






目录
1、新板入手
RDK X5 是一款强大的开发板,专门设计用于机器人和人工智能领域的项目。它具备高性能的计算能力、丰富的接口和扩展功能,非常适合用来进行机器视觉、SLAM、深度学习等应用。它具有丰富的接口和扩展功能,RDK X5 板载丰富的 I/O 接口,能够连接各类传感器、摄像头、显示器和其他外设。RDK X5 支持千兆以太网和 Wi-Fi,可以保证在高带宽数据传输应用(如视频流处理和远程监控)中的稳定性。支持Linux操作系统,RDK X5 很适合运行 AI 相关的算法,特别是在处理边缘计算任务时(如图像分类、目标检测)。板子上集成的 NPU(如果有)能加速 AI 推理,减少延迟。同时,它也兼容 TensorFlow、PyTorch 等流行的 AI 框架。RDK5拥有多种连接模式,极大便利了开发者的开发体验,特别值得一提的是闪连模式,仅需一根type-c线就能连接板子。其开发者社区有极其丰富的资源,总体来说这款产品是一款性能及性价比极高的板子。

由于收到货时只有一块裸板,所以板子散热我暂时用小风扇进行散热,散热很猛!!!

2、RDK studio的使用测评
(1)使用RDK studio进行系统烧录
使用该功能能够迅速进行镜像烧录,大大提高了烧录效率并且简化了流程。仅仅只需要一根数据线即可完成板卡升级。
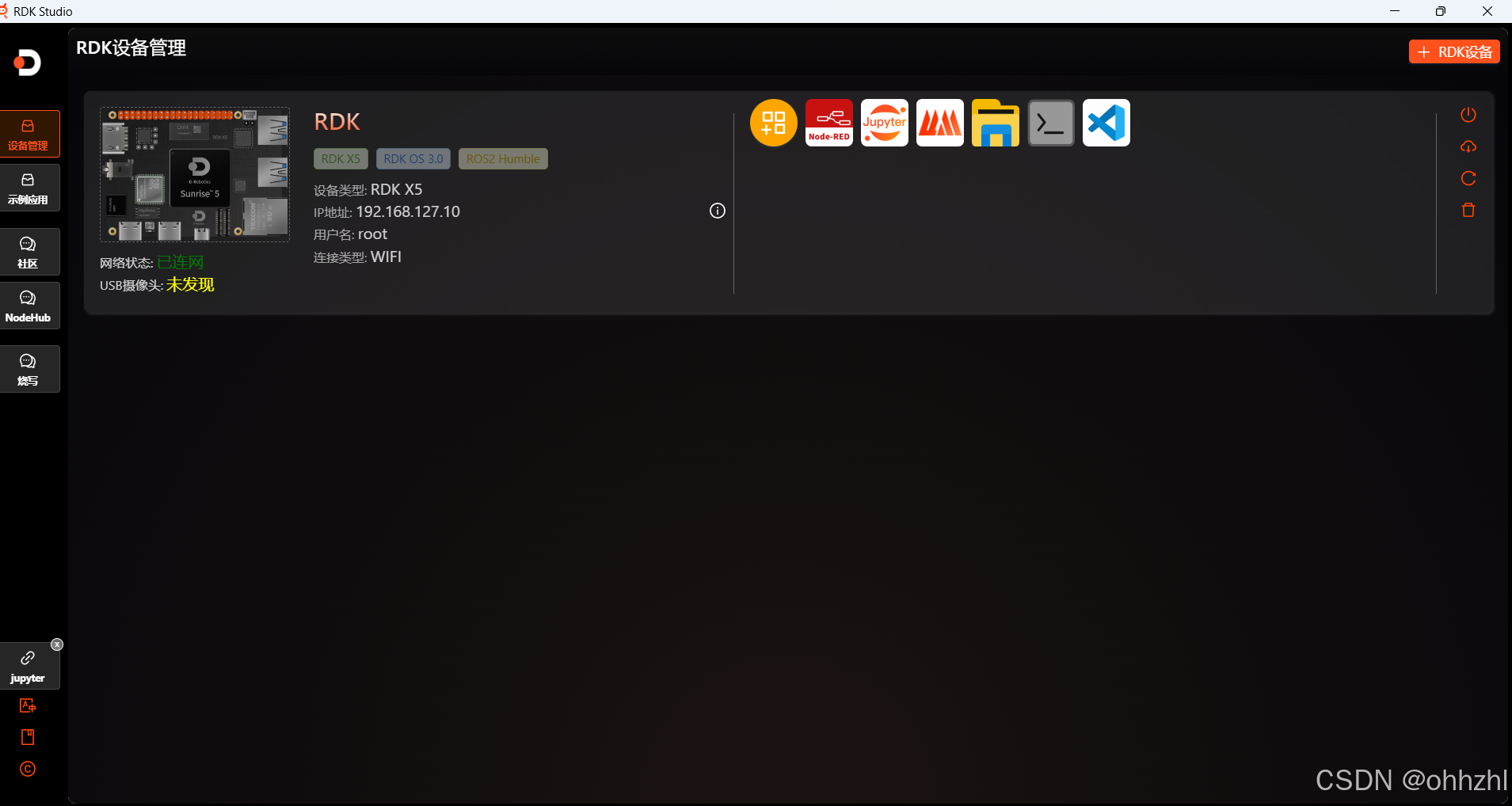
(2)使用RDK studio进行板卡连接
RDK studio连接板卡一共有三种方式,分别是:网线、闪联、IP地址。闪联模式是新推出的一种连接模式,连接方式方便,只需要一根数据线即可,个人更喜欢这种连接模式。
(3)RDK studio的示例应用
我对于RDK studio中的摄像头拍照进行了简单测试,这里我仅仅只调用了摄像头,测试了node-red软件,该软件采用图像化编程,用户交互界面简洁方便,简单易懂,极大降低了使用难度以及趣味性。
RDK Studio 提供了一个用户友好的界面,方便开发者编写、调试和测试代码。提供了一系列现成的算法库,涵盖运动控制、路径规划、导航和图像处理等功能,帮助开发者快速实现复杂功能。并且浏览社区也极为方便。总的来说,RDK studio的应用极大便利了用户的开发流程,目前发布的一些内置应用目前能够满足大部分的开发需求,对于管理开发板也有很大的帮助。可以在多个操作系统(如 Windows、Linux)上运行,方便开发者根据自己的环境进行选择。
3、NodeHub测评
对于NodeHub的测评我主要测评了两个项目,FCOS目标检测算法和火山引擎大模型。下面我将对于这两个算法进行简单的说明。
(1)FCOS目标检测算法
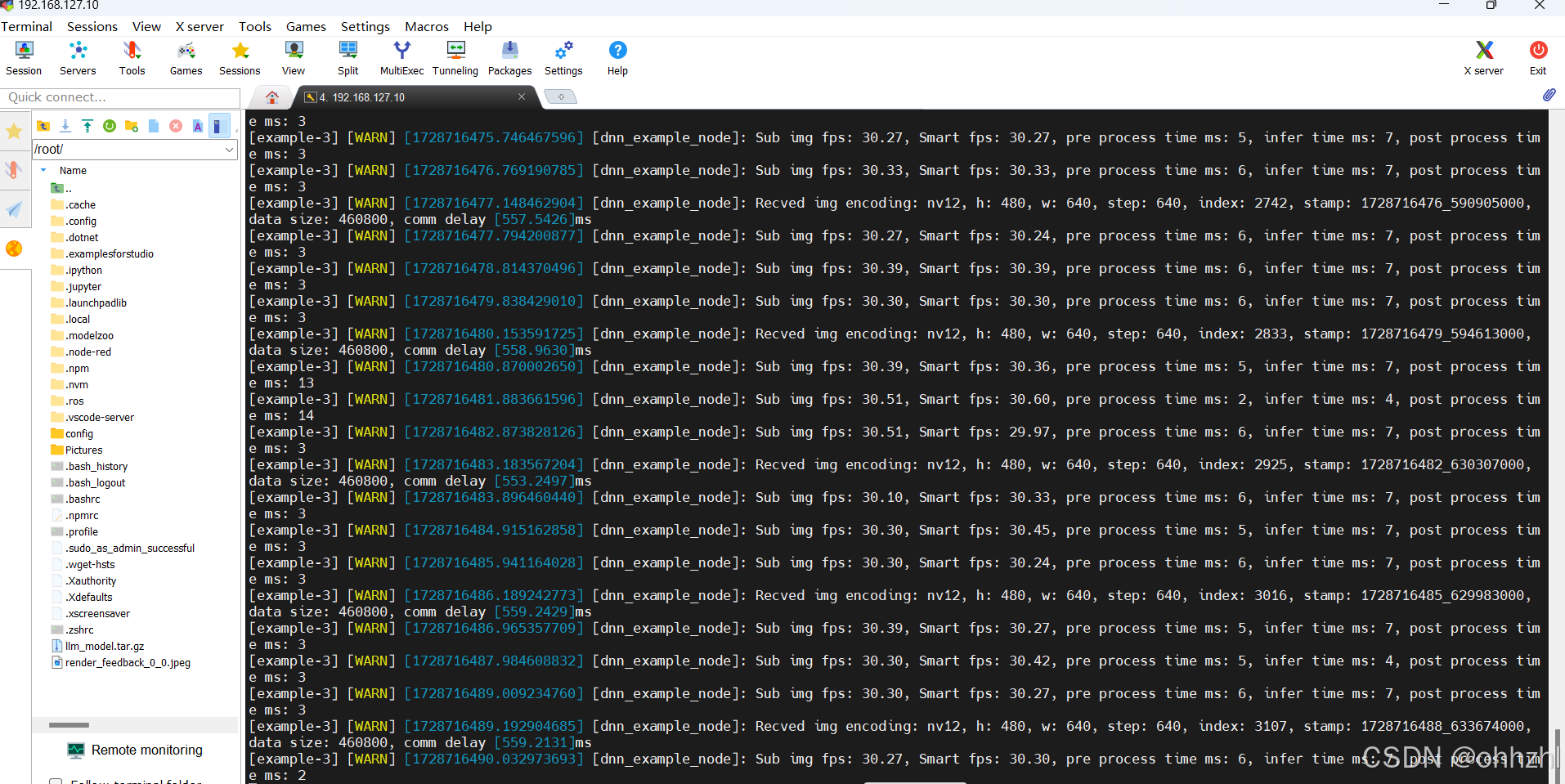
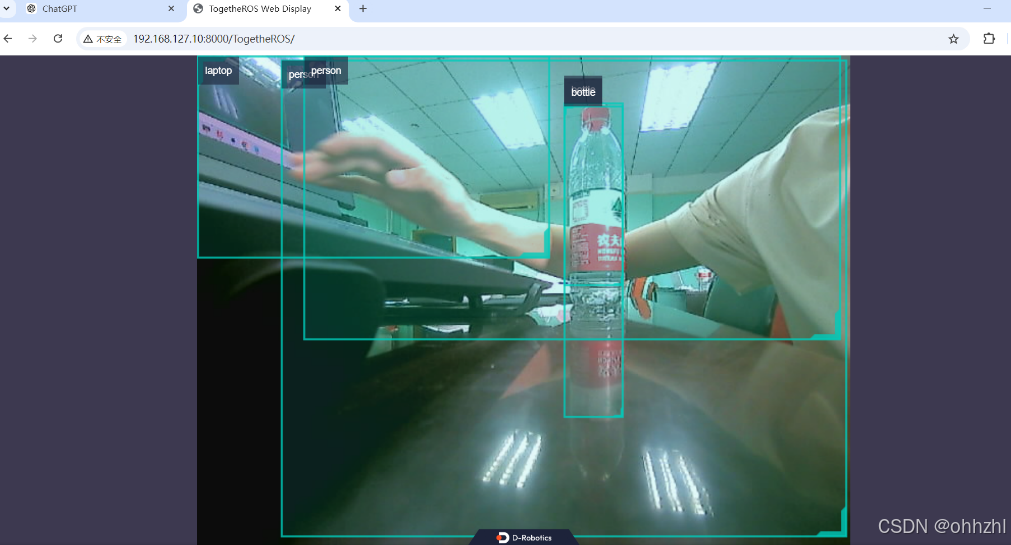
FCOS目标检测算法示例使用图片作为输入,利用BPU进行算法推理,发布包含目标类别和检测框的智能msg。这里我用的是USB摄像头发布图片,对于检测结果个人十分满意。该算法减少了预定义锚框的复杂性,不需要对锚框进行调整和优化。通过中心度(Centerness)来提高预测的准确性,避免噪声像素的干扰。与基于锚框的检测器不同,FCOS 不需要使用复杂的 Non-Maximum Suppression (NMS) 优化步骤。由于无锚框结构和单阶段设计,该算法的速度优势较为明显。以下两张图是我在测评时的画面。
(2)火山引擎大模型网关体验
按照该项目的教程我顺利完成了相关配置以及编译工作,我简单在命令行体验了一下,进行了基础对话,基本能够正确回答我所问出的问题。该模型也能对于后续用户的再次开发及应用提供很大便利。总体来说体验不错。
4、ModelZoo使用体验
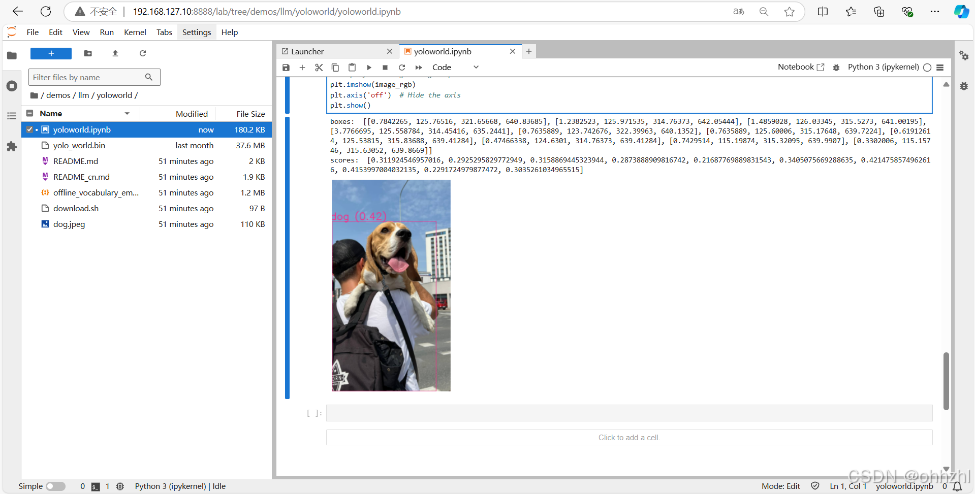
关于modelzoo我主要体验了两个算法:yoloworld和clip。YOLO-World 在 V100 上以 52.0 FPS 实现了 35.4 的 AP,超越了许多最新的先进方法,无论在准确性还是速度方面。此外,微调后的 YOLO-World 在多个下游任务中表现出色,包括目标检测和开放词汇实例分割。
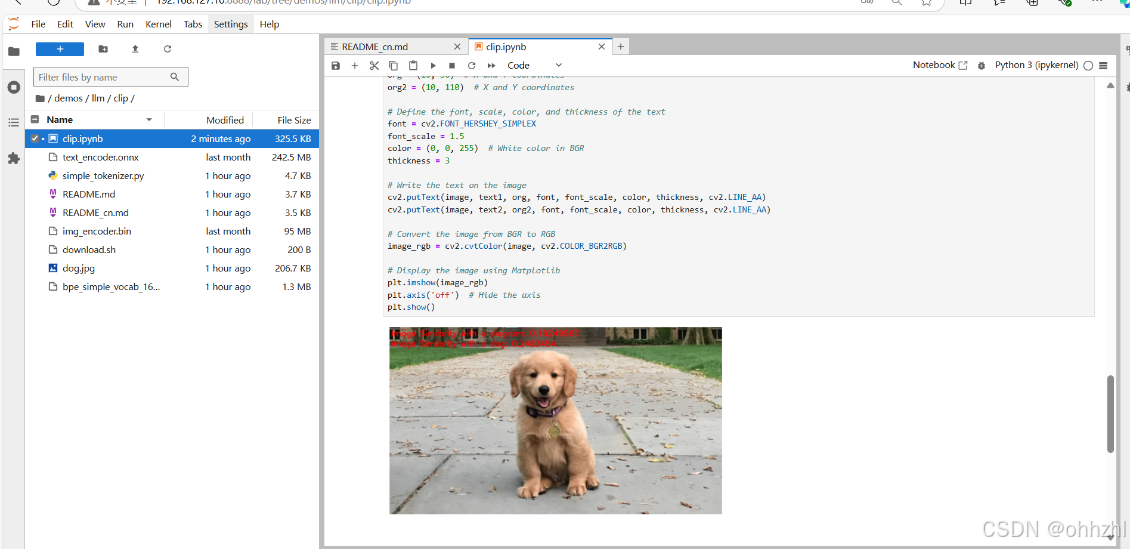
CLIP(Contrastive Language-Image Pre-training)是由OpenAI开发的一种多模态(文本和图像)预训练模型。CLIP模型通过学习如何对文本和图像进行对比,从而实现跨模态的理解。这种对比学习的方法使得CLIP能够在没有任何监督标签的情况下学习到文本和图像之间的语义关系。
由于我之前搞控制方向比较多,所以对AI、视觉、深度学习方面了解较少,这里就简单体验了一下,总体感觉很不错。

















 866
866

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









