




一、原理介绍
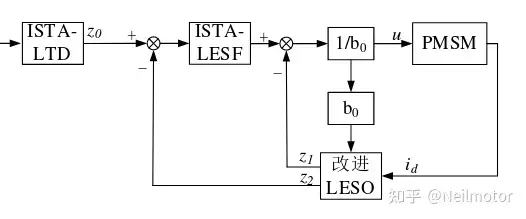
采用一种改进型超螺旋滑模线性自抗扰控制策略(ISTA-LADRC)。该策略结合超螺旋滑模与自抗扰控制技术的特点,能够改善 PMSM调速系统的控制效果。类似下图所示效果。
二、仿真验证
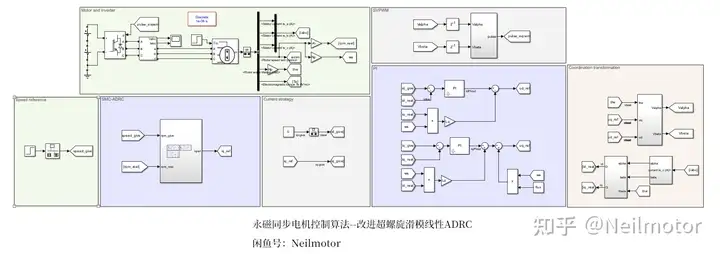
在MATLAB/simulink里面验证所提算法,采用和实验中一致的控制周期1e-4,电机部分计算周期为1e-6。
仿真模型如下所示:
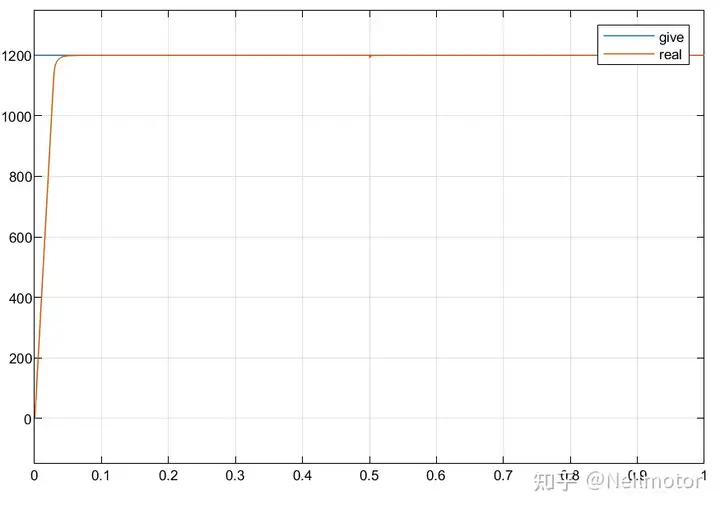
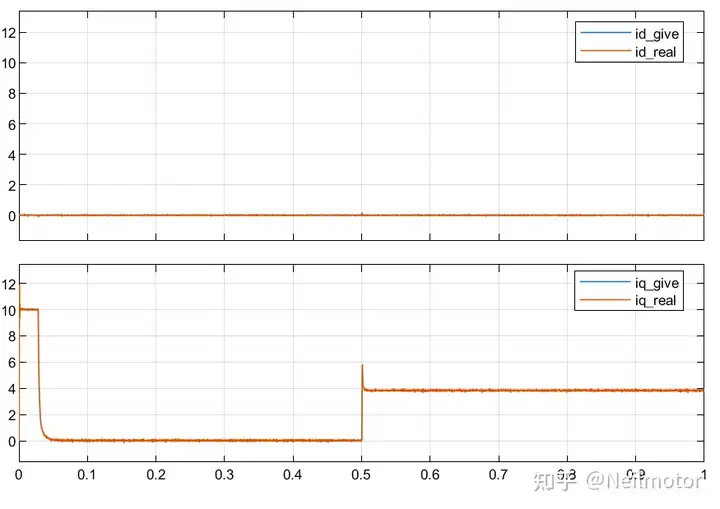
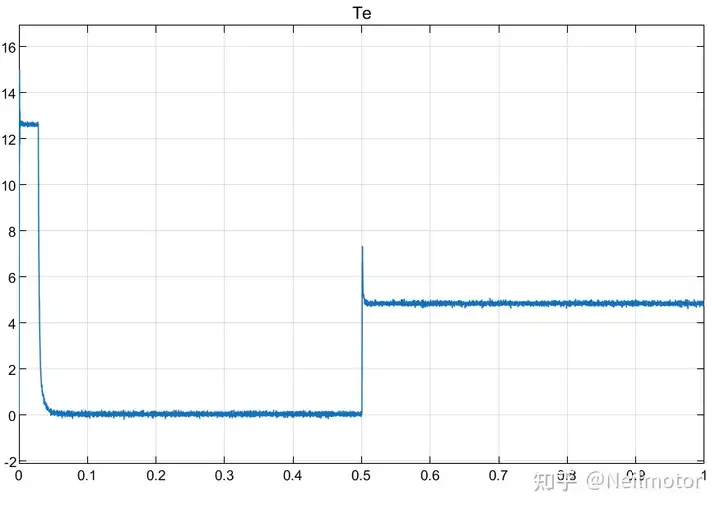
仿真工况:电机空载零速启动,0s阶跃给定转速1200rpm,0.5s施加额定负载
2.1转速
2.2dq轴电流
2.3电磁转矩
2.4三相电流

采用一种改进型超螺旋滑模线性自抗扰控制策略(ISTA-LADRC)。该策略结合超螺旋滑模与自抗扰控制技术的特点,能够改善 PMSM调速系统的控制效果。类似下图所示效果。
在MATLAB/simulink里面验证所提算法,采用和实验中一致的控制周期1e-4,电机部分计算周期为1e-6。
仿真模型如下所示:
仿真工况:电机空载零速启动,0s阶跃给定转速1200rpm,0.5s施加额定负载
 1404
745
2302
1404
745
2302

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


























