







小海龟案例
开启三个终端,分别运行以下命令,鼠标停留在第三个终端,就可以通过键盘方向键控制小海龟移动:
roscore
rosrun turtlesim turtlesim_node
rosrun turtlesim turtle_teleop_key
ROS的话题机制
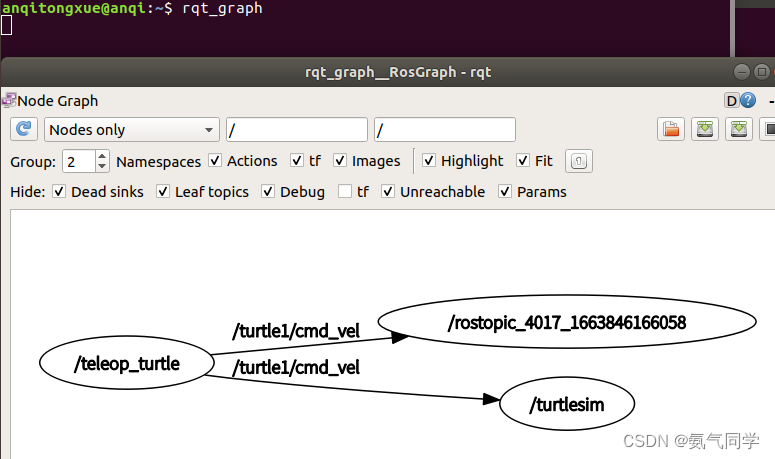
使用rqt_graph查看目前节点的运行关系,可以看到,turtlesim_node和turtle_teleop_key节点正通过一个名为/turtle1/command_velocity的话题来相互通信

rostopic相关命令
可以通过 rostopic -h 查看命令详细信息

rostopic echo
rostopic echo可以查看某个话题上发布的数据,在本案例中,可以查看turtle_teleop_key节点发布的“指令、速度”数据,如果没有信息,是因为现在还没有数据被发布到该话题上。可以通过按下键盘方向键让turtle_teleop_key节点发布数据:

再次使用rqt_graph命令,可以看到rostopic echo也订阅了该节点
rostopic list
使用 rostopic list -h 查看list子命令需要的参数

rostopic list -v会列出所有发布和订阅的主题及其类型的详细信息

ROS消息
使用命令可以查看发布在话题上的消息的类型
rostopic type [topic]
rosmsg show geometry_msgs/Twist使用第二行命令可以查看消息的详细信息

rostopic pub
使用rostopic pub可以把消息发送到某个话题上,用法为
rostopic pub [topic] [msg_type] [args]使用rostopic pub -h 来查看命令的详细用法:-r 设置发布频率,-1 发布一次

使用命令让小海龟运动,其中两个破折号是用来告诉选项解析器,表明之后的参数都不是选项。如果参数前有破折号(-)比如负数,那么这是必需的
rostopic pub /turtle1/cmd_vel geometry_msgs/Twist -r 1 -- '[2.0, 0.0, 0.0]' '[0.0, 0.0, -1.8]'在新终端使用命令 rqt_graph ,查看当前节点关系

rqt_plot
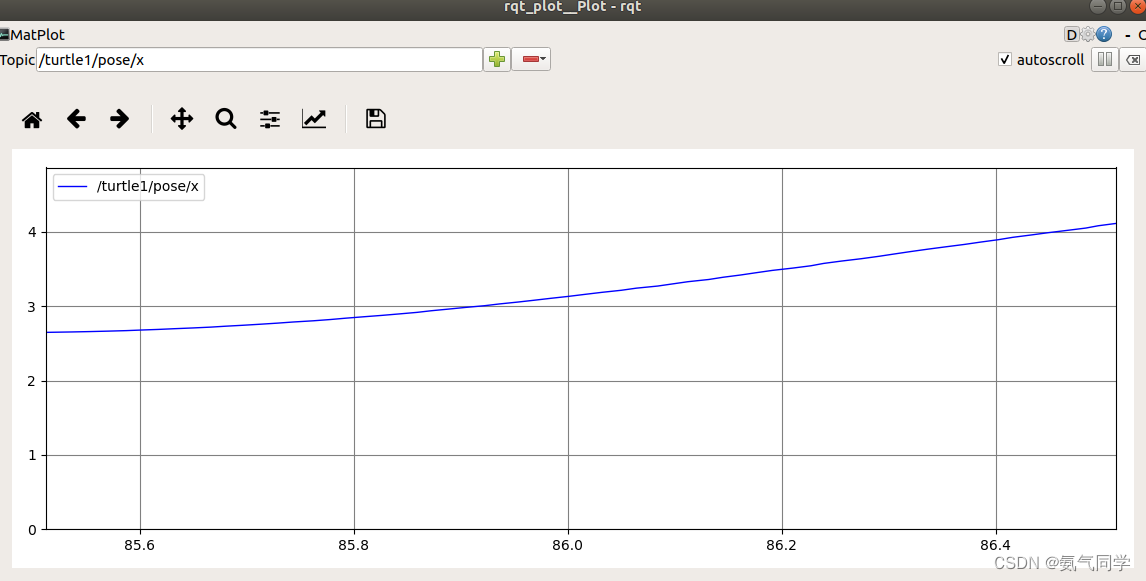
rqt_plot命令可以在滚动时间图上显示发布到某个话题上的数据。这里我们将使用rqt_plot命令来绘制正被发布到/turtle1/pose话题上的数据
rosrun rqt_plot rqt_plot在弹出来的窗口里的Topic栏里输入/turtle1/pose/x,就可以turtle的x位置的变化规律














 4086
4086











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









