







一、原理介绍
由于传统滑模观测器使用低通滤波器,会导致估计反电动势产生相位滞后和幅值衰减,需要在转子位置估计环节再增加相位补偿环节,导致电机动态性能下降并且信号处理环节繁琐。根据反电动势( EMF)模型设计自适应观测器,处理估计反电动势信号中的高次谐波分量,避免了低通滤波器的使用和相位补偿。
二、仿真模型
在MATLAB/simulink里面验证所提算法,搭建传统SMO和自适应滑模仿真。采用和实验中一致的控制周期1e-4,电机部分计算周期为1e-6。仿真模型如下所示:
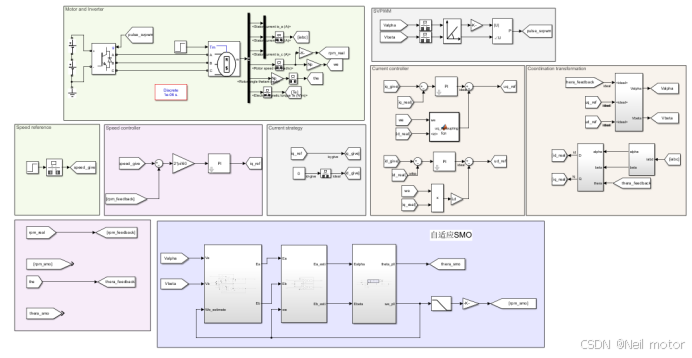
仿真工况:电机空载零速启动,0s阶跃给定转速1000rpm,0.5s施加额定负载
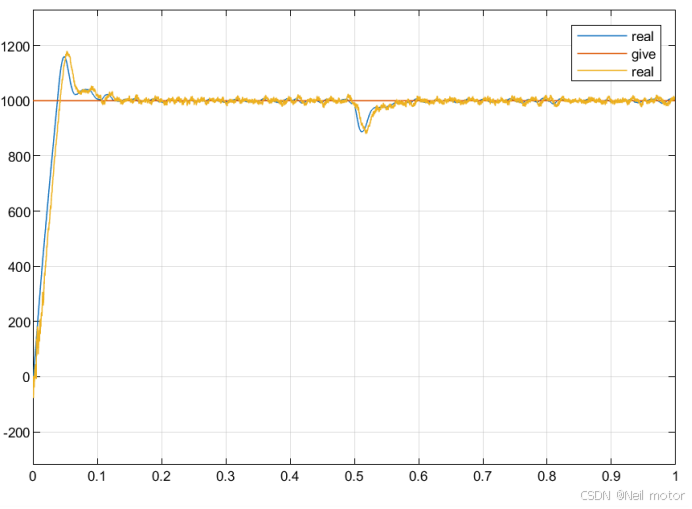
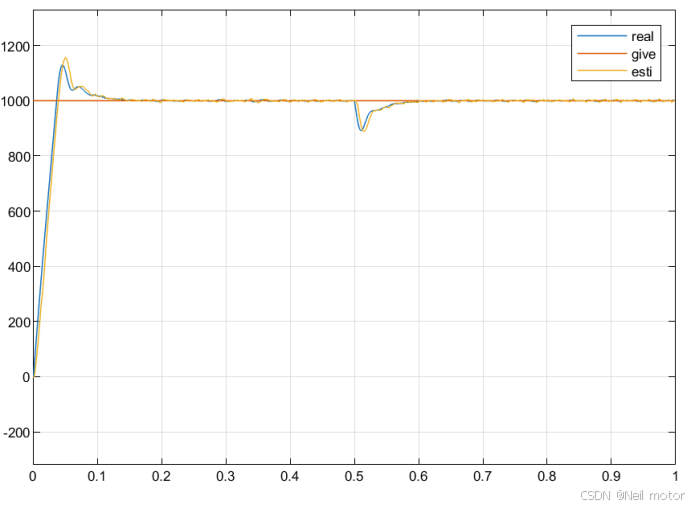
将传统SMO和自适应滑模进行对比验证,前一个为传统SMO,后一个为自适应SMO
2.1给定转速、实际转速和估计转速
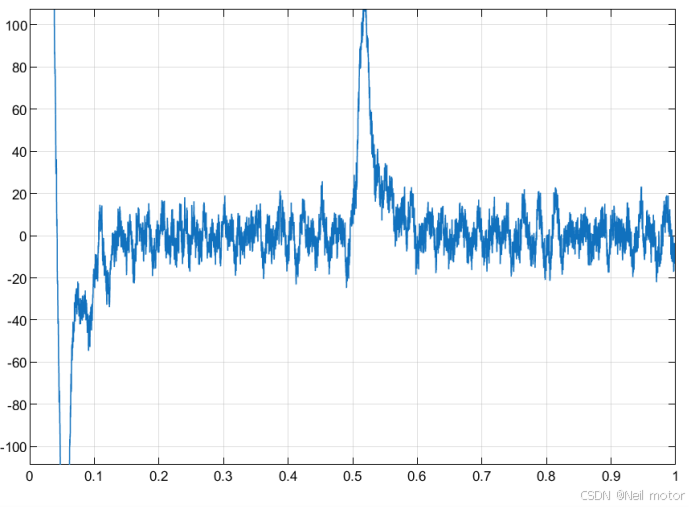
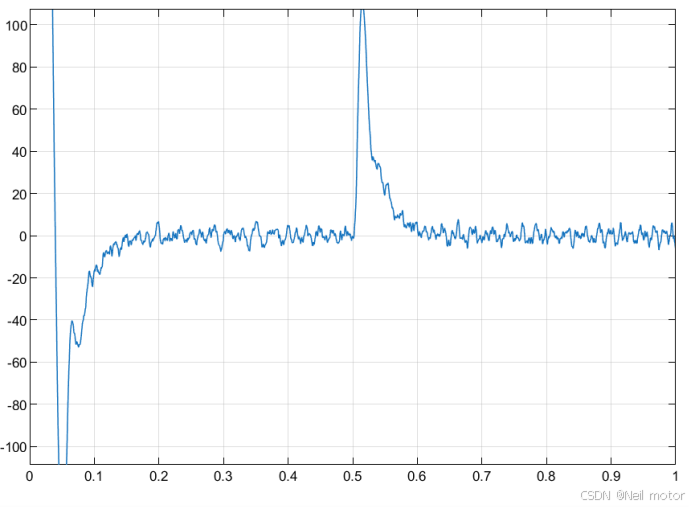
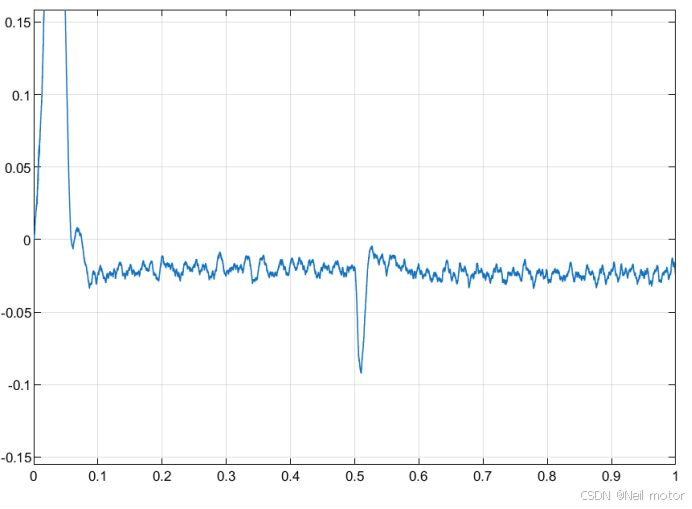
 2.2估计转速与实际转速误差
2.2估计转速与实际转速误差
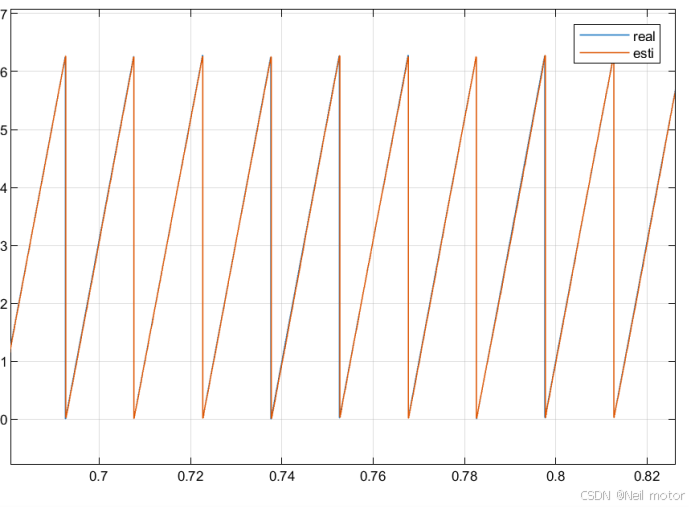
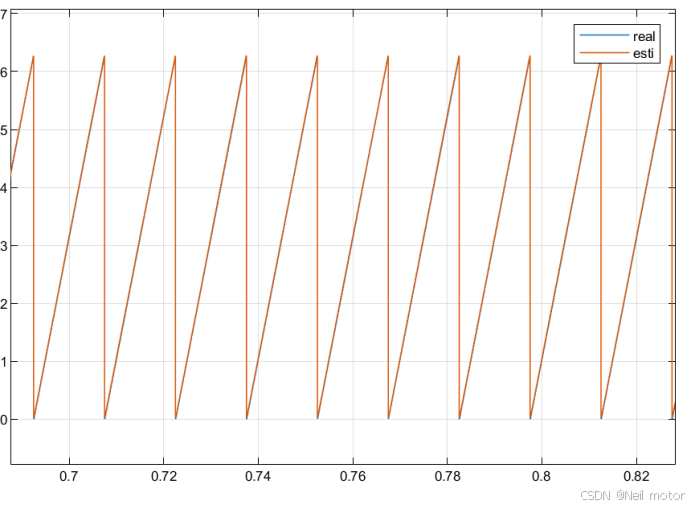
 2.3估计转角与实际转角
2.3估计转角与实际转角
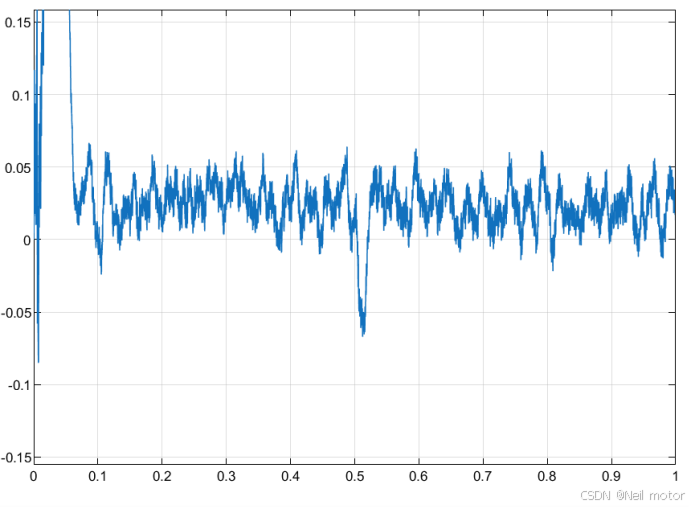
2.4估计转角与实际转角误差
 2.5 估计反电动势
2.5 估计反电动势
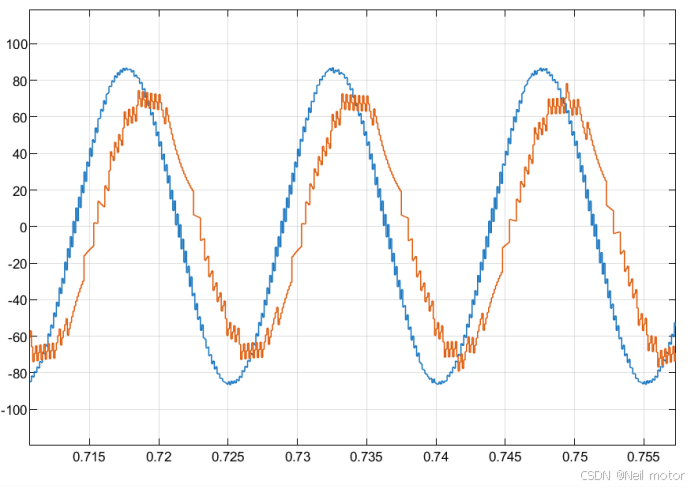
可以看出自适应SMO估计反电动势不存在相位滞后和幅值衰减,并且可以实现较好的滤波效果,综合对比转速和转子位置估计效果,自适应滑模在稳定性明显优于传统滑模


















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









