







 超级会员免费看
超级会员免费看
课程一览:
目录
1.opencv中的绘图函数
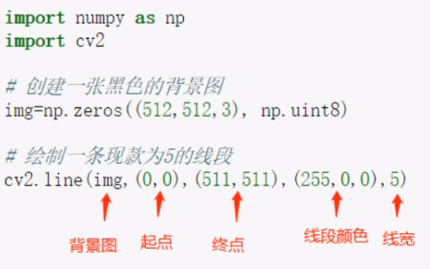
1.1 线段绘制
函数:cv2.line(img,pts,color,thickness,linetype)
参数说明:
- img:待绘制的图像
- color:形状的颜色,元组如(255,0,0)
- pts:起点和终点
- thickness:线条的粗细。-1位填充,默认值是1。
- linetype:线条的类型,8型或cv2.LINE_AA,默认值为8型。(AA比8型更快,8型比AA型更好看)
课程一览:
目录
函数:cv2.line(img,pts,color,thickness,linetype)
参数说明:
 684
684











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言





 订阅专栏 解锁全文
订阅专栏 解锁全文
























