






1、概述
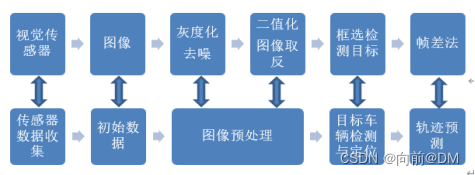
第一部分是在Prescan里面虚拟搭建本次研究所需的场景,然后在车上安装摄像头,根据摄像头对前方的目标车辆进行拍摄,并得到所需图像。
第二部分是将刚刚在Prescan里面,利用车载摄像头拍到的图像,将其用Matlab软件进行下一步的处理操作,这里面涉及到了许多图像处理的操作,包括了对于目标图像的二值化处理、图像取反、图像的灰度化处理,等多种图像处理操作。
第三部分是建立空间坐标系,通过得到的数据分析车辆的位置与状态,然后根据车辆状态来预测下个周期的状态与位置,从而达到对前方车辆的轨迹预测。
该内容主要是基于Prescan与Matlab联合使用的仿真测试环境下,验证了基于摄像头采集到的图像处理、目标车辆检测与定位和轨迹预测算法,经过实验验证结果表明:实现了基于视觉传感器对前方车辆轨迹预测的功能。达到精准控制和智能安全驾驶的目的,从而减少汽车自动驾驶中事故的发生。
本设计针对使用单目摄像头,充分考虑了该视觉传感器的特点,从对前方目标识别并获取其空间信息的需求出发,研究了基于视觉的自动驾驶前方车辆轨迹预测的方法,本课题设计的研究内容的总体方案设计如图所示
2、基于Prescan的场景模型搭建
Prescan软件,就是为了完成智能汽车驾驶的搭建与仿真的一个平台,该软件是由西门子公司创建的,该软件是通过以物理模型搭建为核心,通过开发汽车上面较为先进的辅助驾驶系统(例如ADAS)和一个搭建智能汽车系统模型的仿真平台。该软件支持多种传感器,包含了摄像头、雷达等各种传感器的应用以及后续的与第三方软件的联合开发与使用操作。Prescan软件,其使用原理十分的简单,首先是来搭建自己所需要的仿真平台, 通过Matlab软件,并且其主要适用于ADAS和无人自动驾驶系统的这些仿真模拟软件,由此可见,它是一种兼容性十分强大的一个仿真软件平台,该软件凭借着其灵活的界面,不仅可连接到另外一个的汽车动力学模型平台的软件,还能和第三方的硬件在环境模拟器/硬件。利用该软件进行虚拟交通场景设计与仿真,可以根据实验需要设置相应的道路状况和天气状况等,有效地减少了真实场景下实验的各种问题,降低了工作量,大大提升了研究的效率。
2.1Prescan的开发环境
Prescan软件的组成包含了多个模块,其仿真步骤主要分为以下四个:(1)搭建目标所需要的场景。Prescan是一个功能十分强大的图形编辑器,来供用户使用,使用者能够方便的使用道路分段,这其中包括了各种交通道路的标识牌、各种树木和各种建筑物(例如教堂、学校、新旧房子、工厂、大风车等)的一些比较基础的原件;包括了各种机动车(包含各种四轮车型,摩托车)、自行车和行人(包括不同年龄段的,不同性别的,不同身高的人)的交通道路的参加者:变换不同的天气条件(例如下雨天、雪天和大雾等各种不同的天气条件)以及各种仿真所需的光源(例如太阳光、汽车大灯和路边灯等光源)来搭建自己实验所需的各种各样的仿真场景。
(2)添加多种传感器。Prescan能够支持许多常用的传感器,包括各种雷达,例如超声波、毫米波以及激光雷达等、包括各种视觉传感器,例如单目和双目相机、鱼眼相机等。当然了,使用者也是可以根据自己需要搭建的模型来进行自由添加的。
(3)添加模型的控制系统。Prescan能够支持通过Matlab/Simulink等第三方软件来建立自己所需各种各样的控制模型,当然也可以来进行各种闭环控制,但是这需要通过和第三方的动力学仿真的模型来实现。
(4)运行与仿真。3D可视化查看支持用户来对分析试验的结果进行查看,同时也能够提供图片和动画生成等功能,也可以实现硬件在环仿真。利用Matlab和Prescan,建立智能网联汽车交叉口通行联合仿真模型,对交叉口交通进行仿真。Prescan中建立的自动驾驶环境可以通过软件内部接口与Matlab/S建立的控制算法进行联合仿真,实现对行驶车辆、交叉口信号灯等交通参与者的控制。
场景搭建常用的功能模型
| 软件功能模型 | 具体描述 |
| 交通场景模型 | Roads 道路模型 Actors 车辆模型 Weather & Lights 天气光照 …… |
| 传感器模型 | Camera 相机 Radar 毫米波雷达 Laser and lidar 激光雷达 AIR 真值传感器 …… |
(1)根据交通场景的需要选择使用Prescan提供的道路、车辆、天气光照等各种模型,搭建驾驶仿真环境。
(2)Prescan提供了多种传感器模型,可以根据需求将传感器安装在车上,并设置对应的参数。比如设置传感器在车上的安装位置, 激光雷达的线数、扫描的方式、扫描的频率、图像的采集频率等,传感器的设置。
(3)建立好场景模型后,利用Parse和Build命令生成场景模型;通过Prescan和Matlab/Simulink耦合使用,把路况的仿真结果导入Matlab,进行下一步处理,搭建好的场景模型。
(4)场景建模完整流程
首先打开软件新建场景,然后在道路模型中选择自己需要的路况,再对道路参数进行设置从而建立道路模型,然后建立车道线,然后放置实验车辆和障碍车辆,并在车辆上安装所需传感器,再根据需求来设置传感器参数,设置各个车辆的运行参数,最后设置天气状况和光照条件,然后点击Parse、Build新建场景模型,完成场景搭建。
Matlab是由两个单词组合而成的,实际上是“矩阵实验室”的意思。Matlab具有许多主要功能,包括对于数值的分析、数值和符号的计算、数字图像和信号的处理、工程和科学绘图、控制系统和通信系统的设计和仿真。目前,Matlab已经发展的十分迅速了,其已经成为了更多的学科、更多的工作平台的一个大型的适用工具。在国外,Matlab软件已经被考验了许多年。在欧美等高校,Matlab早已经成为高校开展高级
课程的一个十分基本的技能,包括线性代数、自动控制理论、数理统计等知识;同时也成为各个阶段学生必须掌握的一个基本技能。在设计方面的单位和工业部门,MATIAB也被广泛用于科学研究以及解决各种各样的具体问题。
(1)能够展现出可视化的计算结果,编程的可视化,人们本身通过自己计算是很复杂的,而由于该软件的可视化效果,就能很好的解决这一问题。即为Matlab软件界面。中间的编辑器窗口,下面的命令窗口以及右侧的工作区窗口分别表示了编辑的可视化,计算结果的可视化,我们只需要进行代码的编辑就能够完成我们需要实现的运算。
(2)数据的处理
针对本论文使用到的主要是图像的数据处理,我们可以清楚的看到软件对上面编写的程序进行了数据处理,依次来对我们论文所需的数据进行特征提取,从而完成论文研究的内容。Matlab的数据处理界面
(3)行相关的复杂运算
Matlab能够完成与行相关的各种复杂运算,这些是人工很难才能够实现的结果。各种运算方式都是可以通过在该软件中进行编程来实现的。
使用Simulink 和Matlab进行数据交互的时候,Simulink输出数据主要有两种方法。第一种方法是利用To Workspace模块直接将数据输出到Matlab的工作区间中,可以直接编写Matlab程序使用数据,这种方法简单方便。第二种方法使用Simulink中的To File模块,将数据以.mat文件的形式保存后输出,可以永久保存数据。为了避免进行系统建模和动态仿真时存储太多数据,本设计采用To Workspace的输出方法。
通过Prescan和Matlab/Simulink的耦合使用,把路况的仿真结果导入到Matlab,得到一个文件名后缀为“.slx”的文件,这个文件即为仿真结果的Simulink文件;点击该文件后,进入到Simulink工具箱的操作界面,通过在Matlab/Simulink的模块库中找到相应的功能模块或者添加自定义的功能模块,建立控制模型,将模块按照对应的顺序连结在一起,将数据输出到Matlab的工作区进行下一步的处理。
















 2091
2091

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











