







我眼中的PID
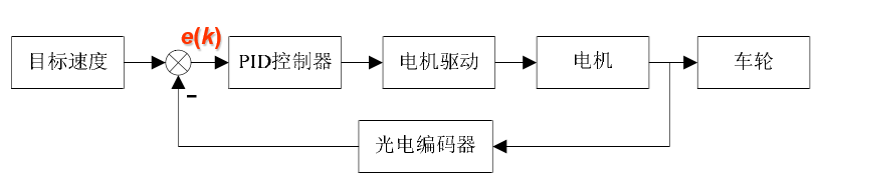
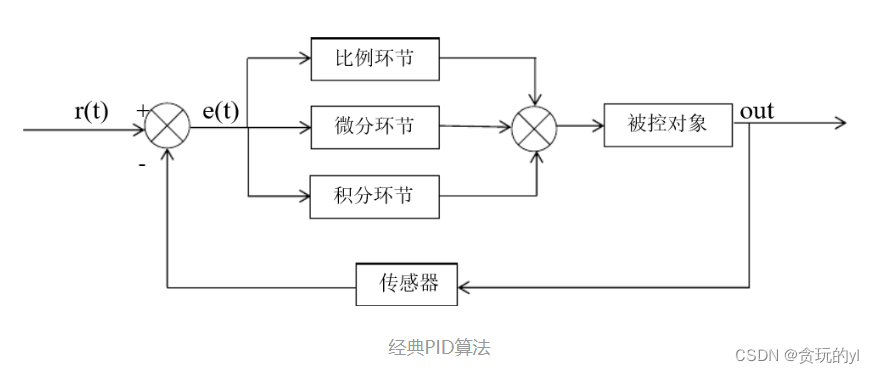
PID控制器的作用环节:
简介
★PID控制技术是一门经典、有效的技术,主要用于闭环控制当中,目的是为了实现较精确控制。PID分数字PID和模拟PID,就按照数字电路和模拟电路去理解,数字是不连续离散的,模拟是连续的。
★为什么叫PID:所谓PID,即比例Proportion、积分Integral 和微分Derivative 三个单词的缩写。在写代码时可以定义Kp、Ki、Kd三个参数,这样显得直观。
★要想了解PID,首先我们来说说PID的应用,简单来说所有需要建立反馈的地方我们都可以采用PID控制器,它是一种控制算法,使用后可以让系统变得更稳定、准确、快速。
名词解释
1.开环控制与闭环控制
★开环控制是不存在反馈调节的(电机控制中反馈由编码器实现),闭环控制是有反馈回路的。
举个反馈调节的例子:以加热水为例,很好地说明了反馈调节的作用,目前20度,目标100度,离80度很远时加热会快一点,而80度很近的时候要加热慢一点。
2.PID的稳定性、准确性、快速性(稳、准、快),介绍这三个特性通过与开环的图来对比


★上图展示的是电机从某个速度到达目标速度的过程,我们一眼就可以发现使用PID后超调小了,响应快了,动态特性更好了。
3.数字式PID又分为位置式和增量式,增量式计算量小于位置式。
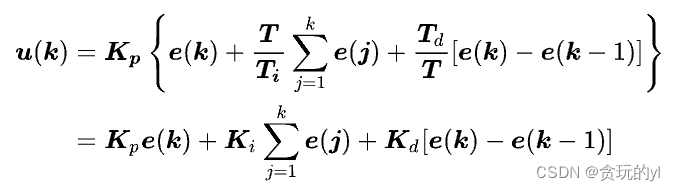
位置式
增量式
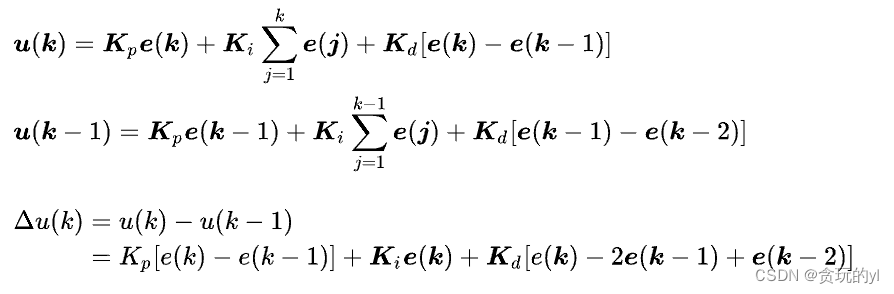
从图中不难看出,增量式是由位置式推导出来的,增量式利用的是k-1时刻和k时刻的位置式计算得出
★两种方式的区别:
常用:转向用位置式,控速用增量式(不绝对),其实大部分情况下还是看需要的数据的获取是否方便,(平衡)速度用PD控制,舵机用PI控制。
★其实在实际代码当中,实现方法是记录此时的变量值,再在函数最后记录一次变量值,好作为下一次循环的输入量,即e(t-1)
★有听说,推荐速度环用增量PID,方向环用位置PID,记录一下,仅供参考。
PID各参数的意义
★P:大,可以加强对系统的控制,减小静态误差,但更加容易产生震荡;小,系统稳定性降低;所以太大太小都不利于稳定。
电机速度闭环控制:纯P控制无法让系统达到目标值,最多到百分之八十左右,再加上I,才可以达到目标值
★I:因为只要存在静态误差,积分后就会累加,影响系统稳定,而“I”可以削弱这个过程,小,积分累积效果削弱不明显,仍会有震荡,且消除所需时间较短;大,超调量减少,积分累积效果被削弱,体现为过渡时不太会震荡,但消除静差所需的时间会很长,系统会显得十分迟缓
★D:预测系统下一刻状态,实现超前(实现当偏差变化瞬间跟着变化,加快跟踪效果);微分的引入也可以实现减小超调量和震荡的作用;D过大过小都不好,都容易造成超调,中间有一个合适值。
补充1:PID在电机中的使用,结合编码器使用,因为涉及到数值计算,关于输出限幅和积分限幅,积分限幅是使用位置式PID带来的缺陷,可以削弱它,输出限幅应该指不能让电机一直满转,类似舵机限幅(机械原因)
★e(k)表示偏差,error
例子
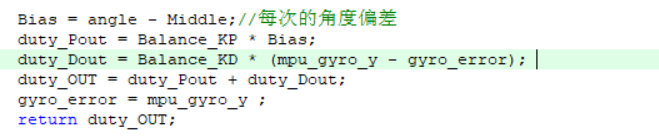
★自己的工程里面用到的舵机PD控制
(下图来源于智能车论坛)

(下面是龙邱例程的位置式和增量式PID代码)


D部分有点小不一样,再更改PreError = LastError即可

注:
1.位置式和增量公式的一个明显区别,在于对P的处理,一个是P * 偏差,一个是P * (偏差 - 上一次偏差)
更新时间:
22-6-23















 4627
4627











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









