






✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
⛄ 内容介绍
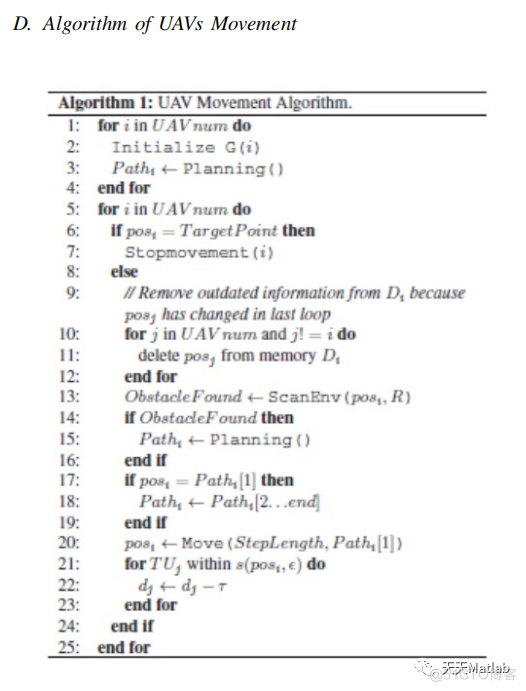
空中无人机(UAVs)作为网络处理器在移动网络中长期使用,但它们现在被用作移动边缘计算(MEC)中的移动服务器。由于它们的灵活性、便携性、强大的视线通信联系和低成本、可改变的使用,它们在研究和商业应用中变得更加流行。更广泛的民用服务现在可能被这些重要的特征所支持,包括运输和工业监测和农业,以及森林和有线服务。本项目研究了基于无人飞行器的移动计算网络,无人飞行器(UAV)进行计算,移动终端用户向其提供计算。为了确保每个终端用户的服务质量(QoS),无人飞行器根据移动终端用户的位置动态选择其路线。

⛄ 部分代码
function PATH = planning(i,initial_pos,E_matrix)
global TARGET;
global TU_demand_matrix;
global UAVnum;
global G;
global N;
global EPISOD_SUM;
global K;
global M;
G_ori=G; % store G
% PATH= planning(G{i},round(UAV_pos(i,:)*N),TARGET,E_matrix,TU,N,EPISOD_SUM,K,M);
%% initialize G with all elements are N^2 and target 0
% add the following lines then G will be refreshed in each planning
for j=1:UAVnum
G{j}=ones(N,N)*N^2;
G{j}(TARGET(1),TARGET(2))=0;
end
%% update G matrix
node=TARGET;
for t=1:EPISOD_SUM % while in max iteration num
% invoke dangerMatrx.m to return a weight matrix A
A=dangerMatrix(node,E_matrix);
G{i}=min(G{i},G{i}(node(1),node(2))+A); % a reward matrix to update G to find most minimum element
node=randi(N,1,2); %randomly find 1*2 int matrix range(0,N)
end
% every element in G is the minimum value to that position
%% calculate PATH by W
step=1;
s=initial_pos;
PATH=[];
G_tmp=G{i};
while(~isequal(s,TARGET) && step<N*2) % continue to planning as long as UAV hasn't arrived at target or step<2N
step=step+1;
%% revised
cost_add=dangerMatrix(s,E_matrix);
W2=G_tmp+cost_add;
[row_index,column_index]=find(W2==min(min(W2))); % find min element in W2
% there might be 1+ minium, so use row_index(1)
row_index=row_index(1);
column_index=column_index(1);
s=[row_index,column_index];
G_tmp(row_index,column_index)=N^2;
% prevent deadlock in PATH
if(~isempty(PATH)&&ismember(s,PATH,'rows'))
continue;
else
PATH=cat(1,PATH,s);
end
%% original
% A2=dangerMatrix(s,E_matrix);
% W2=G{i}+A2;
% W2(s(1),s(2))=abs(min(min(W2))*1.5); %make sure s value is not minimum in W2
% [a,b]=min(W2); %find min element in W2 and assign the column and row to s(1) and s(2)
% [~,d]=min(a);
% s(1)=b(d);
% s(2)=d;
% PATH=cat(1,PATH,s); %add new s position to TRACE
end
G=G_ori; % restore G
end
⛄ 运行结果

⛄ 参考文献
[1] Wang L , Wang K , Pan C , et al. Multi-Agent Deep Reinforcement Learning-Based Trajectory Planning for Multi-UAV Assisted Mobile Edge Computing[J]. IEEE, 2021(1).















 2700
2700











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









