







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,
代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
1. 概述
近年来,随着自动驾驶技术的发展,对车辆控制系统的要求也越来越高。模型预测控制(MPC)是一种先进的控制方法,它可以预测系统未来的状态,并根据预测结果来计算控制输入,从而使系统达到最佳的控制效果。MPC控制在自动驾驶领域有着广泛的应用,例如车道保持、避障、轨迹跟踪等。
2. 线性MPC控制
线性MPC控制是一种基于线性模型的MPC控制方法。它假设系统是一个线性时不变系统,并使用线性模型来预测系统未来的状态。线性MPC控制的优点是计算量小,易于实现。
3. 基于线性MPC实现低曲率道路车道保持和避障
在低曲率道路上,车辆的行驶状态可以近似为线性。因此,可以使用线性MPC控制来实现车道保持和避障。
3.1 车道保持
车道保持是指车辆在低曲率道路上保持在车道中心行驶。可以使用线性MPC控制来实现车道保持。具体步骤如下:
-
建立车辆的线性模型。
-
定义车道保持的控制目标。
-
设计线性MPC控制器。
-
将线性MPC控制器应用于车辆控制系统。
3.2 避障
避障是指车辆在低曲率道路上避开障碍物行驶。可以使用线性MPC控制来实现避障。具体步骤如下:
-
建立车辆和障碍物的线性模型。
-
定义避障的控制目标。
-
设计线性MPC控制器。
-
将线性MPC控制器应用于车辆控制系统。


📣 部分代码
function [f_x_TV, v_x_TV, TV_x] = CreateObstacle(Obstacles, T_sampling)f_x_TV = [];v_x_TV = [];TV_x = cell(size(Obstacles));for obs = 1:length(Obstacles)obstacle = Obstacles(obs);if mean(obstacle.width) < 0f_x_TV = [f_x_TV;0 0 0 -1 0]; % e_yv_x_TV = [v_x_TV;-max(obstacle.width)];elsef_x_TV = [f_x_TV;0 0 0 1 0]; % e_yv_x_TV = [v_x_TV;min(obstacle.width)];endTV_x{obs} = obstacle.duration(1)/T_sampling:obstacle.duration(2)/T_sampling;endend
⛳️ 运行结果
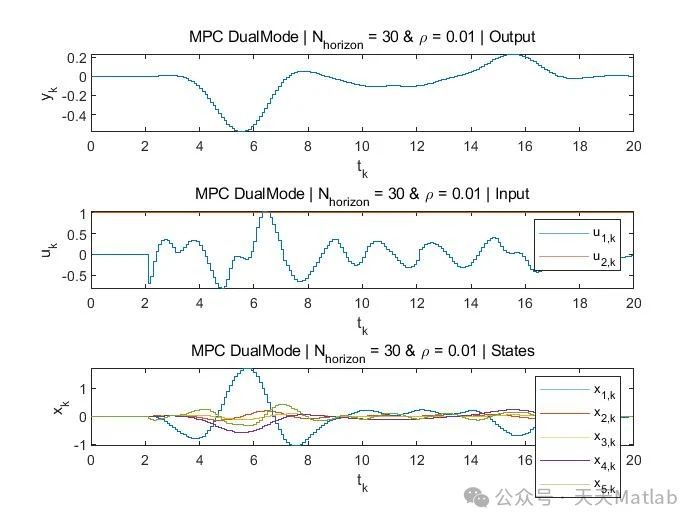
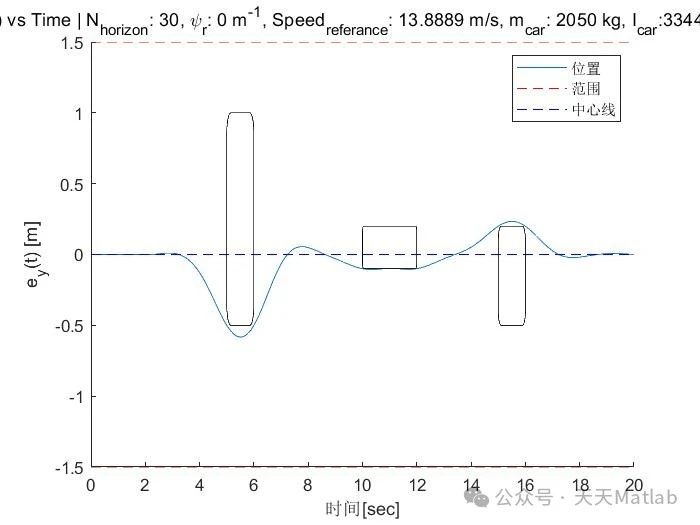
4. 仿真结果
为了验证基于线性MPC实现低曲率道路车道保持和避障的有效性,进行了仿真实验。仿真结果表明,基于线性MPC的车道保持和避障控制器能够有效地使车辆在低曲率道路上保持在车道中心行驶,并避开障碍物。
5. 结论
基于线性MPC实现低曲率道路车道保持和避障是一种有效的方法。它能够使车辆在低曲率道路上保持在车道中心行驶,并避开障碍物。线性MPC控制的优点是计算量小,易于实现。因此,它是一种很有前途的自动驾驶控制方法。
🔗 参考文献
[1] 朱愿.基于视觉和雷达的智能车辆自主换道决策机制与控制研究[D].解放军军事医学科学院;中国人民解放军军事医学科学院,2014.DOI:10.7666/d.Y2748116.
[2] 杨雷;马泽宇;李盛;张云清;.基于MPC的自动驾驶汽车主动避障运动控制研究[C]//第十届全国多体动力学与控制暨第五届全国航天动力学与控制学术会议论文摘要集.2017.















 478
478











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









