







文章目录
前言
多年互联网从业背景,平时也有玩玩一些小主机,比如树莓派、J4125、斐讯N1和1L小主机之类的。这不又跻身机器人算法相关岗位,工作上开始接触到人工智能相关内容,目前是做ROS机械臂的运动规划算法相关。无意间逛了地瓜机器人论坛,发现新品X5要发布了,算力达10T,价格也不算过高,于是去古月居公众号下单了X5,便有了此文的起源。
二.开箱体验
不得不说,X5板卡尺寸、铜柱孔、排针和元器件排布的设计布局和做工十分精良,感觉就是对标树莓派5。另外,派5的散热外壳就可以直接用在X5上,不过CPU、内存与外壳的导热接触部分稍有错位,解决办法是加大垫高导热胶,这样就和外壳紧密接触达到理想散热了。下图是穿上派5带风扇外壳的X5:
| 板卡细节图 | |
|---|---|
 |  |
 |  |
 | content |
三.规格参数
 |
四.系统和驱动的安装
1. 系统的安装
- 准备至少8GB容量的Micro SD卡
- SD 读卡器
- 下载镜像烧录工具(本文用的是SD card formatter和win32DiskImager)
(1)打开SD card formatter对内存卡进行格式化
(2)打开win32DiskImager写入镜像文件
镜像下载地址:https://archive.d-robotics.cc/downloads/os_images/rdk_x5/
直接将下载好的压缩包解压,然后在win32DiskImager选中解压后的镜像文件,进行烧录。
2.连接Wi-Fi
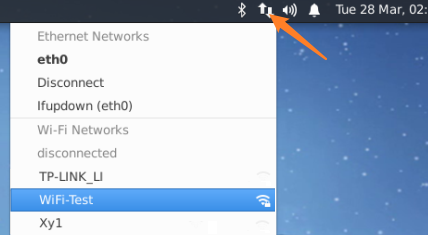
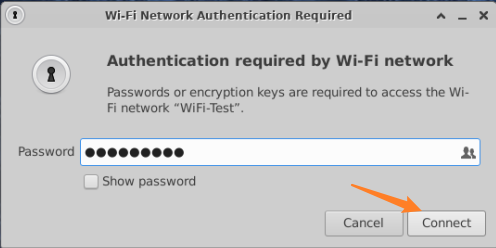
使用菜单栏右上角的Wi-Fi管理工具连接Wi-Fi,如下图所示,点击需要连接的Wi-Fi名,然后在弹出的对话框中输入Wi-Fi密码。
3. 双目深度相机的驱动安装(仅供深度相机Astra Pro Plus参考)
https://blog.csdn.net/joyopirate/article/details/130219247
参考这篇文章,使用的是Astra Pro Plus这一型号的单目结构光(红外投影),它本身的数据接口就是USB 2.0的。而奥比官方提供了两种SDK,其中OPENNI2 SDK(奥比中光AI开放平台|全球首个聚焦3D视觉开放平台 (orbbec.com.cn))这个库才能驱动我手上的这一款相机,而非Orbbec SDK
五.ROS应用简单测试
1.USB相机的应用
(1)环境准备
- USB 摄像头接入到开发板上,确认生成 /dev/videoX 设备节点,X 代表数字,例如 /dev/video0
- 通过 HDMI 线缆连接开发板和显示器


(2)运行命令
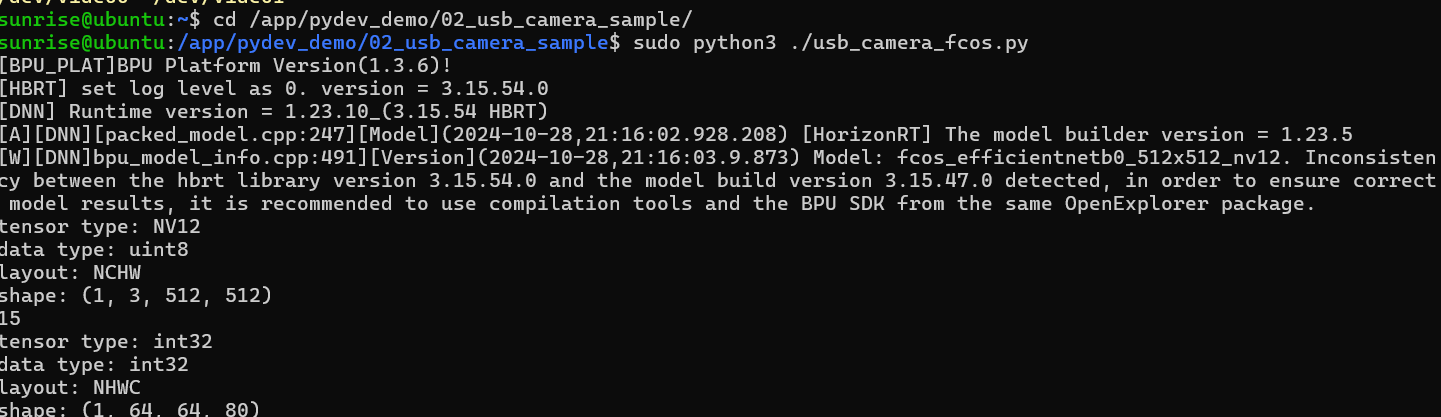
sunrise@ubuntu:~$ cd /app/pydev_demo/02_usb_camera_sample/
sunrise@ubuntu:/app/pydev_demo/02_usb_camera_sample$ sudo python3 ./usb_camera_fcos.py
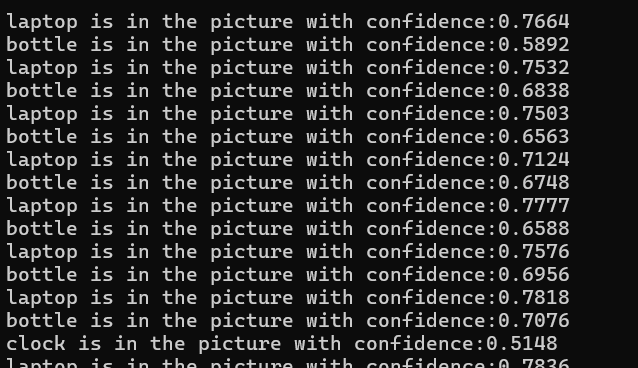
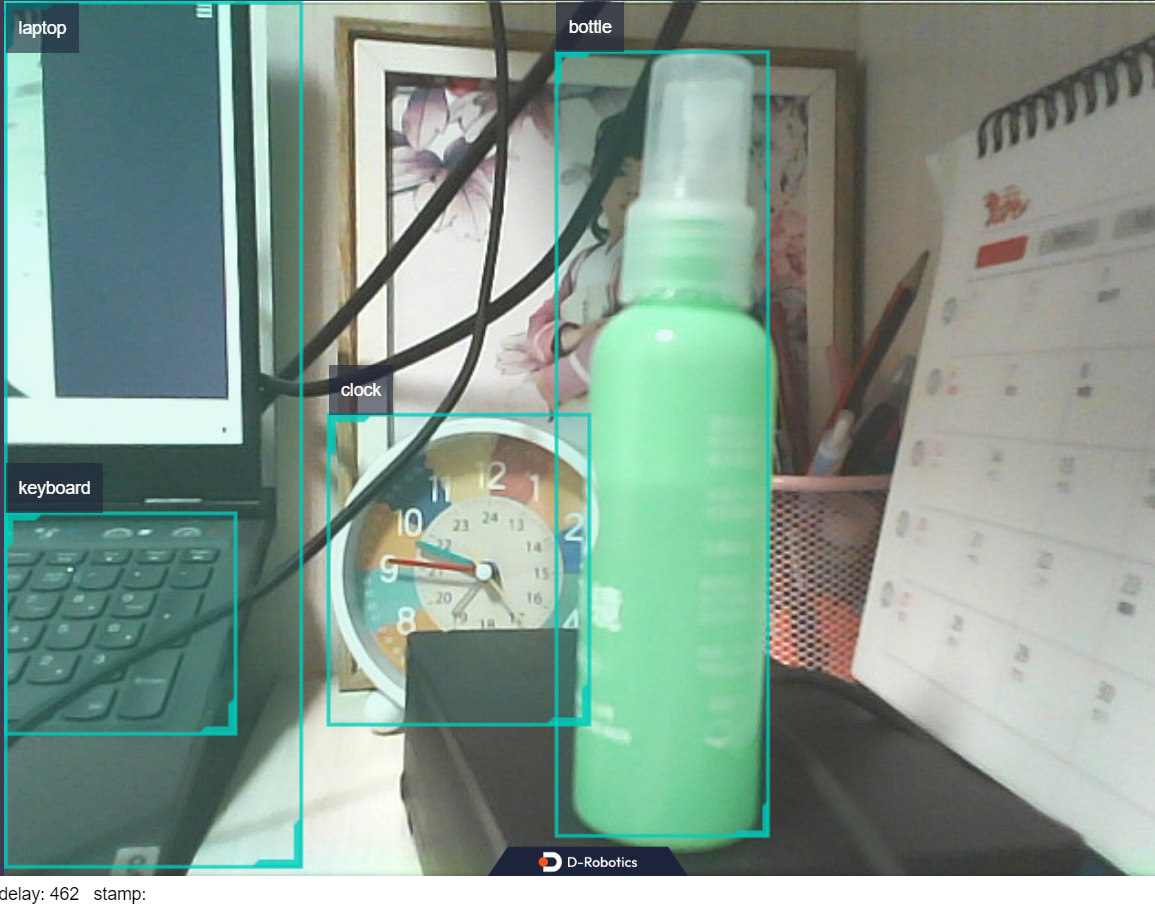
(3)预期效果
程序执行后,显示器会实时显示摄像头画面及目标检测算法的结果(目标类型、置信度),如下所示:
2.手势识别算法体验
准备工作
- RDK已烧录好Ubuntu 22.04系统镜像。
- RDK已成功安装TogetheROS.Bot。
- RDK已安装摄像头。
- 确认PC机能够通过网络访问RDK。
使用USB摄像头发布图片
# 配置tros.b环境
source /opt/tros/humble/setup.bash
# 从tros.b的安装路径中拷贝出运行示例需要的配置文件。
cp -r /opt/tros/humble/lib/mono2d_body_detection/config/ .
cp -r /opt/tros/humble/lib/hand_lmk_detection/config/ .
cp -r /opt/tros/humble/lib/hand_gesture_detection/config/ .
# 配置USB摄像头
export CAM_TYPE=usb
# 启动launch文件
ros2 launch hand_gesture_detection hand_gesture_detection.launch.py
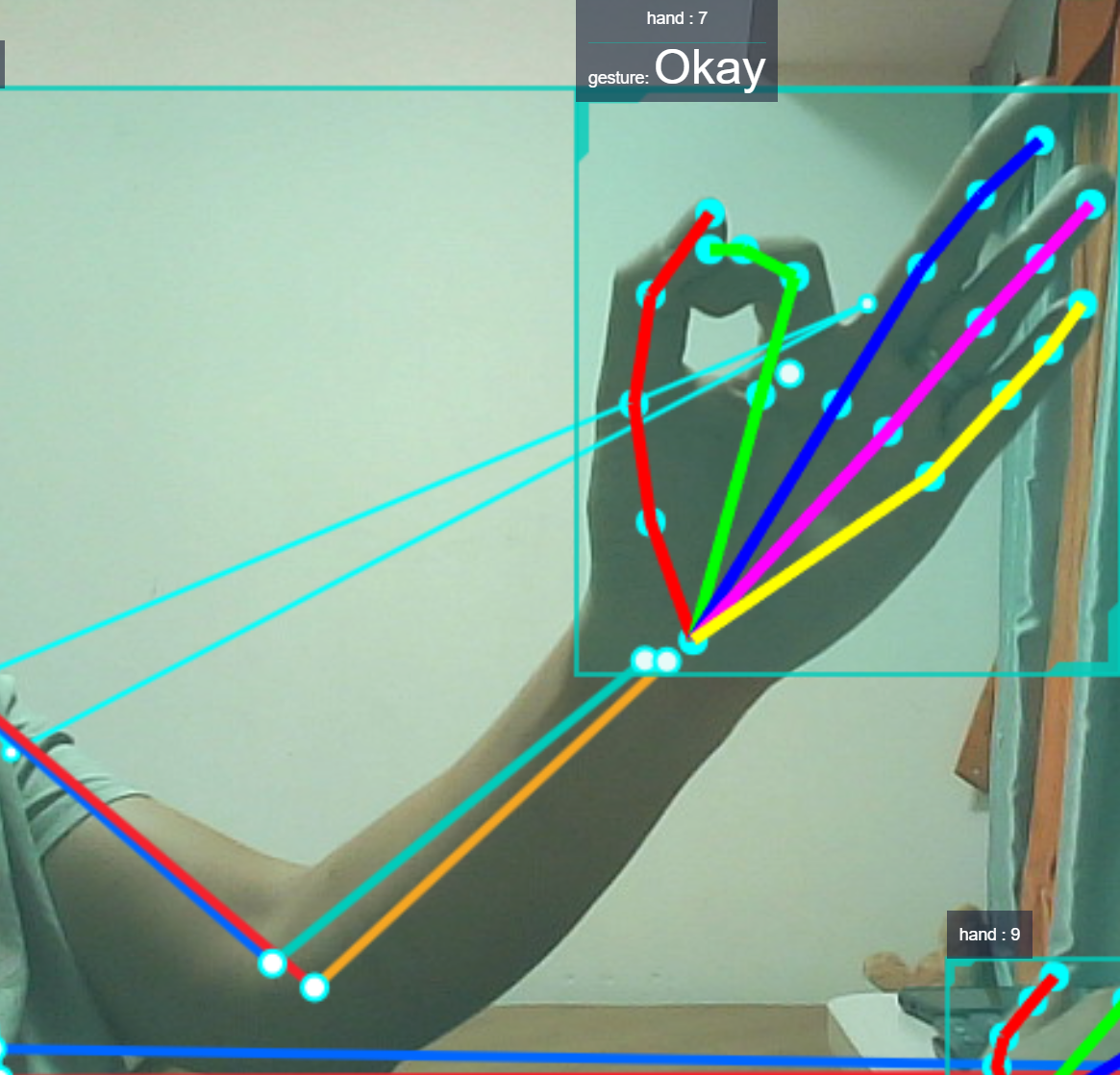
查看渲染效果
在PC端的浏览器输入http://IP:8000 即可查看图像和算法渲染效果(IP为RDK的IP地址):

















 472
472

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









