计算理论上的最大数据传输速率。
- 实际吞吐量测试: 在特定时间内发送或接收大量数据,统计实际成功传输的数据量,计算实际速率。
- 缓冲区监控: 检查外设驱动程序的发送/接收缓冲区是否经常处于满或空的状态。例如,UART 接收缓冲区频繁溢出,表明 CPU 处理数据的速度跟不上接收速度。
- DMA 效率: 如果使用 DMA,检查 DMA 传输完成所需时间以及 DMA 控制器本身的负载(如果可测量)。
5、功耗与温度
虽然不是直接的计算性能指标,但异常的功耗和温度升高往往是系统超负荷运行的副作用。
如何测量:
- 功耗: 使用精密电源分析仪或在电源路径上串联采样电阻,用示波器或万用表测量电压降,计算电流和功耗。
- 温度: 使用 MCU 内建的温度传感器(如果有)或外部热电偶、红外热像仪测量芯片表面温度。
遇到性能瓶颈时,需要进行详细的性能分析来定位具体问题所在,然后采取针对性的优化措施(算法优化、代码优化、编译器优化、使用 DMA、调整任务优先级等)。如果优化后仍无法满足需求,那么可能就需要考虑升级到性能更强的单片机了。


















 317
317

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











