






安装环境:Ubuntu18.04
1、选择你想要git的ardupilot版本
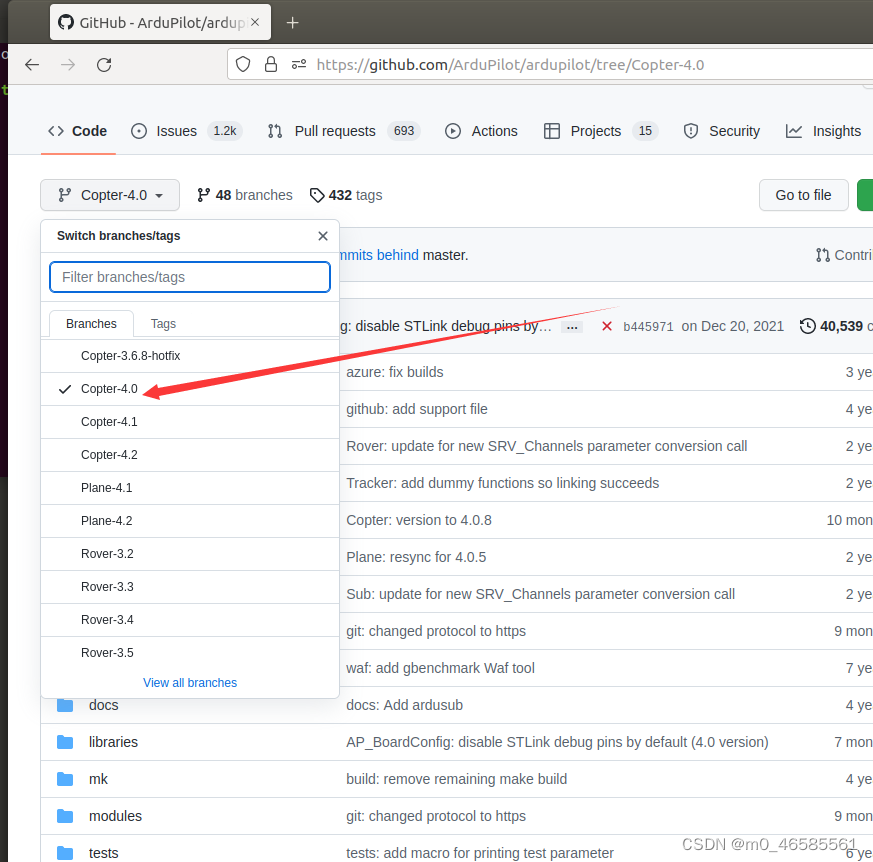
以上是我选择的版本,于是我的git clone语句就是
git clone -b Copter-4.0 https://github.com/ArduPilot/ardupilot2、git clone成功后执行以下语句,把其他子模块也git下来
cd ardupoilt
git submodule update --init --recursivePS:第一步的分支名称一定要对,我在成功之前一直用的是copter-4.0.0,于是就一直显示没有这个分支,子模块也下载不下来!(第一次用git多多包涵)
3、接着就是运行路径/home/XXX/ardupilot/Tools/environment_install中对应的.sh脚本安装各种依赖包
./install-prereqs-ubuntu.sh
. ~/.profile根据自己的操作系统运行相应的脚本
PS:1、其中有一个压缩包gcc-arm-none-eabi-6-2017-q2-update-src.tar.bz2下载的速度很慢,可以自己在这个网址https://github.com/ilg-archived/arm-none-eabi-gcc下载下来,解压放在/opt路径中,然后在执行这个脚本的时候就会跳过下载这个包的过程,节省很多时间。(提前下和不提前下两种我都试过,都成功了。不提前下载,也就晚上睡前打开脚本,睡醒之后也装好了。)
4、以上步骤完成后,ardupilot的仿真环境就安装好了,接下来就是编译了。
./waf configure --board sitl
./waf copter执行上述编译语句即可,下面是编译成功后的结果
5、执行sim_vehicle.py -v ArduCopter --map --console语句
控制台和地图都弹出,且可以正常运行,那么仿真环境就此安装好了!















 1460
1460











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









