







 本文讲述了作者使用ESP8266连接SG90舵机,通过BlinkerAPP远程控制舵机开关灯,介绍了实验方法、线路连接、程序烧录以及APP设置。过程中提到了ESP8266环境配置问题和舵机耐用性问题。
本文讲述了作者使用ESP8266连接SG90舵机,通过BlinkerAPP远程控制舵机开关灯,介绍了实验方法、线路连接、程序烧录以及APP设置。过程中提到了ESP8266环境配置问题和舵机耐用性问题。
0.前言
ESP8266弄丢了好几个都忘记放在哪,重新买了个typeC接口的方便多了,看到驱动SG90舵机作为智能开关,简单复现了一下,代码比较简单,没有连接小爱同学或者其他语音助手。
1.实验方法
ESP8266连接SG90舵机,连接点灯科技APP(Blinker),远程控制舵机旋转角度,达到开关灯目的。
器材主要包括
ESP8266
SG90舵机(180度)–【推荐买SG90舵机360度】
手机APP
环境搭建
由于新换了台式机,导致arduino的环境需要重新配置,主要涉及8266库需要重新安装,找了一圈才找到一个可用的国内源,备份一下。
https://arduino.me/packages/esp8266.json
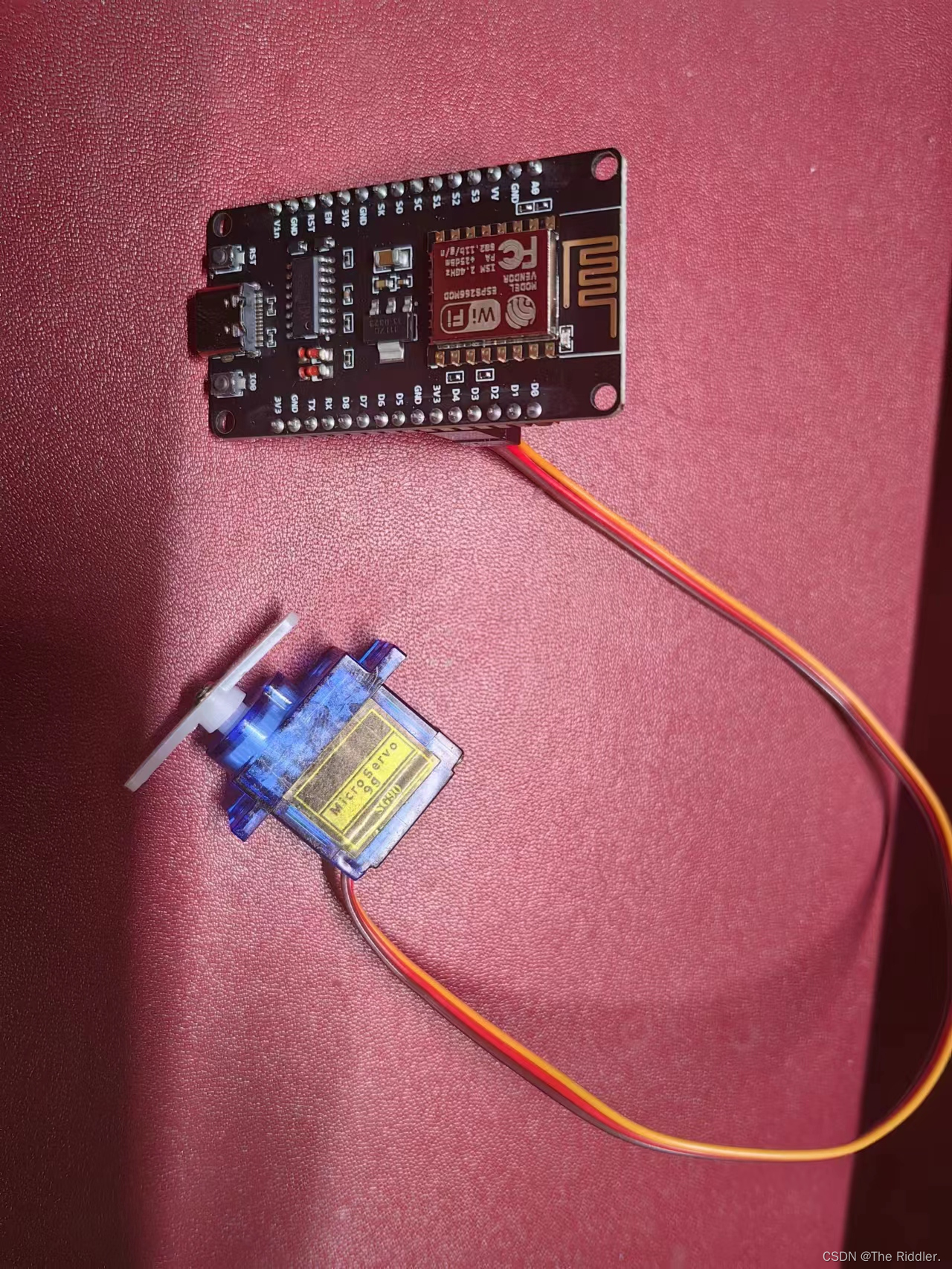
线路连接
SG90舵机
黄线–D4(GPIO2–可选其他接口)
红线–3V3
褐线–GND
程序烧录
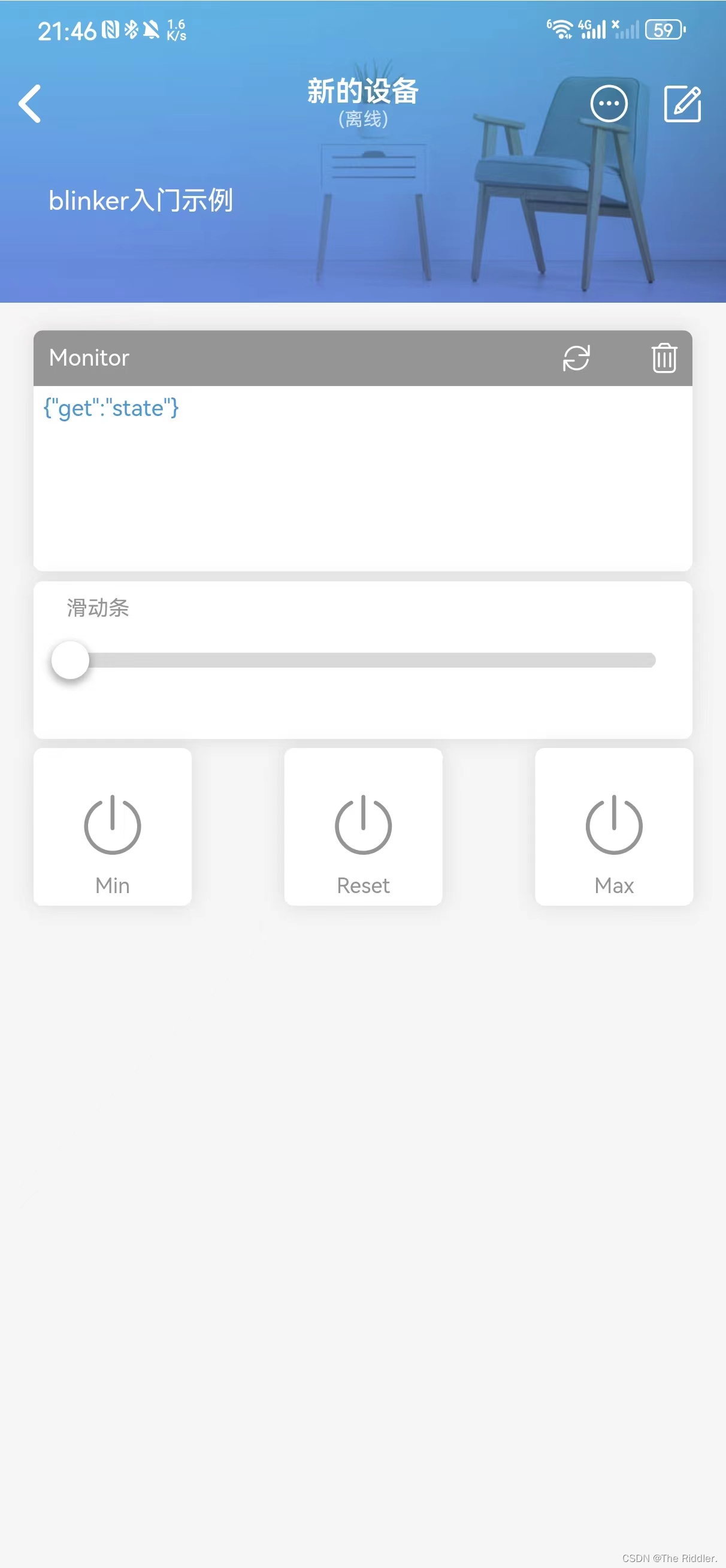
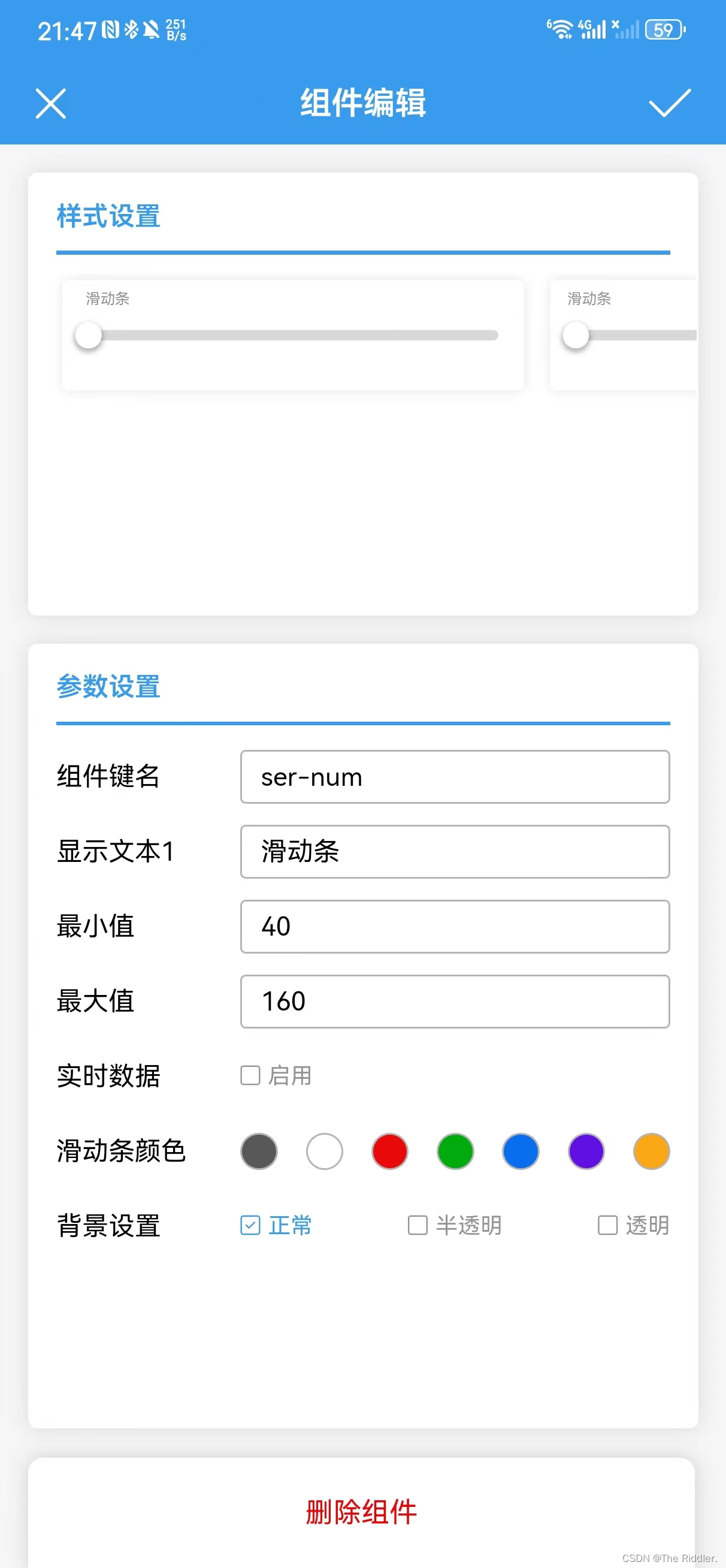
内容比较简单,主要是连接WIFI,使用KEY连接BlinkerAPP,新建Blinker组件,定义组件功能
滑块功能比较鸡肋,可以删除,Blinker里好像没有可以调整固定值的按钮,所以前期可以使用滑块调整旋转角度用;初始设置为90°,90°时置于水平,这样0-180°方便调节角度。
开关灯都是固定角度,调整好就可以不用滑块的功能;这里设置的分别是40°和160°。
#include <Servo.h>
#define BLINKER_WIFI
#define BLINKER_MIOT_OUTLET
#include <Blinker.h>
char auth[] = "XXXXXXXXXXXX"; //key
char ssid[] = "XXXX"; //wifi名称
char pswd[] = "XXXXXXXX"; //wifi密码
Servo myservo;
// 新建组件对象
BlinkerButton Button1("btn-max"); //最大值按钮
BlinkerButton Button2("btn-min"); //最小值按钮
BlinkerButton Button3("btn-set"); //复位-90°
BlinkerSlider Slider3("ser-num"); //滑块
int servo_max,servo_min,servo_set,ser_num,time_num;
void button1_callback(const String & state) { //最大值按钮功能
BLINKER_LOG("get button state: ", servo_max);
myservo.write(servo_max);
Blinker.vibrate();
}
void button2_callback(const String & state) { //最小值按钮功能
BLINKER_LOG("get button state: ", servo_min);
myservo.write(servo_min);
Blinker.vibrate();
}
void button3_callback(const String & state) { //重置按钮功能
BLINKER_LOG("get button state: ", servo_set);
myservo.write(servo_set);
Blinker.vibrate();
}
void slider3_callback(int32_t value) //滑块功能
{
ser_num = value;
myservo.write(ser_num);
Blinker.delay(500);
BLINKER_LOG("get slider value: ", value);
}
void setup() {
Serial.begin(115200);
BLINKER_DEBUG.stream(Serial);
Blinker.begin(auth, ssid, pswd);
Button1.attach(button1_callback);
Button2.attach(button2_callback);
Button3.attach(button3_callback);
Slider3.attach(slider3_callback);
myservo.attach(2); //servo.attach():设置舵机数据引脚
myservo.write(90);
servo_max=160;
servo_min=40;
servo_set=90;
time_num=2000;
}
void loop() {
Blinker.run();
}
APP设置



2.实验结果

3.实验总结
8266连接电脑后莫名反复重启,换了USB口解决问题
舵机塑料齿、塑料舵角不耐用,尤其是塑料舵角容易偏置
Blinker比巴法云方便,整体流程简化了不少,库也比较完善

















 1124
1124

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









