






线性方程组与向量
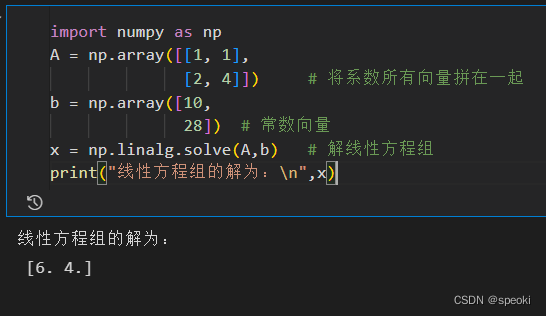
采用的摄像头对动物计数时候,只能统计有多少个头,有多少只脚.现在摄像头采集到的数据是一共有10个头,28只脚,请问鸡兔各有几只?
x
+
y
=
10
x+y=10
x+y=10
2
x
+
4
y
=
28
2x+4y=28
2x+4y=28

系数矩阵

结果矩阵
A = np.array([1,1],[2,4])#定义系数矩阵
b = np.array([10,28])#定义结果矩阵
x = np.linalg.solve(A,b);np.linalg以一个矩阵的方式求解线性矩阵方程
求出来x,y的值所组成的矩阵
向量空间、矩阵、行列式以及范数
Ginger希望多养几种动物,近日他又引入了几只公鸡和几只鸭子,现在采集到的数据是一共有14个头,40只脚,请问鸡兔鸭各有几只?
在这里有三个变量,我们无法根据A和b求得线性方程的唯一解
假设鸭子的数目是
z
z
z只
x
+
y
+
z
=
142
x
+
4
y
+
2
z
=
40
x + y + z = 14 2x+4y + 2z = 40
x+y+z=142x+4y+2z=40
A=np.array([1,1,1],[2,4,2])
b=np.array([14,40])
x=np.linalg.solve(A,b)
我们需要引入动物眼睛的变量才能确定解
x
+
y
+
z
=
14
x + y + z = 14
x+y+z=14
2
x
+
4
y
+
2
z
=
40
2x+4y + 2z = 40
2x+4y+2z=40
2
x
+
2
y
+
2
z
=
28
2x + 2y + 2z = 28
2x+2y+2z=28
A=np.array([1,1,1],[2,4,2],[2,2,2])
b=np.array([14,40,28])
x=np.linalg.solve(A,b)
还是无法得出结果的,因为这个矩阵是一个奇异矩阵。行列式的值为零,新增式子对与求解方程没有作用
向量的运算法则
1.数乘
2.向量的加法
import numpy as np
x=np.array([1,2,3])
x=np.array([4,5,6])
print("x={},y={}".format(x,y))
print("x的维度为{}".format(x.shape))
print("x+y={}".format(x+y))
k=3
print("kx = {}".format(k*x))
print("3x+2y={}".format(3*x+2*y))
向量的线性相关与线性无关
判断方程有唯一解的方法
1.系数矩阵的秩和增广矩阵的秩大小等于未知数的个数
2.(1)未知数个数等于方程的个数
(2)系数行列式
∣
A
∣
≠
0
|A|≠0
∣A∣=0则这个方程组是有唯一解的.
计算方阵的行列式
A=np.array([3,4,5],[3,3,3],[4,4,4])
np.linalg.det(A)
print(np.linalg.det(A))
B=np.array([2,2,2,2],[2,1,0,0],[0,3,1,0],[2,0,0,4])
B_det = np.linalg.det(B)
print(np.linalg.det(B_det))
使用克拉默法则
D=np.array([[2.,1,-5,1],[1,-3,0,-6],[0,2,-1,2],[1,4,-7,6]])
D_det = np.linalg,det(D)
D1 = np.array([[8.,1,-5,1],[9,-3,0,-6],[-5,2,-1,2],[0,4,-7,6]])
D1_det = np.linalg.det(D1)
x1=D1_det/D_det
print("\n x1={:.2f}".format(x1))
对应的向量的关系
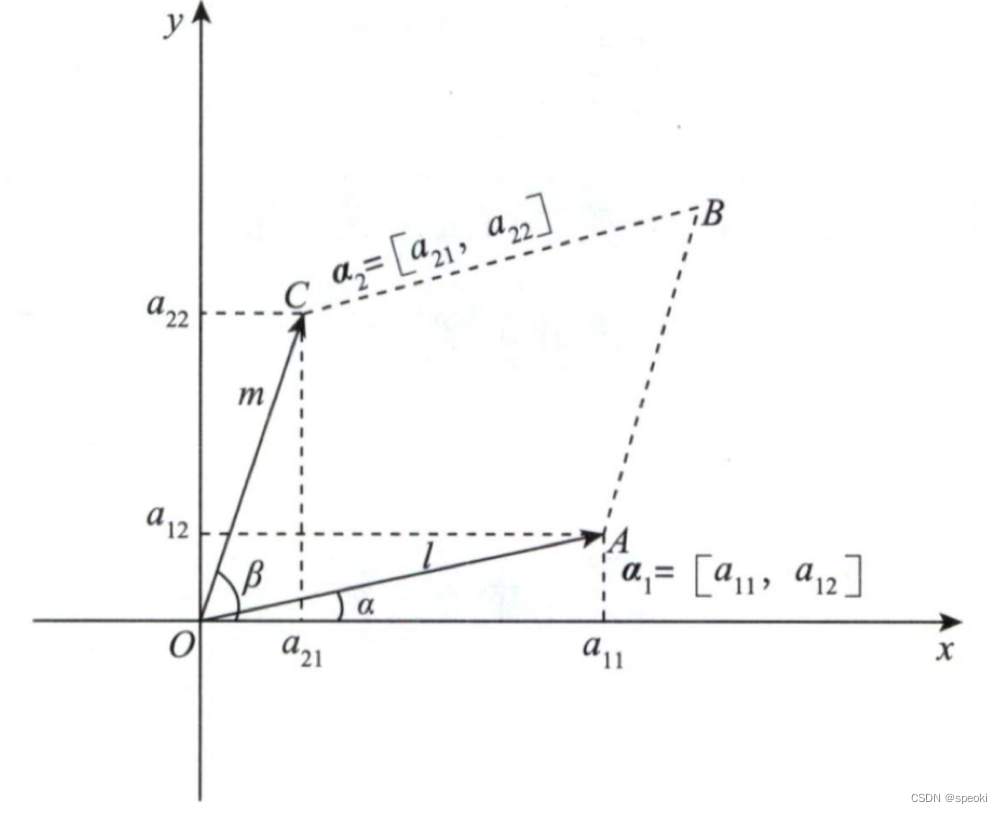
向量的几何意义
S □ O A B C = l ⋅ m ⋅ sin ( β − α ) = l ⋅ m ( sin β cos α − cos β sin α ) = l cos α ⋅ m sin β − l sin α ⋅ m cos β = a 11 a 22 − a 12 a 21 \begin{aligned} S_{\square O A B C} &=l \cdot m \cdot \sin (\beta-\alpha) \\ &=l \cdot m(\sin \beta \cos \alpha-\cos \beta \sin \alpha) \\ &=l \cos \alpha \cdot m \sin \beta-l \sin \alpha \cdot m \cos \beta \\ &=a_{11} a_{22}-a_{12} a_{21} \end{aligned} S□OABC=l⋅m⋅sin(β−α)=l⋅m(sinβcosα−cosβsinα)=lcosα⋅msinβ−lsinα⋅mcosβ=a11a22−a12a21
∣ a 11 a 12 a 21 a 22 ∣ = a 11 a 22 − a 12 a 21 = S □ O A B C \left|\begin{array}{ll} a_{11} & a_{12} \\ a_{21} & a_{22} \end{array}\right|=a_{11} a_{22}-a_{12} a_{21}=S_{\square O A B C} ∣∣∣∣a11a21a12a22∣∣∣∣=a11a22−a12a21=S□OABC
矩阵
两个矩阵相乘
A=np.array([[1,2],[1,-1]])
B=np.array([[1,2,3],[-1,1,2]])
C = np.array([[1, 2],[3, 4]])
print("{}".format(A.shape))
print("{}".format(B.shape))
print("{}".format(np.matmul(A,B)))#AB
print("A+C = \n", A + C) # A+C
print("3*A = \n", 3 * A) # 3*A
1.单位矩阵
np.eye(3)
2.初等矩阵
交换矩阵的两行
P = np.array([[0, 1],[1, 0]])
np.matmul(P, A) # 交换了矩阵的两行
P = np.array([[2, 0],[0, 1]])
np.matmul(P, A) # 第1行乘2
矩阵的一行加到另外一行
注意左乘和右乘的区别
行变换左乘,列变换右乘
P=np.array([[1,0],[1,1]])
np.matmul(P,A)
矩阵求逆
矩阵可逆必为方阵
import numpy as np
A=np.array([[1,2],[3,4]])
print(np.linalg.det(A))#检测是否为奇异矩阵
print(np.linalg.inv(A))
A_inv=np.linalg.inv(A)
print(np.matmul(A,A_inv))#验证
伪逆的定义
A
A
g
A
=
A
AA^gA=A
AAgA=A,则称
A
g
A^g
Ag为
A
A
A的伪逆(广义逆).
相似矩阵的定义
A
=
P
−
1
B
P
A = P^{-1}BP
A=P−1BP
A与B相似
对角矩阵的定义
A = np.array([[1, 0, 0],
[0, 2, 0],
[0, 0, 3]])
找出一个A的相似且为对角矩阵
使得此矩阵特征值
λ
i
\lambda_i
λi满足
A x = λ i x Ax = \lambda_i x Ax=λix
A=np.array([-2,1,1],[0,2,0],[-4,1,3])
lamb,p=np.linalg.eig(A)#求解特征值和特征向量
求出来的特征向量对角化
np.matmul(np.linalg.inv(p),np.matmul(A,p))
经过数值过滤
# 数值过滤
res = np.matmul(np.linalg.inv(p),np.matmul(A,p))
res[np.abs(res) <1e-6] = 0
print(res)
Λ = [ − 1 2 2 ] \Lambda=\left[\begin{array}{lll} -1 & & \\ & 2 & & \\ & & 2 \end{array}\right] Λ=⎣⎡−122⎦⎤
正交矩阵
A
T
A
=
A
A
T
=
I
A^TA = AA^T = I
ATA=AAT=I
A
−
1
=
A
T
A^{-1} = A^T
A−1=AT
性质:A的各行是单位向量且两两正交(垂直),又或者说A的各列是单位向量且两两正交(垂直)
α
i
⋅
α
j
T
=
0
(
i
≠
j
)
\alpha_{i} \cdot \alpha_{j}^{T}=0 \quad(i \neq j)
αi⋅αjT=0(i=j)
α
i
⋅
α
i
T
=
1
\alpha_{i} \cdot \alpha_{i}^{T}=1
αi⋅αiT=1
行列式的绝对值描述了向量围成的面积/体积,因此正交矩阵的行列式要么是1,要么是-1。
1
=
det
(
I
)
=
det
(
A
T
A
)
=
det
(
A
T
)
det
(
A
)
=
det
(
A
)
2
⇒
det
(
A
)
=
±
1
\begin{aligned} &1=\operatorname{det}(I)=\operatorname{det}\left(A^{T} A\right)=\operatorname{det}\left(A^{T}\right) \operatorname{det}(A)=\operatorname{det}(A)^{2} \\ &\Rightarrow \operatorname{det}(A)=\pm 1 \end{aligned}
1=det(I)=det(ATA)=det(AT)det(A)=det(A)2⇒det(A)=±1
施密特正交化
from scipy.linalg import *
A = np.array([[1,2,3],[2,1,3],[3,2,1]])
B=orth(A)#正交化,奇异值分解不是施密特正交化
np.matmul(B,np.transpose(B))#单位矩阵
res = np.matmul(B,np.transpose(B))#数值过滤
res[np.abs(res) <1e-6] = 0















 1514
1514











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









