







目录
基本介绍
在我们的日常生活中由许多方面都会涉及到 “最短路径” 的搜索问题,比如ROS机器人中根据给定地图进行全局路径规划,或者游戏中NPC的移动计算,线上游戏的的BOT计算等。A*算法作为一种较为高效的算法经常被应用在以上环境中。

基本原理
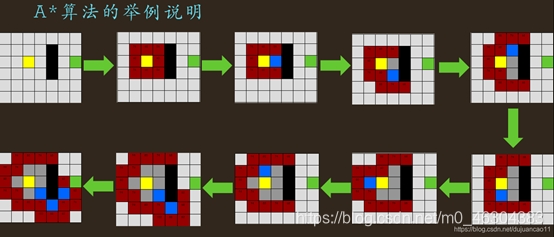
A*算法实现的基本原理是将地图虚拟化并划分成小方块(单元格)以便使用二维数组进行保存,然后搜索当前点周围的点,并从中选择一个新的点作为当前点继续搜索,直至搜索至终点。
有关定义和变量的介绍
- 实际代价G:表示从起点出发移动到地图上当前单元格的移动耗费。例如,我们可以采用从起点开始,经过多少次上下左右移动才移动到指定点作为实际代价G。
- 预估代价H:表示从当前单元格移动到终点的预估耗费。在实际编程中,我们通常采用曼哈顿距离(Manhattan Distance)作为预估代价H,当然也可以采用欧几里得距离(Euclidean Distance)作为预估代价。
- 路径总代价F: F = G + H F = G + H F=G+H,表示该单元格点的总耗费。
- open列表:记录左右被用来考虑寻找最短路径的单元格,通常采用优先队列(priority queue)数据结构。
- close列表:记录已经被淘汰的单元格。一般为与地图对应的布尔二维数组(bool)
- 父亲点列表pre:记录open列表中元素间的逻辑联系;
- 单元格代价列表valueF:记录每一个单元格的最小总代价F。
具体搜索过程
- 首先需要创建一张地图,可以有障碍物但是必须进行标记。
- 设置路径的起点和终点。
- 开始搜索路径:
-
初始化open列表,close列表,pre列表和valueF列表;
-
将起点加入open列表,然后将其周围四个点(或八个点,由需求决定)加入到open列表。将起点从open列表中移除并移动到close列表;
-
依次判断周围这四个点是否在close列表中且是否越界,如果不在,以此计算周围点的G,H并更新F,如果对应单元格在valueF中的值为初始化值或较大,那么更新单元格对应valueF值,记录pre值。伪代码如下:
if (node_next.F < valueF[node_next.x][node_next.y] || valueF[node_next.x][node_next.y] == 0) { // 保存该节点的父节点 pre[node_next] = node_current; //将父亲点添加到pre,建立逻辑联系 valueF[node_next] = node_next.F; // 修改该节点对应的valF值 open.add(node_next); //当前点添加到open列表 } -
从周围的点中找出F最小的点,获得周围点的集合,然后将这个F最小的点从open列表中移除并移动到close集合中;
-
跳转第 3 步。
-
结束条件
- 终点单元格被加入open列表并且被作为当前格查询时;
- open列表被清空,表示不可能到达终点。
与Dijkstra算法的比较
Dijkstra算法和A*都是最短路径问题的常用算法,下面就对这两种算法的特点进行一下比较。
- Dijkstra算法计算源点到其他所有点的最短路径长度,A*关注点到点的最短路径(包括具体路径)。
- Dijkstra算法建立在较为抽象的图论层面,A*算法可以更轻松地用在诸如游戏地图寻路中。
- Dijkstra算法的实质是广度优先搜索,是一种发散式的搜索,所以空间复杂度和时间复杂度都比较高。对路径上的当前点,A*算法不但记录其到源点的代价,还计算当前点到目标点的期望代价,是一种启发式算法,也可以认为是一种深度优先的算法。
- 由第一点,当目标点很多时,A*算法会带入大量重复数据和复杂的估价函数,所以如果不要求获得具体路径而只比较路径长度时,Dijkstra算法会成为更好的选择。
参考文章:Dijkstra算法和A*算法的比较
实现代码
#include <algorithm>
#include <cmath>
#include <iostream>
#include <queue>
#include <string>
#include <vector>
#define N 10 // 地图的阶数
using namespace std;
typedef struct NODE
{
int x, y; // 节点所在位置
int F, G, H; // G:从起点开始,沿着产的路径,移动到网格上指定方格的移动耗费。
// H:从网格上那个方格移动到终点B的预估移动耗费,使用曼哈顿距离。
// F = G + H
NODE(int a, int b) { x = a, y = b; }
// 重载操作符,使优先队列以F值大小为标准维持堆
bool operator<(const NODE &a) const
{
return F == a.F ? G > a.G : F > a.F;
}
} Node;
// 定义方向
//const int next_position[8][2] = {{-1, -1}, {-1, 0}, {-1, 1}, {0, -1}, {0, 1}, {1, -1}, {1, 0}, {1, 1}};
const int next_position[4][2] = {{-1, 0}, {0, -1}, {0, 1}, {1, 0}};
priority_queue<Node> open; // 优先队列,就相当于open表
// 棋盘
int map[N][N] = {{0, 0, 0, 0, 0, 0, 0, 0, 0, 0},
{0, 1, 0, 0, 0, 0, 0, 1, 0, 0},
{0, 0, 1, 1, 0, 0, 0, 1, 0, 0},
{0, 0, 0, 1, 0, 0, 0, 1, 0, 0},
{0, 0, 0, 0, 0, 0, 1, 0, 0, 0},
{0, 0, 1, 1, 0, 1, 0, 0, 0, 0},
{0, 0, 1, 0, 1, 0, 1, 0, 0, 0},
{0, 0, 1, 0, 0, 0, 0, 1, 0, 0},
{0, 1, 0, 1, 0, 0, 0, 0, 0, 0},
{0, 0, 0, 0, 0, 0, 0, 0, 0, 0}};
bool close[N][N]; // 访问情况记录,close列表
int valueF[N][N]; // 记录每个节点对应的F值
int pre[N][N][2]; // 存储每个节点的父节点
int Manhattan(int x, int y, int x1, int y1)
{
return (abs(x - x1) + abs(y - y1)) * 10;
}
bool isValidNode(int x, int y, int xx, int yy)
{
if (x < 0 || x >= N || y < 0 || y >= N)
return false; // 判断边界
if (map[x][y] == 1)
return false; // 判断障碍物
// 两节点成对角型且它们的公共相邻节点存在障碍物,在8方向时用
if (x != xx && y != yy && (map[x][yy] == 1 || map[xx][y] == 1))
return false;
return true;
}
void Astar(int x0, int y0, int x1, int y1)
{
// 起点加入open列表
Node node(x0, y0);
node.G = 0;
node.H = Manhattan(x0, y0, x1, y1);
node.F = node.G + node.H;
valueF[x0][y0] = node.F;
open.push(node);
while (!open.empty())
{
Node node_current = open.top(); //取优先队列头元素,即周围单元格中代价最小的点
open.pop(); //从open列表中移除
close[node_current.x][node_current.y] = true; // 访问该点,加入close列表
if (node_current.x == x1 && node_current.y == y1) // 到达终点
break;
// 遍历node_top周围的4个位置,如果是next_position有8,那么就需要遍历周围8个点
for (int i = 0; i < 4; i++)
{
Node node_next(node_current.x + next_position[i][0], node_current.y + next_position[i][1]); // 创建一个node_top周围的点
// 该节点坐标合法 且没有被访问
if (isValidNode(node_next.x, node_next.y, node_current.x, node_current.y) && !close[node_next.x][node_next.y])
{
// 计算从起点并经过node_top节点到达该节点所花费的代价
node_next.G = node_current.G + int(sqrt(pow(next_position[i][0], 2) + pow(next_position[i][1], 2)) * 10);
// 计算该节点到终点的曼哈顿距离
node_next.H = Manhattan(node_next.x, node_next.y, x1, y1);
// 从起点经过node_top和该节点到达终点的估计代价
node_next.F = node_next.G + node_next.H;
// node_next.F < valueF[node_next.x][node_next.y] 说明找到了更优的路径,进行更新
// valueF[node_next.x][node_next.y] == 0 说明该节点还未加入open表中,则加入
if (node_next.F < valueF[node_next.x][node_next.y] || valueF[node_next.x][node_next.y] == 0)
{
// 保存该节点的父节点
pre[node_next.x][node_next.y][0] = node_current.x;
pre[node_next.x][node_next.y][1] = node_current.y;
valueF[node_next.x][node_next.y] = node_next.F; // 修改该节点对应的valueF值
open.push(node_next);
}
}
}
}
}
void PrintPath(int x1, int y1)
{
if (pre[x1][y1][0] == -1 || pre[x1][y1][1] == -1)
{
cout << "no path to get" << endl;
return;
}
int x = x1, y = y1;
int a, b;
while (x != -1 || y != -1)
{
map[x][y] = 2; // 将可行路径上的节点赋值为2
a = pre[x][y][0];
b = pre[x][y][1];
x = a;
y = b;
}
// ' '表示未经过的节点, '#'表示障碍物, '@'表示可行节点
string s[3] = {" ", " #", " @"};
for (int i = 0; i < N; i++)
{
for (int j = 0; j < N; j++)
cout << s[map[i][j]];
cout << endl;
}
}
int main(int argc, char *argv[])
{
fill(close[0], close[0] + N * N, false); // 将visit数组赋初值false
fill(valueF[0], valueF[0] + N * N, 0); // 初始化F全为0
fill(pre[0][0], pre[0][0] + N * N * 2, -1); // 路径同样赋初值-1
// // 起点 // 终点
int x0 = 2, y0 = 4, x1 = 8, y1 = 6;
// printf("input start: ");
// scanf("%d%d", &x0, &y0);
// printf("iinput destination: ");
// scanf("%d%d", &x1, &y1);
if (!isValidNode(x0, y0, x0, y0))
{
printf("Invalid input.\n");
return 0;
}
Astar(x0, y0, x1, y1); // A*算法
PrintPath(x1, y1); // 打印路径
return 0;
}
运行结果
给定地图如下:
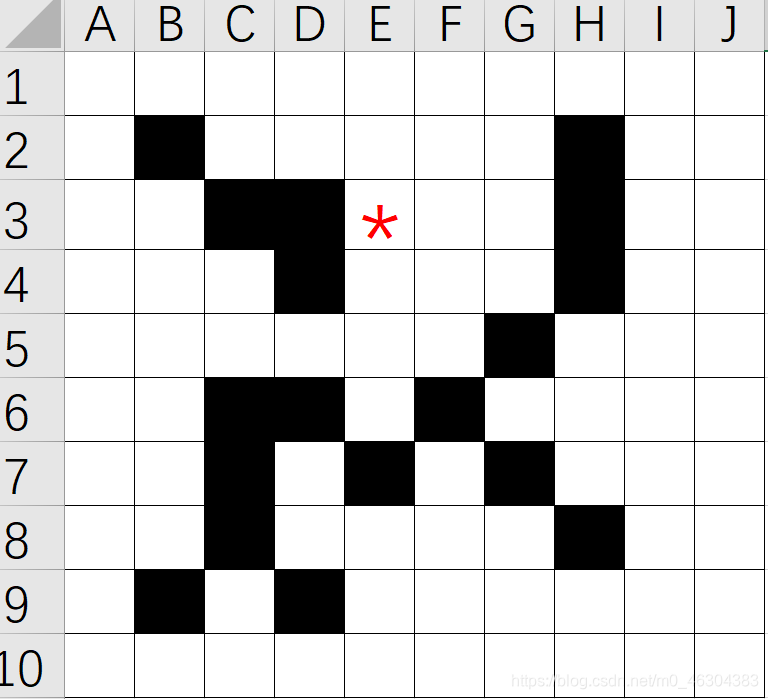
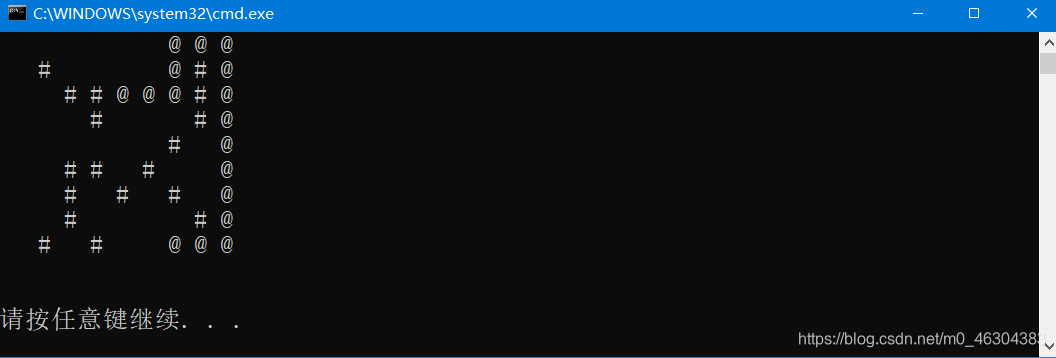
- 起点(2,4),终点(8,6)
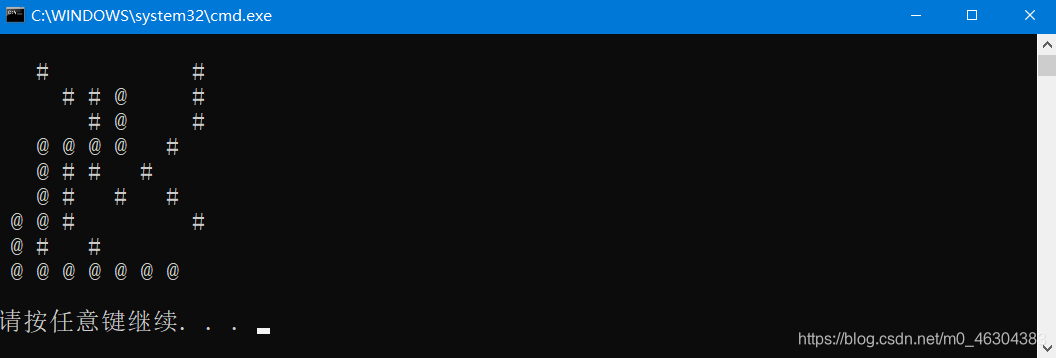
- 起点(2,4),终点(9,6)


















 1149
1149

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











