






一、前言
最近在做一款基于手势控制的抓取机械臂,目前完成了一小部分 即用mpu6050 蓝牙控制机械臂实现三自由度运动 ,后续会更新K210目标拾取(基于三位运动学逆解)
二、基本原理
2.1、上位机
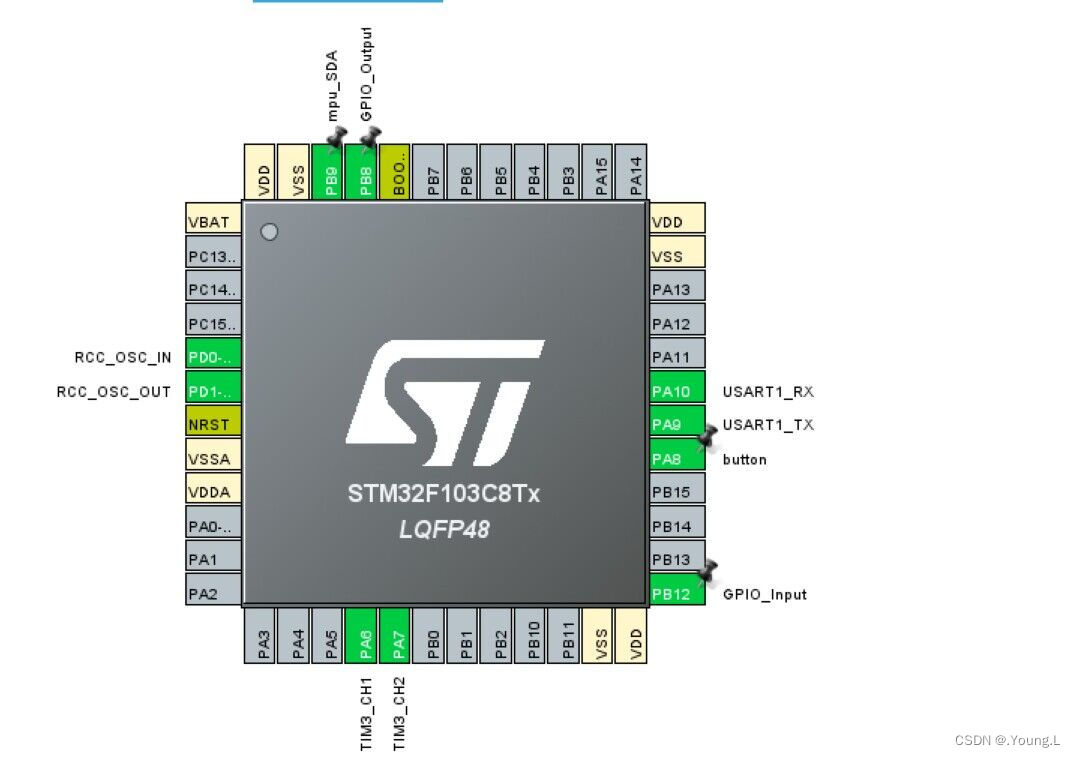
这里上位机时用的C8T6f103单片机和一块mpu六轴6050和一块蓝牙发送模块,首先在cubemx里面配置,开启串口1,PA8和PB12 作为两个红外传感器,一个用来控制其抓取目标,另一块用来控制其整体的开始和关闭(但是由于我事先没有考虑好硬件部分的分布,所以这两个功能在暂时没加上去,只有简单的手势控制) ,PB9设置pull-up输出连接MPU6050的DSA ,PB8连接mpu6050的SCL
如图:

2.2、代码部分
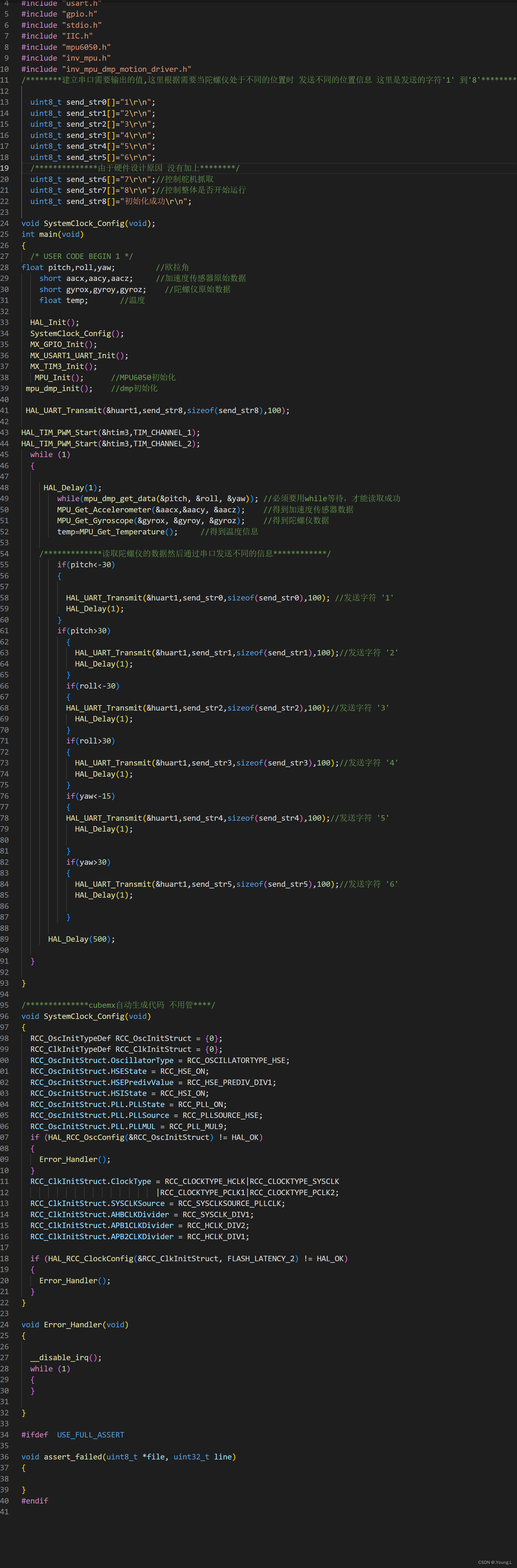
这里首先读取mpu6050的各个角的状态 ,如 然后根据读取到的值当yaw小于-30时,用串口传输字符'1',大于30时发送字符'2',roll小于-30时发送'4'大于30发送'5',pitch同理 发送'5'和 '6' ,这个就是代码的核心,省略的数据包传送的麻烦调试 ,直接在上位机上进行处理 ,,但这里需要提醒,串口发送的时候 不能使用重定向printf(),(电脑能显示,但是达不到控制效果)我也不知道为什么,只能用 Transmit函数 ,如图是代码
2.3、下位机部分
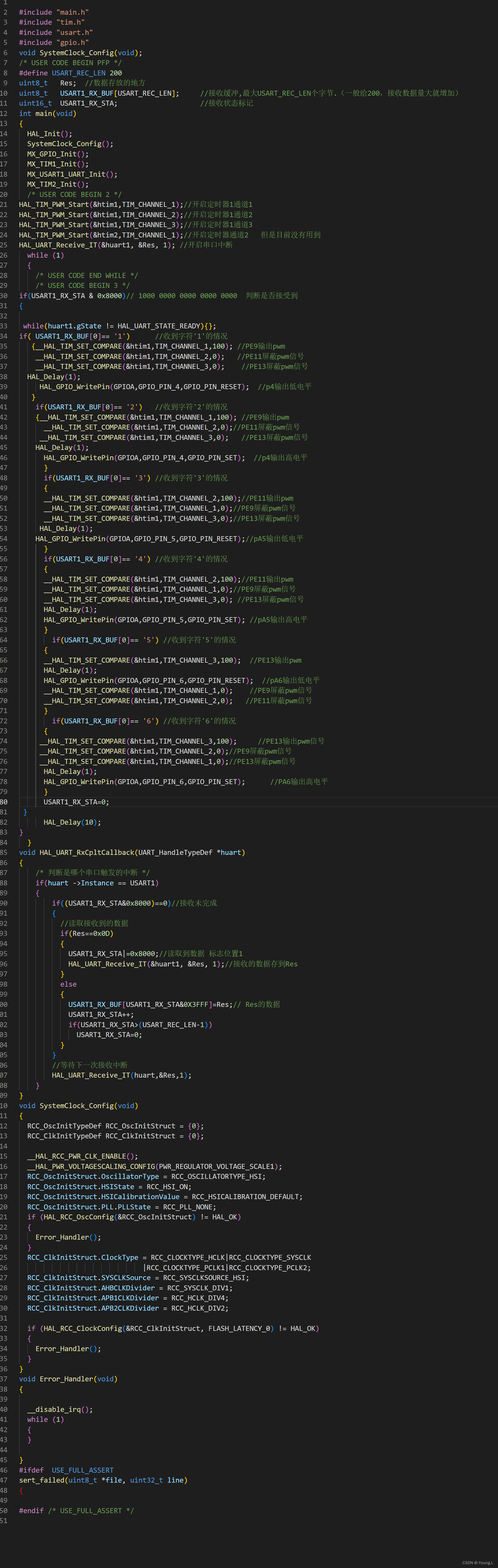
下位机用的是ZGT6f407,这里用cubemx配置串口,开启串口中断(用于接受上位机传输的数据) ,然后开启了定时器1的三个通道,用于输出pwm波 ,开启了PA4,PA5,PA6三个引脚来输出高低电平,如图

2.4、代码部分
这里的核心思路是,根据传输来的信息,来进行不同的反应,比如 当接受到串口的数据'1'时让定时器1的通道1(这里即PE9)输出pwm 通道2(PE11)和通道3(PE13)屏蔽pwm信号,同时PA4输出高电平 当接受的到'2'时就输出低电平,这样就做到了控制一个自由度的方向 其它两个自由度的方向同理 ,如图
三、视频演示部分
体感机械臂 基础部分

















 561
561

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









