






官方教程是最好的老师 http://wiki.ros.org/cn
节点是ROS软件包中的一个可执行文件。ROS节点使用ROS客户端库与其他节点通信。节点可以发布或订阅话题,也可以提供或使用服务。
打开一个终端,输入roscore,再打开一个终端,输入rosnode list,得到以下输出:

可以使用rosnode info 查看节点信息:

使用其他节点
rosrun [package_name] [node_name]通过rosrun命令启动节点,例如要运行turtlesim包中的turtlesim_node,可以使用以下命令(先在一个终端里运行roscore):
rosrun turtlesim turtlesim_node得到:

在新终端中运动rosnode list:

重命名节点
使用以下命令来重命名节点
rosrun turtlesim turtlesim_node __name:=my_turtle在另一个终端输入rosnode list ,可以看到节点名字变为了/my_turtle
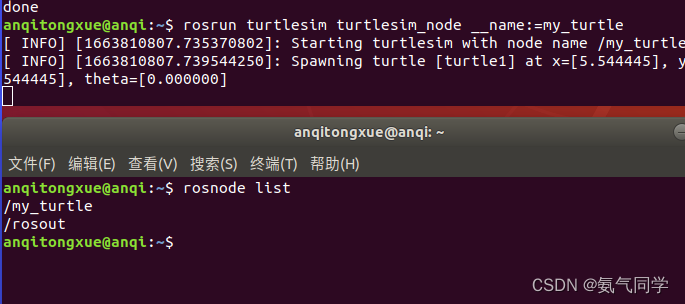
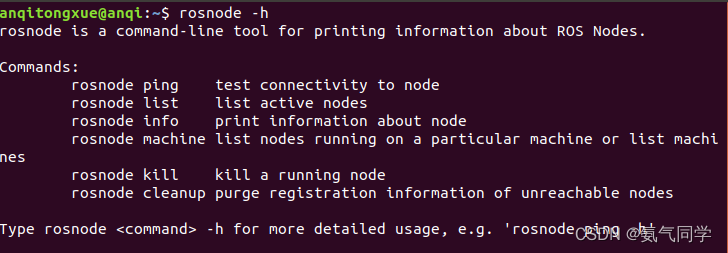
节点相关命令及用法,可以使用rosnode -h查看
使用 rqt_graph 来查看运行中的节点
















 5062
5062











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









