







成像镜头也称为机器视觉镜头或物镜,通常简称为镜头。为了简化,成像镜头将在以下各节讨论中简称为镜头。
1.1部分:镜头剖析
- 调焦环:转动此环会改变镜头最佳聚焦位置。从第一片镜片表面到物件的距离称为工作距离。
- 虹膜/光圈调节环:转动此环会改变镜头内的光圈大小,也就是F值(f/#)。除了控制通过镜头总光量之外,f /#对镜头有很多其他关键影响性能表现。
- 指旋螺钉:用于暂时锁定聚焦和/或光圈防止不必要的调整。
- 镜头资讯:镜筒上会标示出镜头资料,通常给出焦距,最小f/#,料号和镜头制造商名。
- 工作距离范围:通常定义工作距离为镜头可聚焦的范围。有时称为物距范围。
- f/#刻度线:镜筒上的标示光圈的刻度线代表转动光圈调节环时,镜头设定的F/#。
- 滤光片螺牙尺寸:如果第一片镜片没有从镜头前端顶出,这是机器视觉滤光片放置位置。如果第一片镜片超出镜筒,或者镜头是广角镜,可能需要额外的转接环。
- 相机接环:这边指的镜头尾端上的接环或是相机上接环。常见的接环有C接环,F接环,TFL接环,和S接环。
- 后凸起位置:这是经由镜肩由镜头伸往相机端的距离长度。应注意避免与相机中的红外线截止滤光片或电子元件干涉。
- 第一片表面:第一片表面可以定义为第一片光学镜片表面或是从镜筒或镜筒伸出的镜片本身。工作距离定义为物件表面到第一面镜片表面的距离。
- 最后一片表面:最后一片表面可以镜头本身最后一个光学镜片或是在传感器前之前镜片。
- 镜肩:这是和相机承靠面接触的镜片表面。
- 整体长度:镜头总长度是第一面镜片算起到镜肩距离。通常,相机的接环部分是不包括在内,因为它将被连接到相机上。
- 承靠面距离:此为镜肩到像平面的距离。相机和镜头之间的承靠距离通常是标准化以便用来使用不同镜头接环设计确保相容性。
- 像平面:镜头成像的位置,通常是相机传感器位置。

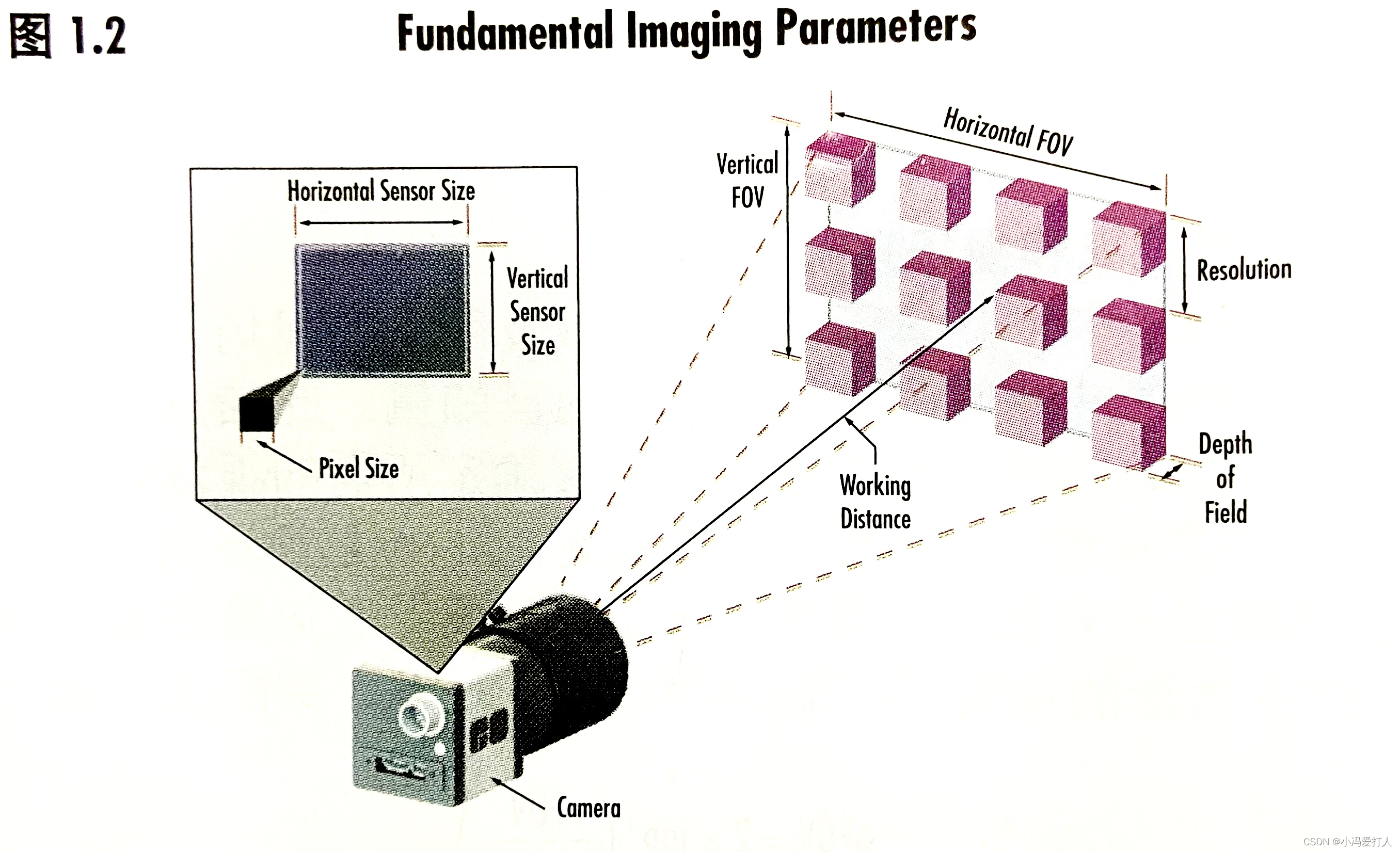
1.2部分:成像基本参数
- 视场(FOV):待测物的可视范围。这是待测物映射到相机整个传感器上。该区域通常为水平方向(HFOV) 或垂直方向 (VFOV)尺寸以便于计算。
- 工作距高(WD):从待测物到镜头前端或是第一片镜片表面距离算起。
- 分辨率:成像系统中对待测物最小可解析特征定为空间频率,单位为线对每毫米(lp/mm)。
- 景深 (DOF):待测物可接受聚焦条件下最大可达成深度。DOF也是待测物可移动范国内(进出最佳聚焦点)保持清晰度。不要与景深混淆焦深指的是成像可以聚焦在传感器。
- 传感器尺(H):相机传感器有效区域的大小,通常指的是水平方向或垂直方向。这个重要参数需要用它计算镜头放大倍率来得出视场大小。
- 像素大小(s):像素外型通常为正方形,在传感器上以网格形式排列,尺寸为微米 (um)
- 放大倍率(m):镜头的放大倍率有时候被称为PMAG(主放大倍率)定义为FOV和传感器的比值。
1.3部分:了解焦距与视场
固定焦距镜头
固定焦距镜头,也称为传统或近心镜头,是一款具有固定视场角(AFOV)的镜头。尽管视角保持不变,但通过调整镜头的工作距离,仍可获得不同大小的视场(FOV)。AFOV通常被指定为搭配镜头使用的传感器的水平尺寸(宽度)相关的全角(以度为单位)。
注意:不应将固定焦距镜头与定焦镜头相混淆。固定焦距镜头能够针对不同距高调节镜头焦距:而定焦镜头则设计用于一、特定的工作距离。定焦镜头的示例包括多款远心镜头和显微镜物镜。
镜头焦距可定义其视场角。对于给定的传感器尺寸,焦距越短,镜头的视场角越宽。此外,镜头的焦距越短,获得与焦距较长的镜头相同的视场所需的距离越短。对于简单、薄凸的镜头,焦距为镜头后面到置于镜头前无限远的物体所形成的影像平面之间的距离。
从此定义中可以看出,镜头的视场角与焦距有关(方程式 1.2).其中f是是焦距(以毫米为单位),H是传感器的水平尺寸(以毫米为单位)
A F O V = 2 ∗ t a n − 1 ( H / 2 f ) AFOV =2* tan^{-1}(H/2f) AFOV=2∗tan−1(H/2f)
但是,焦距一般从镜头的后主平面(很少位于成像镜头的后实体面)进行测量,这是导致使用近轴方程式计算出的工作距离只是近似值的原因之一,系统仅应采用计算机模拟生成的数据或取自镜头规格表的数据进行机械设计。通过镜头计算器进行近轴计算是加快镜头选择过程的良好出发点,但是应谨慎使用所得出的数值。
使用固定焦距镜头时,有三种方式可以更改系统(相机和镜头)
1.定视场角的视场。第一种,通常也是最简单的选项,是更改从镜头到物体之间的工作距离,让镜头远离物体平面可增大视场。第二个是,将正在使用的镜头置换为不同焦距的镜头。第三个是,更改所用传感器的尺寸,对于相同的工作距离,较大的传感器会产生的较大的视场(如方程式1.2所定义)。
尽管通常采用非常宽的视场角会很方便,但也有一些负面影响需要考虑。首先,某些短焦距镜头出现的失真程度会显著影响实际场角,并且可能会由于不同程度的失真导致与工作距离(WD)相关的角度发生变化。其次,与长焦距镜头选项相比,短焦距镜头一般很难获得最高水平性能。
此外,短焦距镜头可能难以覆盖中到大型的传感器尺寸的传感器,这限制了其可用性。
更改系统视场的另一种方法是使用变焦镜头或变倍镜头;这些类型的镜头允许调节焦距,因此具有可变的视场角。相较于固定焦距镜头,变焦镜头和变倍镜头在尺寸和成本方面存在弊端,并且通常无法提供与固定焦距镜头同等的性能。

使用工作距离和市场来确定焦距
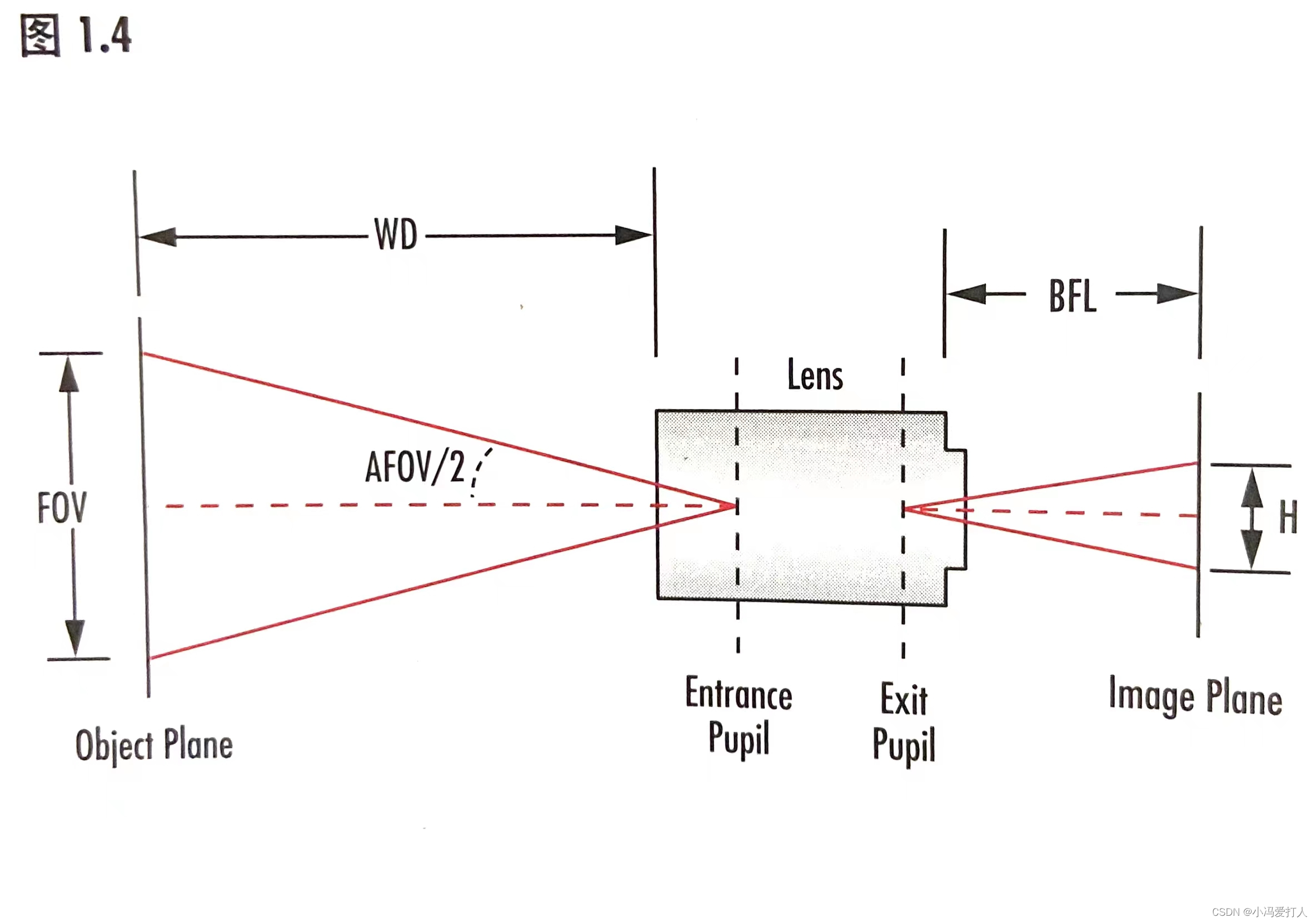
在许多应用中,物体所需的距离以及所需的视场(通常为具有额外缓冲空间的物体尺寸)为已知量。此信息可用于通过方程式1.3中所示的公式来直接确定所需的视场角,其中,WD是从镜头端开始的工作距离,AFOV是视场角。方程式1.3相当于查找一个高度等于工作距离,底边等于水平视场的三角形的顶角(如图1.4所示)。注意:实际上,这个三角形的顶点很少会位于镜头的前实体面,即我们测量工作距离的起始位置,而且仅应用作近似值,除非入瞳位置己知在确定所需的视场角后,即可使用方程式1.2计算出焦距的近似值,然后在镜头规格表或数据表中,通过寻找最接近的可用焦距(具有适合所使用传感器的必要视场角)来选择适当的镜头。
示例1得出的14.25°(请参考该页下方白框中的内容)可用于确定所需的镜头,但还必需选择传感器尺寸。随着传感器尺寸增加或减少,镜头成像使用范围也随之改变,这会改变系统的视场角,进而改变整个视场。对于相同焦距,传感器越大,所获得的视场角就越大。例如,25mm镜头可以与½°(水平尺寸为6.4mm)的传感器
配合使用,35mm镜头可以 与⅔(水平尺寸为8.8mm)的传感器配合使用,因为它们都会在各自的传感器上生成大约14.5°的视场角。或者,如果己经选定传感器,则可以直接通过视场和工作距离确定焦距,方法是将方程式1.2代入方程式1.3(如方程式1.4所示)。
如前文所述,应考虑对系统的工作距离提供一定的弹性,因为以上示例只是一阶近似值,并且也没有将失真考虑在内。
A
F
O
V
=
2
∗
t
a
n
−
1
(
F
O
V
/
2
W
D
)
o
r
AFOV =2* tan^{-1}(FOV/2WD)or
AFOV=2∗tan−1(FOV/2WD)or
A
F
O
V
=
2
∗
W
D
∗
t
a
n
(
A
F
O
V
/
2
)
公
式
1.3
AFOV =2*WD* tan(AFOV/2) 公式1.3
AFOV=2∗WD∗tan(AFOV/2)公式1.3
f
=
(
H
∗
W
D
)
/
F
O
V
公
式
1.4
f =(H*WD)/FOV 公式1.4
f=(H∗WD)/FOV公式1.4
使用具有固定放大倍率的镜头计算视场
使用具有固定放大倍率的镜头计算视场
一般来说,具有固定放大倍率的镜头具有固定或有限的工作距离范围。尽管使用远心或其他固定放大倍率镜头时,会因不允许通过改变工作距离来获得不同的视场而受到更大的约束,但针对它们的计算非常直接,如方程式1.5所示。
F
O
V
=
H
/
m
公
式
1.5
FOV=H/m 公式1.5
FOV=H/m公式1.5
由于所需的视场和传感器通常己知,因此可以通过将方程式1.5重组成方程式1.6来简化镜头选择流程。
m
=
H
/
F
O
V
公
式
1.1
m=H/FOV 公式1.1
m=H/FOV公式1.1
如果所需放大倍率己知,且工作距离受约束,则可以重新整理方程式1.4(将H/FOV替换为放大倍率)并用其来确定适当的固定焦距镜头(如方程式1.6所示)。
m
=
f
/
W
D
公
式
1.6
m =f/WD 公式1.6
m=f/WD公式1.6
青注意,方程式1.6是一个近似值,对于大于0.1的放大倍率或较短的工作距离,其准确度会快速下降。对于超过0.1的放大倍率,应使用固定放大倍率的镜头或采用适当镜头模型的计算机模拟(例Zemax)。出于相同原因,因特网上常见的镜头计算器应该仅供参考。如有疑问,请查阅镜头规格表。
注意:为了方便,视场讨论中一般使用水平视场,但必需考虑传感器的宽高比(传感器宽度与高度之比),其中,宽高比作为分数使用,以确保整个物体适合图像(方程式 1.7)
A
s
p
e
c
t
R
a
t
i
o
=
H
o
r
i
z
o
n
t
a
l
F
O
V
/
V
e
r
t
i
c
a
l
F
O
V
Aspect Ratio =HorizontalFOV/VerticalFOV
AspectRatio=HorizontalFOV/VerticalFOV
公式1.7
尽管大多数传感器的宽高比都是 4.3,但5:4 和1:1也很常见。宽高比的这一差别还会导致同一种传感器格式的传感器出现不同尺寸。本部分中使用的所有方程式都可用于计算垂直视场,只要将方程式中指定的水平尺寸替换为传感器的垂直尺寸。
















 7398
7398











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











