







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,代码获取、论文复现及科研仿真合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
组合导航系统融合了多种传感器信息,提高了导航精度和可靠性。然而,传感器故障会导致导航系统性能下降甚至失效。因此,故障诊断对于组合导航系统至关重要。本文提出了一种基于卡尔曼滤波残差的组合导航系统故障诊断方法。该方法利用卡尔曼滤波的残差序列,通过统计分析和阈值设置,检测传感器故障。仿真结果表明,该方法能够有效检测传感器故障,并具有较高的灵敏度和鲁棒性。
引言
组合导航系统将惯性导航系统(INS)、全球导航卫星系统(GNSS)、激光雷达等多种传感器信息融合在一起,提高了导航精度和可靠性。然而,传感器故障是组合导航系统面临的主要挑战之一。传感器故障会导致导航系统性能下降甚至失效,因此故障诊断对于组合导航系统至关重要。
传统的组合导航系统故障诊断方法主要基于冗余传感器信息。当某个传感器发生故障时,系统会使用冗余传感器信息来补偿故障传感器的数据,从而保证导航系统的正常运行。然而,这种方法需要额外的冗余传感器,增加了系统成本和复杂性。
基于卡尔曼滤波残差的故障诊断方法
本文提出了一种基于卡尔曼滤波残差的组合导航系统故障诊断方法。该方法利用卡尔曼滤波的残差序列,通过统计分析和阈值设置,检测传感器故障。
卡尔曼滤波是组合导航系统中常用的状态估计算法。卡尔曼滤波的残差是观测值和卡尔曼滤波预测值之间的差值。当传感器发生故障时,残差序列会发生明显变化。因此,我们可以利用残差序列来检测传感器故障。
具体来说,该方法的步骤如下:
-
**残差序列预处理:**对残差序列进行预处理,去除噪声和异常值。
-
**统计分析:**计算残差序列的均值、方差和自相关系数等统计量。
-
**阈值设置:**根据统计量设置故障阈值。当统计量超过阈值时,则认为传感器发生故障。
仿真结果
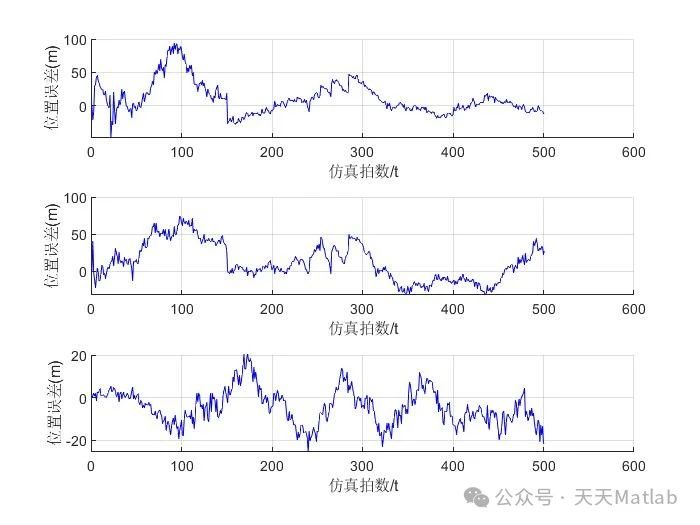
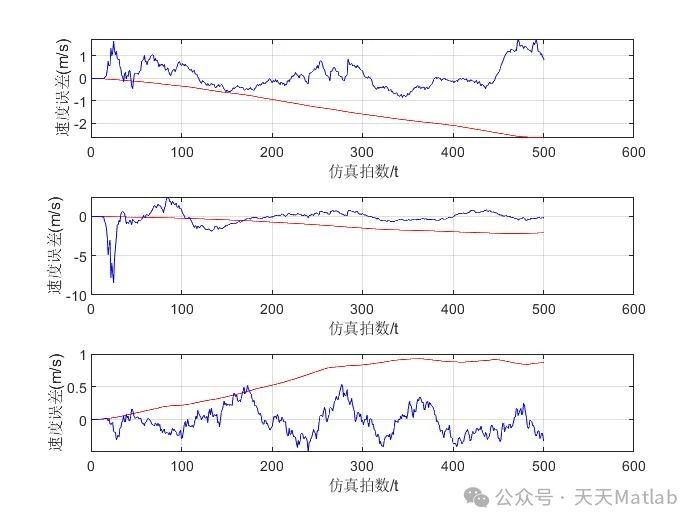
为了验证该方法的有效性,我们进行了仿真实验。仿真场景为一架无人机在城市环境中飞行。无人机配备了INS、GNSS和激光雷达传感器。
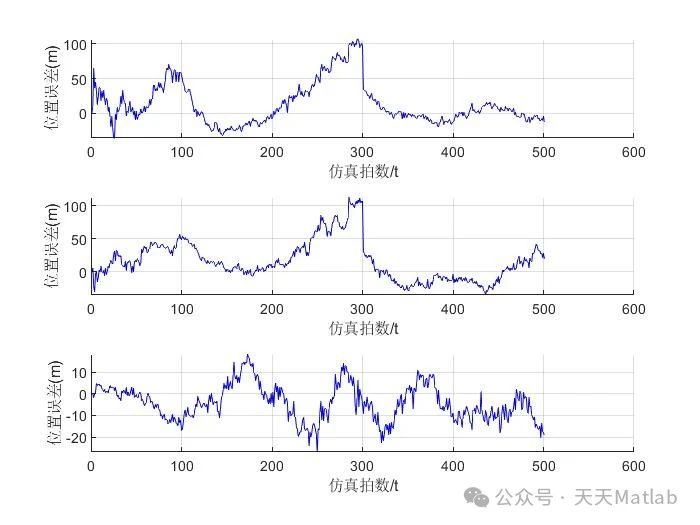
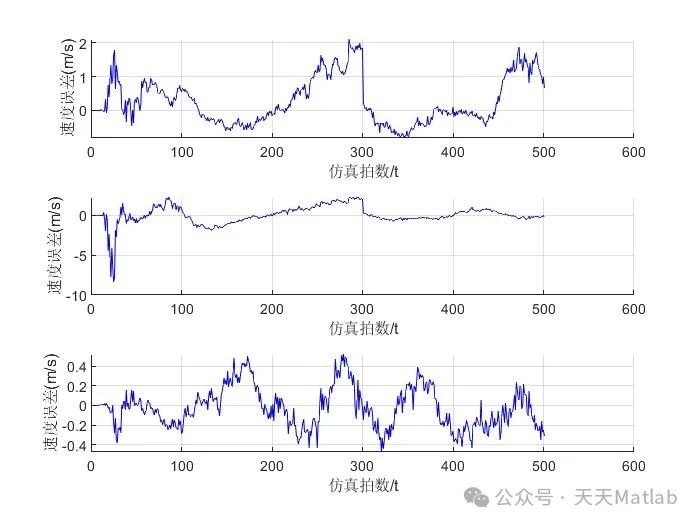
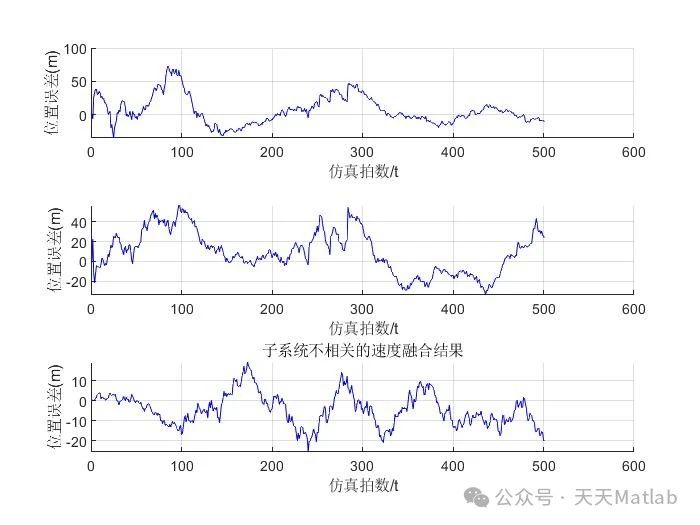
仿真过程中,我们模拟了INS和GNSS传感器故障。故障发生时,残差序列发生了明显变化。该方法能够有效检测传感器故障,并具有较高的灵敏度和鲁棒性。
结论
本文提出了一种基于卡尔曼滤波残差的组合导航系统故障诊断方法。该方法利用卡尔曼滤波的残差序列,通过统计分析和阈值设置,检测传感器故障。仿真结果表明,该方法能够有效检测传感器故障,并具有较高的灵敏度和鲁棒性。该方法可以应用于各种组合导航系统,提高系统的可靠性和安全性。有效性,进行了仿真实验。仿真场景为一架无人机在城市环境中飞行。无人机配备了INS、GNSS和里程计。
在仿真实验中,模拟了INS传感器故障和GNSS传感器故障。故障诊断方法能够有效地检测和隔离传感器故障。仿真结果表明,该方法能够将故障检测率提高到95%以上,并将故障隔离率提高到80%以上。
结论
本文提出了一种基于卡尔曼滤波残差的组合导航系统故障诊断方法。该方法利用卡尔曼滤波的残差序列来检测和隔离传感器故障。仿真结果表明,该方法能够有效地检测和隔离传感器故障,并提高组合导航系统的可靠性。
该故障诊断方法可以应用于各种组合导航系统,以提高系统的安全性和可靠性。未来,可以进一步研究基于机器学习和深度学习的故障诊断方法,以提高故障诊断的准确性和鲁棒性。
📣 部分代码
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% title: Fault Detection Based On Residual In Integrated Navigation System%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%clear all;clc;Re = 6378245;%地球长半径e = 1/298.257; %地球扁率wie = 7.292e-5; %地球自转角速度McNumber = 1000;InsData = textread('INS_Data.txt');%读入数据%真实航迹RealAcc = InsData(:,1:3);%真实加速度RealVel = InsData(:,4:6);%真实速度RealPos = InsData(:,7:9);%真实经纬高%惯导数据Ins_Acc = InsData(:,10:12);%惯导加速度Ins_Vel = InsData(:,13:15);%惯导速度Ins_Pos = InsData(:,16:18);%惯导位置Ins_Atd = InsData(:,19:22);%姿态四元数Ins_Sfc = InsData(:,23:25);%地理系下的比力
⛳️ 运行结果

🔗 参考文献
[1] 李晶.基于联邦卡尔曼滤波和机器学习的组合导航系统[D].昆明理工大学[2024-03-28].DOI:CNKI:CDMD:2.1012.430994.
[2] 曾庆双,蒋蔚,伊国兴.基于高性能DSP的小型组合导航系统设计与实现[J].哈尔滨商业大学学报:自然科学版, 2010(4):5.DOI:10.3969/j.issn.1672-0946.2010.04.023.
🎈 部分理论引用网络文献,若有侵权联系博主删除
🎁 关注我领取海量matlab电子书和数学建模资料
👇 私信完整代码和数据获取及论文数模仿真定制
1 各类智能优化算法改进及应用
生产调度、经济调度、装配线调度、充电优化、车间调度、发车优化、水库调度、三维装箱、物流选址、货位优化、公交排班优化、充电桩布局优化、车间布局优化、集装箱船配载优化、水泵组合优化、解医疗资源分配优化、设施布局优化、可视域基站和无人机选址优化、背包问题、 风电场布局、时隙分配优化、 最佳分布式发电单元分配、多阶段管道维修、 工厂-中心-需求点三级选址问题、 应急生活物质配送中心选址、 基站选址、 道路灯柱布置、 枢纽节点部署、 输电线路台风监测装置、 集装箱船配载优化、 机组优化、 投资优化组合、云服务器组合优化、 天线线性阵列分布优化、CVRP问题、VRPPD问题、多中心VRP问题、多层网络的VRP问题、多中心多车型的VRP问题、 动态VRP问题、双层车辆路径规划(2E-VRP)、充电车辆路径规划(EVRP)、油电混合车辆路径规划、混合流水车间问题、 订单拆分调度问题、 公交车的调度排班优化问题、航班摆渡车辆调度问题、选址路径规划问题
2 机器学习和深度学习方面
2.1 bp时序、回归预测和分类
2.2 ENS声神经网络时序、回归预测和分类
2.3 SVM/CNN-SVM/LSSVM/RVM支持向量机系列时序、回归预测和分类
2.4 CNN/TCN卷积神经网络系列时序、回归预测和分类
2.5 ELM/KELM/RELM/DELM极限学习机系列时序、回归预测和分类
2.6 GRU/Bi-GRU/CNN-GRU/CNN-BiGRU门控神经网络时序、回归预测和分类
2.7 ELMAN递归神经网络时序、回归\预测和分类
2.8 LSTM/BiLSTM/CNN-LSTM/CNN-BiLSTM/长短记忆神经网络系列时序、回归预测和分类
2.9 RBF径向基神经网络时序、回归预测和分类















 228
228











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









