






本文将阐述了视差图转换成深度图及点云生成的过程。首先,通过读取视差图像数据,将视差图转换为深度图。利用相机参数和摄像机基线,将视差值映射为对应的深度值并输出深度图。然后,利用深度图像和彩色图像中的像素信息,生成三维点云。对每个像素,从彩色图像中获取颜色信息,并利用深度值和相机内参,将像素位置转换为三维坐标。最后,将生成的点云数据保存到文件中。
原理部分:
1.视差到深度的转换公式:
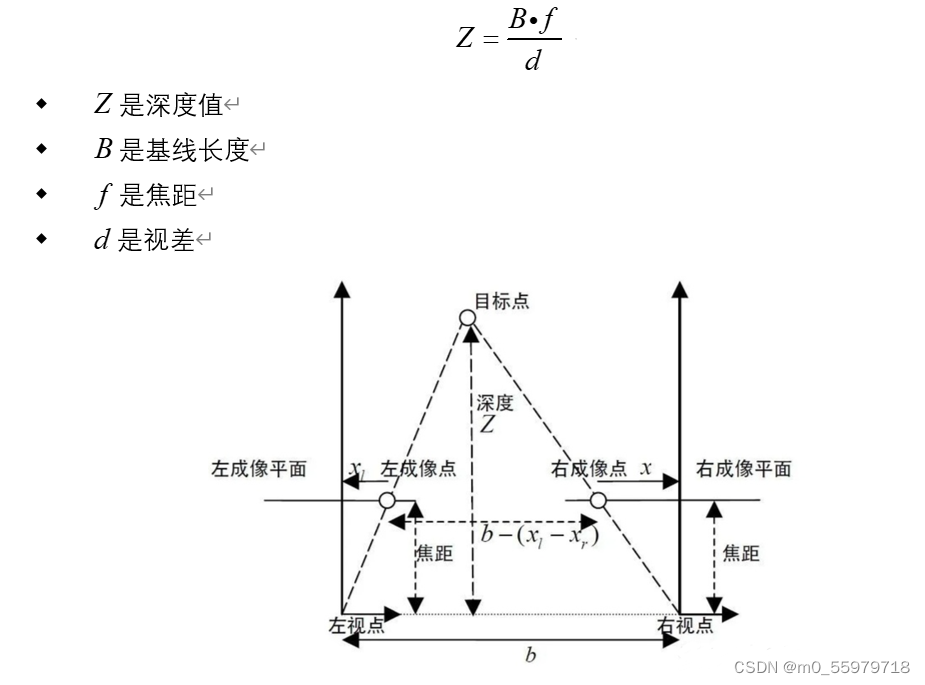
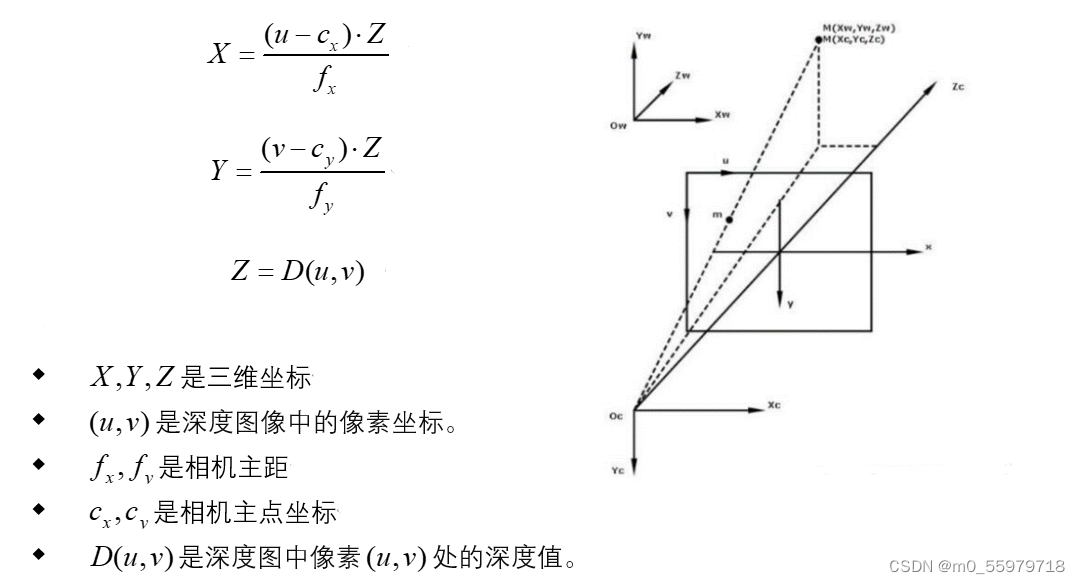
2.深度图中的像素转换为三维坐标:对于深度图中的每个像素,利用相机内参和深度值,可以将像素位置转换为相机坐标系下的三维坐标。这个过程可以使用以下公式进行
3.获取点云颜色信息:如果有彩色图像与深度图对应,可以根据深度图像中的像素坐标,从彩色图像中获取相应位置的像素颜色信息。
差图转深度图运行结果如下:
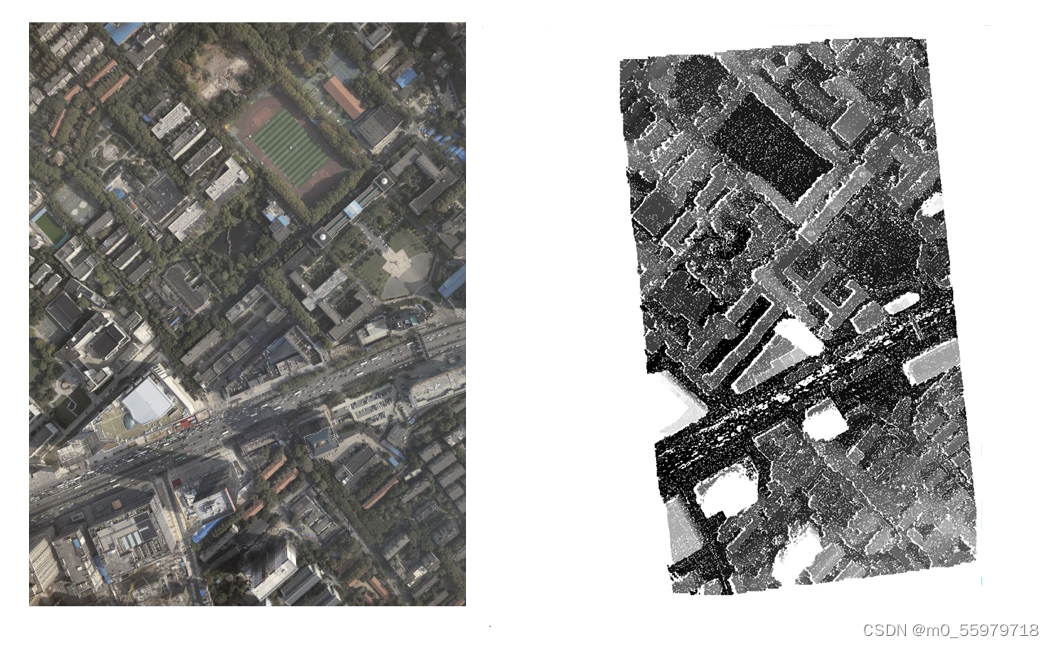
深度图转点云并赋色结果如下:

代码部分(Ubuntu系统下编译):
#include <iostream>
#include <fstream>
#include <opencv2/opencv.hpp>
#include "gdal/gdal_priv.h"
#pragma comment(lib, "gdal_i.lib")
#include <filesystem>
#include<tuple>
#include <gdal.h>
#include <gdal_priv.h>
#include <cpl_conv.h>
#include <boost/filesystem.hpp>
#include "gdal_priv.h"
#include "cpl_conv.h"
#include <pcl/point_cloud.h>
#include <pcl/point_types.h>
#include <pcl/io/ply_io.h>
#include <pcl/io/pcd_io.h>
using namespace std;
using namespace cv;
// Function to read data from a txt file and store it in a matrix
bool readDataFromFile(const string& filename, Mat& dataMat) {
ifstream file(filename);
if (!file.is_open()) {
cout << "Error: Could not open the file " << filename << endl;
return false;
}
dataMat.create(3, 4, CV_32FC1);
for (int i = 0; i < dataMat.rows; ++i) {
for (int j = 0; j < dataMat.cols; ++j) {
float value;
if (!(file >> value)) {
cout << "Error: Could not read data properly from the file " << filename << endl;
return false;
}
dataMat.at<float>(i, j) = value;
}
}
file.close();
return true;
}
// Function to convert disparity map to depth map
Mat disparityToDepth(cv::Mat disImg, float baselineLength, float focalLength) {
int width = disImg.cols;
int height = disImg.rows;
std::cout << "distance:" << width << height << std::endl;
Mat depthImage = Mat::zeros(height, width, CV_32FC1);
std::cout << "断点" << " 6 " << std::endl;
for (int row = 0; row < height; ++row)
{
// std::cout << "断点" << " 7 " << std::endl;
for (int col = 0; col < width; ++col)
{
float distance = 0;
distance = disImg.at<float>(row, col);
// std::cout << "distance:" << distance << std::endl;
if (distance != 0.0)
{
depthImage.at<float>(row, col) = (baselineLength * focalLength ) / distance;
}
else
{
continue;
}
}
}
return depthImage; // 返回深度图
}
std::vector<Mat> readEplimg(const std::string& folderPath)
{
GDALAllRegister();
CPLSetConfigOption("GDAL_FILENAME_IS_UTF8", "NO"); //设置支持中文路径和文件名
std::vector<Mat> Eplimg;
if (!boost::filesystem::exists(folderPath) || !boost::filesystem::is_directory(folderPath)) {
std::cerr << "Error: " << folderPath << " is not a valid directory." << std::endl;
return Eplimg;
}
// 遍历文件夹中的每个文件
boost::filesystem::directory_iterator end_itr;
for (boost::filesystem::directory_iterator itr(folderPath); itr != end_itr; ++itr) {
if (boost::filesystem::is_regular_file(itr->status()) &&
(itr->path().extension() == ".tiff" || itr->path().extension() == ".tif")) {
std::string filePath = itr->path().string();
// 打开tiff文件
GDALDataset* poDataset = (GDALDataset*)GDALOpenShared(filePath.c_str(), GA_ReadOnly);
if (poDataset == nullptr) {
std::cerr << "Error opening image " << filePath << std::endl;
continue;
}
// 获取图像宽度和高度
int width = poDataset->GetRasterXSize();
int height = poDataset->GetRasterYSize();
// 获取波段数量
int numBands = poDataset->GetRasterCount();
// 读取图像数据
cv::Mat image(height, width, CV_16U);
//poDataset->RasterIO(GF_Read, 0, 0, width, height, image.data, width, height, GDT_UInt16, 0, 0);
GDALRasterBand* poBand = poDataset->GetRasterBand(1);
poBand->RasterIO(GF_Read, 0, 0, width, height, image.data, width, height, GDT_UInt16, 0, 0);
// 关闭文件
GDALClose(poDataset);
// 将图像添加到向量中
Eplimg.push_back(image);
}
}
return Eplimg;
}
cv::Mat readDisparityImage(const std::string& filePath) {
GDALAllRegister();
// 打开 TIFF 文件
GDALDataset *disparityDataset = (GDALDataset *)GDALOpen(filePath.c_str(), GA_ReadOnly);
if (disparityDataset == NULL) {
std::cerr << "无法打开图像文件!" << std::endl;
return cv::Mat();
}
// 获取图像宽度和高度
int width = disparityDataset->GetRasterXSize();
int height = disparityDataset->GetRasterYSize();
std::cout << "图像尺寸:" << width << " x " << height << std::endl;
// 获取第一个波段
// GDALRasterBand *poBand = disparityDataset->GetRasterBand(1);
// 获取波段数量
int numBands = disparityDataset->GetRasterCount();
// 读取图像数据
cv::Mat image(height, width, CV_32FC1);
GDALRasterBand* poBand = disparityDataset->GetRasterBand(1);
GDALDataType g_type = poBand->GetRasterDataType();
// std::cout << "断点" << width << " 1 " << height << std::endl;
// float *data = new float [width * height];
// std::cout << "断点" << width << " 2 " << height << std::endl;
// poBand->RasterIO(GF_Read, 0, 0, width, height, data, width, height, GDT_Float64, 0, 0);
std::cout << "断点" << width << " 3 " << height << std::endl;
// 将数据转换为 OpenCV 的 cv::Mat 格式
// cv::Mat img(height, width, CV_64F, data);
disparityDataset->GetRasterBand(1)->RasterIO(GF_Read, 0, 0, width, height, image.data, width, height, g_type, 0, 0);
poBand->RasterIO(GF_Read, 0, 0, width, height, image.data, width, height, g_type, 0,0);
std::cout << "断点" << width << " 4 " << height << std::endl;
// 释放内存
// delete[] data;
GDALClose(disparityDataset);
return image;
}
std::vector<cv::Mat> readColorImages(const std::string& folderPath)
{
GDALAllRegister();
CPLSetConfigOption("GDAL_FILENAME_IS_UTF8", "NO"); //设置支持中文路径和文件名
std::vector<cv::Mat> colorImg;
if (!boost::filesystem::exists(folderPath) || !boost::filesystem::is_directory(folderPath)) {
std::cerr << "Error: " << folderPath << " is not a valid directory." << std::endl;
return colorImg;
}
boost::filesystem::directory_iterator end_itr;
for (boost::filesystem::directory_iterator itr(folderPath); itr != end_itr; ++itr) {
if (boost::filesystem::is_regular_file(itr->status()) &&
(itr->path().extension() == ".tiff" || itr->path().extension() == ".tif")) {
std::string filePath = itr->path().string();
GDALDataset* poDataset = (GDALDataset*)GDALOpenShared(filePath.c_str(), GA_ReadOnly);
if (poDataset == nullptr) {
std::cerr << "Error opening image " << filePath << std::endl;
continue;
}
int width = poDataset->GetRasterXSize();
int height = poDataset->GetRasterYSize();
int numBands = poDataset->GetRasterCount();
// 创建一个3通道的Mat矩阵
cv::Mat image(height, width, CV_8UC3);
// 逐波段读取数据并存储到Mat矩阵中
for (int b = 1; b <= std::min(numBands, 3); ++b) { // 限制最多读取前3个波段
GDALRasterBand* poBand = poDataset->GetRasterBand(b);
poBand->RasterIO(GF_Read, 0, 0, width, height, image.data + (b - 1), width, height, GDT_Byte, 3, width * 3);
}
// 关闭文件
GDALClose(poDataset);
// 将图像添加到向量中
cv::cvtColor(image, image, cv::COLOR_RGB2BGR); // 转换为BGR格式
colorImg.push_back(image);
}
}
return colorImg;
}
void saveDepthImageWithGDAL(const cv::Mat& depthImage, const std::string& outputPath) {
// 初始化 GDAL 库
GDALAllRegister();
// 获取深度图像的尺寸信息
int width = depthImage.cols;
int height = depthImage.rows;
// 创建输出文件
GDALDriver* driver = GetGDALDriverManager()->GetDriverByName("GTiff");
if (driver == nullptr) {
std::cerr << "Error: Could not get GDAL driver." << std::endl;
return;
}
// 创建输出数据集
GDALDataset* dataset = driver->Create(outputPath.c_str(), width, height, 1, GDT_Float32, NULL);
if (dataset == nullptr) {
std::cerr << "Error: Could not create GDAL dataset." << std::endl;
return;
}
// 将深度图像数据写入到数据集中
float* data = (float*)CPLMalloc(sizeof(float) * width * height);
for (int i = 0; i < height; ++i) {
for (int j = 0; j < width; ++j) {
data[i * width + j] = depthImage.at<float>(i, j);
}
}
GDALRasterBand* band = dataset->GetRasterBand(1);
band->RasterIO(GF_Write, 0, 0, width, height, data, width, height, GDT_Float32, 0, 0);
// 释放内存和关闭数据集
CPLFree(data);
GDALClose(dataset);
}
void depthToCloudPoint(std::vector<Mat>colorImage,Mat depthImage ,float focalLength_x,float focalLength_y)
{
pcl::PointCloud<pcl::PointXYZRGB>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZRGB>);
std::cout << "size:" << depthImage.rows << "x" << depthImage.cols << std::endl;
for (int y = 0; y < depthImage.rows; ++y) {
for (int x = 0; x < depthImage.cols; ++x) {
if (y >= 0 && y < depthImage.rows && x >= 0 && x < depthImage.cols) {
// 获取深度值
float depth = depthImage.at <float>(y, x);
// 如果深度值为0(无效值),跳过
if (depth == 0.0f)
continue;
// 计算点云位置
pcl::PointXYZRGB point;
point.z = depth;
point.x = (x - focalLength_x) * depth / focalLength_x;
point.y = (y - focalLength_y) * depth / focalLength_y;
std::cout << "size:" << "9" << std::endl;
//std::cout << "color:" << colorImage << std::endl;
// 获取相应位置的彩色像素值作为颜色
cv::Vec3b color = colorImage[0].at<cv::Vec3b>(y, x);
std::cout << "color:" << color << std::endl;
point.r = color[2];
point.g = color[1];
point.b = color[0];
std::cout << "color:" << color << std::endl;
// 将点添加到点云中
cloud->push_back(point);
}
}
}
pcl::io::savePLYFile("pointcloud.ply", *cloud);
pcl::io::savePCDFileBinary("point_cloud.pcd", *cloud);
pcl::io::savePLYFileBinary("point_cloud.ply", *cloud);
std::cout << "Point cloud saved to point_cloud.ply" << std::endl;
}
int main() {
std::vector<Mat> Eplimg = readEplimg("/home/tl/3rdparty/homeworks/build/EpiImg");
std::vector<Mat> colorImage = readColorImages("/home/tl/3rdparty/homeworks/build/EpiImg");
cv::Mat disImg = readDisparityImage("/home/tl/3rdparty/homeworks/build/017ER030_017ER031_DISP_ET0.tif");
// 检查是否成功读取
if (disImg.empty()) {
std::cerr << "图像读取失败!" << std::endl;
}
Mat dataMatleft, dataMatright;
if (!readDataFromFile("017ER030_REC.txt", dataMatleft) || !readDataFromFile("017ER031_REC.txt", dataMatright)) {
return -1;
}
Mat K1, R1, t1, K2, R2, t2;
decomposeProjectionMatrix(dataMatleft, K1, R1, t1);
decomposeProjectionMatrix(dataMatright, K2, R2, t2);
Mat B = t1 - t2;
float baseline_length = norm(B);
float focalLength_x = K1.at<float>(0, 0); // 从相机内参矩阵K1中获取水平方向的焦距
cout << "基线长度: " << baseline_length << endl;
cout << "焦距: " << focalLength_x << endl;
std::cout << "断点" << " 5 " << std::endl;
// 或者
float focalLength_y = K1.at<float>(1, 1); // 从相机内参矩阵K1中获取垂直方向的焦距
Mat depthImage = disparityToDepth(disImg, baseline_length, focalLength_x); // 调用 disparityToDepth 函数获取深度图
// 设置输出路径
std::string outputPath = "output_depth_image.tif";
// 将深度图像保存为图片文件
saveDepthImageWithGDAL(depthImage, outputPath);
// 调用函数进行深度图像到点云的转换
depthToCloudPoint(colorImage, depthImage, focalLength_x, focalLength_y);
cout << "基线长度: " << baseline_length << endl;
cout << "相机内参矩阵 K:" << endl << K1 << endl;
cout << "旋转矩阵 R:" << endl << R1 << endl;
cout << "平移向量 t:" << endl << t1 << endl;
cout << "Data matrix 1:" << endl << dataMatleft << endl;
cout << "Data matrix 2:" << endl << dataMatright << endl;
return 0;
}
















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









