






用于测试的计算机配置如下:
计算机为八核Intel(R) Xeon(R) CPU E3-1230 V2 @ 3.30GHz
注意:文中所说的cpu使用率是指该算法占用的cpu使用率
测试用的视频规格为1920*1080
做一路视频的去除畸变
cpu的使用率为126.9%
多路视频去除畸变显示
三路视频去除畸变显示代码如下:
import cv2
import numpy as np
from numpy.core.fromnumeric import reshape
import queue
import multiprocessing
import time
q = queue.Queue()
#savedir="camera_data/"
def ClearBackGround(img):
gray_img = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY) #灰度图
height, width = gray_img.shape #获取图片宽高
(_, blur_img) = cv2.threshold(gray_img, 100, 255, cv2.THRESH_BINARY) #二值化 固定阈值127
#去除黑色背景,seedPoint代表初始种子,进行四次,即对四个角都做一次,可去除最外围的黑边
blur_img = cv2.floodFill(blur_img,mask=None,seedPoint=(0,0),newVal=(255,255,255))[1]
blur_img = cv2.floodFill(blur_img, mask=None, seedPoint=(0,height-1), newVal=(255, 255, 255))[1]
blur_img = cv2.floodFill(blur_img, mask=None, seedPoint=(width-1, height-1), newVal=(255, 255, 255))[1]
blur_img = cv2.floodFill(blur_img, mask=None, seedPoint=(width-1, 0), newVal=(255, 255, 255))[1]
#blur_img = cv2.cvtColor(blur_img, cv2.COLOR_GRAY2RGB)
w1,h1=blur_img.shape[1],blur_img.shape[0]
w2,h2=img.shape[1],img.shape[0]
w=w2-w1
h=h2-h1
w_left=int(w/2)
h_b=int(h/3)
re_img=img[h_b:h1-5*h_b,w_left:w1+w_left]
cv2.imshow("clear_background", re_img)
return re_img
def remove_the_blackborder(image):
#image = cv2.imread(image) #读取图片
img = cv2.medianBlur(image, 5) #中值滤波,去除黑色边际中可能含有的噪声干扰
b = cv2.threshold(img, 185, 255, cv2.THRESH_BINARY) #调整裁剪效果
binary_image = b[1] #二值图--具有三通道
binary_image = cv2.cvtColor(binary_image,cv2.COLOR_BGR2GRAY)
# print(binary_image.shape) #改为单通道
edges_y, edges_x = np.where(binary_image==255) ##h, w
bottom = min(edges_y)
top = max(edges_y)
#height = top - bottom
left = min(edges_x)
right = max(edges_x)
height = top -bottom
width = right -left
res_image = image[bottom:bottom+height, left:left+width]
#plt.figure()
#plt.subplot(1,2,1)
#plt.imshow(image)
#plt.subplot(1,2,2)
#plt.imshow(res_image)
#plt.savefig(os.path.join("res_combine.jpg"))
#plt.show()
return res_image
def video_demo1(interval):
savedir="lzj_config/"
newcam_mtx = np.load(savedir+'lzj_video_newcameramtx.npy')
cam_mtx = np.load(savedir+'lzj_video_mtx.npy')
distCoeffs = np.load(savedir+'lzj_dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./camera_data/1.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo2(interval):
savedir="camera_data/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013634000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo3(interval):
savedir="camera_data/history_data/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013649000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
if __name__ == "__main__":
p1 = multiprocessing.Process(target = video_demo1, args = (2,))
p2 = multiprocessing.Process(target = video_demo2, args = (3,))
p3 = multiprocessing.Process(target = video_demo3, args = (4,))
p1.start()
p2.start()
p3.start()
print("The number of CPU is:" + str(multiprocessing.cpu_count()))
for p in multiprocessing.active_children():
print("child p.name:" + p.name + "\tp.id" + str(p.pid))
print("END!!!!!!!!!!!!!!!!!")
'''video_demo()
cap2 = cv2.VideoCapture("./camera_data/outpy3.avi.mp4")
ret2, frame2 = cap2.read()
frame2 = remove_the_blackborder(frame2)
fps, w, h = 30, frame2.shape[1], frame2.shape[0]
out2 = cv2.VideoWriter('./camera_data/outpy_qhb3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), fps, (w, h))
while True:
ret2, frame2 = cap2.read()
frame2 = remove_the_blackborder(frame2)
cv2.imshow('capture', frame2)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
out2.write(frame2)
cv2.destroyAllWindows()'''
没有卡顿
cpu的使用率为442.9%
增加到四路
代码如下:
import cv2
import numpy as np
from numpy.core.fromnumeric import reshape
import queue
import multiprocessing
import time
q = queue.Queue()
#savedir="camera_data/"
def ClearBackGround(img):
gray_img = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY) #灰度图
height, width = gray_img.shape #获取图片宽高
(_, blur_img) = cv2.threshold(gray_img, 100, 255, cv2.THRESH_BINARY) #二值化 固定阈值127
#去除黑色背景,seedPoint代表初始种子,进行四次,即对四个角都做一次,可去除最外围的黑边
blur_img = cv2.floodFill(blur_img,mask=None,seedPoint=(0,0),newVal=(255,255,255))[1]
blur_img = cv2.floodFill(blur_img, mask=None, seedPoint=(0,height-1), newVal=(255, 255, 255))[1]
blur_img = cv2.floodFill(blur_img, mask=None, seedPoint=(width-1, height-1), newVal=(255, 255, 255))[1]
blur_img = cv2.floodFill(blur_img, mask=None, seedPoint=(width-1, 0), newVal=(255, 255, 255))[1]
#blur_img = cv2.cvtColor(blur_img, cv2.COLOR_GRAY2RGB)
w1,h1=blur_img.shape[1],blur_img.shape[0]
w2,h2=img.shape[1],img.shape[0]
w=w2-w1
h=h2-h1
w_left=int(w/2)
h_b=int(h/3)
re_img=img[h_b:h1-5*h_b,w_left:w1+w_left]
cv2.imshow("clear_background", re_img)
return re_img
def remove_the_blackborder(image):
#image = cv2.imread(image) #读取图片
img = cv2.medianBlur(image, 5) #中值滤波,去除黑色边际中可能含有的噪声干扰
b = cv2.threshold(img, 185, 255, cv2.THRESH_BINARY) #调整裁剪效果
binary_image = b[1] #二值图--具有三通道
binary_image = cv2.cvtColor(binary_image,cv2.COLOR_BGR2GRAY)
# print(binary_image.shape) #改为单通道
edges_y, edges_x = np.where(binary_image==255) ##h, w
bottom = min(edges_y)
top = max(edges_y)
#height = top - bottom
left = min(edges_x)
right = max(edges_x)
height = top -bottom
width = right -left
res_image = image[bottom:bottom+height, left:left+width]
#plt.figure()
#plt.subplot(1,2,1)
#plt.imshow(image)
#plt.subplot(1,2,2)
#plt.imshow(res_image)
#plt.savefig(os.path.join("res_combine.jpg"))
#plt.show()
return res_image
def video_demo1(interval):
savedir="lzj_config/"
newcam_mtx = np.load(savedir+'lzj_video_newcameramtx.npy')
cam_mtx = np.load(savedir+'lzj_video_mtx.npy')
distCoeffs = np.load(savedir+'lzj_dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo2(interval):
savedir="camera_data/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013634000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo3(interval):
savedir="camera_data/history_data/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013649000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo4(interval):
savedir="camera_data/xididasha_data/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013697000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
if __name__ == "__main__":
p1 = multiprocessing.Process(target = video_demo1, args = (2,))
p2 = multiprocessing.Process(target = video_demo2, args = (3,))
p3 = multiprocessing.Process(target = video_demo3, args = (4,))
p4 = multiprocessing.Process(target = video_demo4, args = (5,))
p1.start()
p2.start()
p3.start()
p4.start()
print("The number of CPU is:" + str(multiprocessing.cpu_count()))
for p in multiprocessing.active_children():
print("child p.name:" + p.name + "\tp.id" + str(p.pid))
print("END!!!!!!!!!!!!!!!!!")
'''video_demo()
cap2 = cv2.VideoCapture("./camera_data/outpy3.avi.mp4")
ret2, frame2 = cap2.read()
frame2 = remove_the_blackborder(frame2)
fps, w, h = 30, frame2.shape[1], frame2.shape[0]
out2 = cv2.VideoWriter('./camera_data/outpy_qhb3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), fps, (w, h))
while True:
ret2, frame2 = cap2.read()
frame2 = remove_the_blackborder(frame2)
cv2.imshow('capture', frame2)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
out2.write(frame2)
cv2.destroyAllWindows()'''
运行结果:
视频有些许卡顿
cpu的使用率为594.7%
增加到6路视频
代码如下:
import cv2
import numpy as np
from numpy.core.fromnumeric import reshape
import queue
import multiprocessing
import time
q = queue.Queue()
#savedir="camera_data/"
def ClearBackGround(img):
gray_img = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY) #灰度图
height, width = gray_img.shape #获取图片宽高
(_, blur_img) = cv2.threshold(gray_img, 100, 255, cv2.THRESH_BINARY) #二值化 固定阈值127
#去除黑色背景,seedPoint代表初始种子,进行四次,即对四个角都做一次,可去除最外围的黑边
blur_img = cv2.floodFill(blur_img,mask=None,seedPoint=(0,0),newVal=(255,255,255))[1]
blur_img = cv2.floodFill(blur_img, mask=None, seedPoint=(0,height-1), newVal=(255, 255, 255))[1]
blur_img = cv2.floodFill(blur_img, mask=None, seedPoint=(width-1, height-1), newVal=(255, 255, 255))[1]
blur_img = cv2.floodFill(blur_img, mask=None, seedPoint=(width-1, 0), newVal=(255, 255, 255))[1]
#blur_img = cv2.cvtColor(blur_img, cv2.COLOR_GRAY2RGB)
w1,h1=blur_img.shape[1],blur_img.shape[0]
w2,h2=img.shape[1],img.shape[0]
w=w2-w1
h=h2-h1
w_left=int(w/2)
h_b=int(h/3)
re_img=img[h_b:h1-5*h_b,w_left:w1+w_left]
cv2.imshow("clear_background", re_img)
return re_img
def remove_the_blackborder(image):
#image = cv2.imread(image) #读取图片
img = cv2.medianBlur(image, 5) #中值滤波,去除黑色边际中可能含有的噪声干扰
b = cv2.threshold(img, 185, 255, cv2.THRESH_BINARY) #调整裁剪效果
binary_image = b[1] #二值图--具有三通道
binary_image = cv2.cvtColor(binary_image,cv2.COLOR_BGR2GRAY)
# print(binary_image.shape) #改为单通道
edges_y, edges_x = np.where(binary_image==255) ##h, w
bottom = min(edges_y)
top = max(edges_y)
#height = top - bottom
left = min(edges_x)
right = max(edges_x)
height = top -bottom
width = right -left
res_image = image[bottom:bottom+height, left:left+width]
#plt.figure()
#plt.subplot(1,2,1)
#plt.imshow(image)
#plt.subplot(1,2,2)
#plt.imshow(res_image)
#plt.savefig(os.path.join("res_combine.jpg"))
#plt.show()
return res_image
def video_demo1(interval):
savedir="lzj_config/"
newcam_mtx = np.load(savedir+'lzj_video_newcameramtx.npy')
cam_mtx = np.load(savedir+'lzj_video_mtx.npy')
distCoeffs = np.load(savedir+'lzj_dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo2(interval):
savedir="camera_data/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013634000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo3(interval):
savedir="camera_data/history_data/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013649000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo4(interval):
savedir="camera_data/xididasha_data/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013697000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo5(interval):
savedir="camera_data/960*540/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013728000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo6(interval):
savedir="camera_data/640*360/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013785000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
if __name__ == "__main__":
p1 = multiprocessing.Process(target = video_demo1, args = (2,))
p2 = multiprocessing.Process(target = video_demo2, args = (3,))
p3 = multiprocessing.Process(target = video_demo3, args = (4,))
p4 = multiprocessing.Process(target = video_demo4, args = (5,))
p5 = multiprocessing.Process(target = video_demo5, args = (6,))
p6 = multiprocessing.Process(target = video_demo6, args = (7,))
p1.start()
p2.start()
p3.start()
p4.start()
p5.start()
p6.start()
print("The number of CPU is:" + str(multiprocessing.cpu_count()))
for p in multiprocessing.active_children():
print("child p.name:" + p.name + "\tp.id" + str(p.pid))
print("END!!!!!!!!!!!!!!!!!")
'''video_demo()
cap2 = cv2.VideoCapture("./camera_data/outpy3.avi.mp4")
ret2, frame2 = cap2.read()
frame2 = remove_the_blackborder(frame2)
fps, w, h = 30, frame2.shape[1], frame2.shape[0]
out2 = cv2.VideoWriter('./camera_data/outpy_qhb3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), fps, (w, h))
while True:
ret2, frame2 = cap2.read()
frame2 = remove_the_blackborder(frame2)
cv2.imshow('capture', frame2)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
out2.write(frame2)
cv2.destroyAllWindows()'''
运行结果如下
视频延迟比较高
cpu使用率为563.2%
添加代码统计耗时
每帧图片处理耗时大概在450ms左右,显示起来非常卡顿,延时非常严重
发现视频是在去除畸变cv2.undistort这一步耗时较多
于是更换为remap进行尝试
代码如下:
import cv2
import numpy as np
from numpy.core.fromnumeric import reshape
import queue
import multiprocessing
import time
q = queue.Queue()
#savedir="camera_data/"
def ClearBackGround(img):
gray_img = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY) #灰度图
height, width = gray_img.shape #获取图片宽高
(_, blur_img) = cv2.threshold(gray_img, 100, 255, cv2.THRESH_BINARY) #二值化 固定阈值127
#去除黑色背景,seedPoint代表初始种子,进行四次,即对四个角都做一次,可去除最外围的黑边
blur_img = cv2.floodFill(blur_img,mask=None,seedPoint=(0,0),newVal=(255,255,255))[1]
blur_img = cv2.floodFill(blur_img, mask=None, seedPoint=(0,height-1), newVal=(255, 255, 255))[1]
blur_img = cv2.floodFill(blur_img, mask=None, seedPoint=(width-1, height-1), newVal=(255, 255, 255))[1]
blur_img = cv2.floodFill(blur_img, mask=None, seedPoint=(width-1, 0), newVal=(255, 255, 255))[1]
#blur_img = cv2.cvtColor(blur_img, cv2.COLOR_GRAY2RGB)
w1,h1=blur_img.shape[1],blur_img.shape[0]
w2,h2=img.shape[1],img.shape[0]
w=w2-w1
h=h2-h1
w_left=int(w/2)
h_b=int(h/3)
re_img=img[h_b:h1-5*h_b,w_left:w1+w_left]
cv2.imshow("clear_background", re_img)
return re_img
def remove_the_blackborder(image):
#image = cv2.imread(image) #读取图片
img = cv2.medianBlur(image, 5) #中值滤波,去除黑色边际中可能含有的噪声干扰
b = cv2.threshold(img, 185, 255, cv2.THRESH_BINARY) #调整裁剪效果
binary_image = b[1] #二值图--具有三通道
binary_image = cv2.cvtColor(binary_image,cv2.COLOR_BGR2GRAY)
# print(binary_image.shape) #改为单通道
edges_y, edges_x = np.where(binary_image==255) ##h, w
bottom = min(edges_y)
top = max(edges_y)
#height = top - bottom
left = min(edges_x)
right = max(edges_x)
height = top -bottom
width = right -left
res_image = image[bottom:bottom+height, left:left+width]
#plt.figure()
#plt.subplot(1,2,1)
#plt.imshow(image)
#plt.subplot(1,2,2)
#plt.imshow(res_image)
#plt.savefig(os.path.join("res_combine.jpg"))
#plt.show()
return res_image
def video_demo1(interval):
savedir="lzj_config/"
newcam_mtx = np.load(savedir+'lzj_video_newcameramtx.npy')
cam_mtx = np.load(savedir+'lzj_video_mtx.npy')
distCoeffs = np.load(savedir+'lzj_dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
#w,h = frame.shape[1],frame.shape[0]
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
q.put(undst)
undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo2(interval):
savedir="camera_data/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013634000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
#w,h = frame.shape[1],frame.shape[0]
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo3(interval):
savedir="camera_data/history_data/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013649000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo4(interval):
savedir="camera_data/xididasha_data/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013697000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo5(interval):
savedir="camera_data/960*540/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013728000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo6(interval):
savedir="camera_data/640*360/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013785000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
if __name__ == "__main__":
p1 = multiprocessing.Process(target = video_demo1, args = (2,))
p2 = multiprocessing.Process(target = video_demo2, args = (3,))
p3 = multiprocessing.Process(target = video_demo3, args = (4,))
p4 = multiprocessing.Process(target = video_demo4, args = (5,))
p5 = multiprocessing.Process(target = video_demo5, args = (6,))
p6 = multiprocessing.Process(target = video_demo6, args = (7,))
p1.start()
p2.start()
p3.start()
p4.start()
p5.start()
p6.start()
print("The number of CPU is:" + str(multiprocessing.cpu_count()))
for p in multiprocessing.active_children():
print("child p.name:" + p.name + "\tp.id" + str(p.pid))
print("END!!!!!!!!!!!!!!!!!")
'''video_demo()
cap2 = cv2.VideoCapture("./camera_data/outpy3.avi.mp4")
ret2, frame2 = cap2.read()
frame2 = remove_the_blackborder(frame2)
fps, w, h = 30, frame2.shape[1], frame2.shape[0]
out2 = cv2.VideoWriter('./camera_data/outpy_qhb3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), fps, (w, h))
while True:
ret2, frame2 = cap2.read()
frame2 = remove_the_blackborder(frame2)
cv2.imshow('capture', frame2)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
out2.write(frame2)
cv2.destroyAllWindows()'''
结果显示如下:
运行速度提高了很多,cpu的使用率为716.2%
添加代码统计每帧图片耗时
每帧图片运行耗时基本在140ms左右,对比之前耗时减少了很多
虽然耗时减少了,但延时很严重
对处理的摄像头图片进行缩放处理(缩小1.5倍)
运行结果如下:
算法对摄像头(video1)每帧图片处理耗时为80ms左右,cpu使用率为715.6%,对每帧图片处理延时依然严重
于是继续对代码进行修改,在缩图的基础上尝试使用多线程
代码如下:
import cv2
import numpy as np
from numpy.core.fromnumeric import reshape
import queue
import multiprocessing
import time
import threading
q = queue.Queue()
#savedir="camera_data/"
def ClearBackGround(img):
gray_img = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY) #灰度图
height, width = gray_img.shape #获取图片宽高
(_, blur_img) = cv2.threshold(gray_img, 100, 255, cv2.THRESH_BINARY) #二值化 固定阈值127
#去除黑色背景,seedPoint代表初始种子,进行四次,即对四个角都做一次,可去除最外围的黑边
blur_img = cv2.floodFill(blur_img,mask=None,seedPoint=(0,0),newVal=(255,255,255))[1]
blur_img = cv2.floodFill(blur_img, mask=None, seedPoint=(0,height-1), newVal=(255, 255, 255))[1]
blur_img = cv2.floodFill(blur_img, mask=None, seedPoint=(width-1, height-1), newVal=(255, 255, 255))[1]
blur_img = cv2.floodFill(blur_img, mask=None, seedPoint=(width-1, 0), newVal=(255, 255, 255))[1]
#blur_img = cv2.cvtColor(blur_img, cv2.COLOR_GRAY2RGB)
w1,h1=blur_img.shape[1],blur_img.shape[0]
w2,h2=img.shape[1],img.shape[0]
w=w2-w1
h=h2-h1
w_left=int(w/2)
h_b=int(h/3)
re_img=img[h_b:h1-5*h_b,w_left:w1+w_left]
cv2.imshow("clear_background", re_img)
return re_img
def remove_the_blackborder(image):
#image = cv2.imread(image) #读取图片
img = cv2.medianBlur(image, 5) #中值滤波,去除黑色边际中可能含有的噪声干扰
b = cv2.threshold(img, 185, 255, cv2.THRESH_BINARY) #调整裁剪效果
binary_image = b[1] #二值图--具有三通道
binary_image = cv2.cvtColor(binary_image,cv2.COLOR_BGR2GRAY)
# print(binary_image.shape) #改为单通道
edges_y, edges_x = np.where(binary_image==255) ##h, w
bottom = min(edges_y)
top = max(edges_y)
#height = top - bottom
left = min(edges_x)
right = max(edges_x)
height = top -bottom
width = right -left
res_image = image[bottom:bottom+height, left:left+width]
#plt.figure()
#plt.subplot(1,2,1)
#plt.imshow(image)
#plt.subplot(1,2,2)
#plt.imshow(res_image)
#plt.savefig(os.path.join("res_combine.jpg"))
#plt.show()
return res_image
def video_demo1(interval):
savedir="lzj_config/"
newcam_mtx = np.load(savedir+'lzj_video_newcameramtx.npy')
cam_mtx = np.load(savedir+'lzj_video_mtx.npy')
distCoeffs = np.load(savedir+'lzj_dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap.set(cv2.CAP_PROP_FPS, 8)
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
start_time = time.time()
cap.set(cv2.CAP_PROP_FPS, 7)
ret, frame = cap.read()
mid_time = time.time()
print('解码耗时:',mid_time-start_time)
if not ret:
continue
#w,h = frame.shape[1],frame.shape[0]
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
q.put(undst)
undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
end_time = time.time()
print('video1 FPS:',cap.get(5))
print('video1 耗时:',end_time-start_time)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo1_encode():
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap.set(cv2.CAP_PROP_FPS, 8)
ret, frame = cap.read()
#fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
q.put(frame)
print('video1 FPS:',cap.get(5))
while ret:
start_time = time.time()
ret, frame = cap.read()
q.put(frame)
end_time = time.time()
print('摄像头解码耗时:',end_time-start_time)
def video_demo1_undist():
savedir="lzj_config/"
newcam_mtx = np.load(savedir+'lzj_video_newcameramtx.npy')
cam_mtx = np.load(savedir+'lzj_video_mtx.npy')
distCoeffs = np.load(savedir+'lzj_dist.npy')
frame=q.get()
fps, w, h = 30, int(frame.shape[1]/1.5), int(frame.shape[0]/1.5)
while 1:
start_time = time.time()
if q.empty() !=True:
frame=q.get()
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
end_time = time.time()
#print('video1 FPS:',cap.get(5))
print('video1 耗时:',end_time-start_time)
if key & 0xff == ord('q'):
break
cap.release()
def video_demo1_run(interval):
d1=threading.Thread(target=video_demo1_encode)
d2=threading.Thread(target=video_demo1_undist)
d1.start()
d2.start()
def video_demo2(interval):
savedir="camera_data/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013634000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
start_time = time.time()
ret, frame = cap.read()
#w,h = frame.shape[1],frame.shape[0]
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
end_time = time.time()
#print('video2 FPS:',cap.get(5))
print('video2 耗时:',end_time-start_time)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo3(interval):
savedir="camera_data/history_data/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013649000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo4(interval):
savedir="camera_data/xididasha_data/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap=cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013697000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo5(interval):
savedir="camera_data/960*540/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013728000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo6(interval):
savedir="camera_data/640*360/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013785000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
if __name__ == "__main__":
p1 = multiprocessing.Process(target = video_demo1_run, args = (2,))
p2 = multiprocessing.Process(target = video_demo2, args = (3,))
p3 = multiprocessing.Process(target = video_demo3, args = (4,))
p4 = multiprocessing.Process(target = video_demo4, args = (5,))
p5 = multiprocessing.Process(target = video_demo5, args = (6,))
p6 = multiprocessing.Process(target = video_demo6, args = (7,))
p1.start()
p2.start()
p3.start()
p4.start()
p5.start()
p6.start()
print("The number of CPU is:" + str(multiprocessing.cpu_count()))
for p in multiprocessing.active_children():
print("child p.name:" + p.name + "\tp.id" + str(p.pid))
print("END!!!!!!!!!!!!!!!!!")
'''video_demo()
cap2 = cv2.VideoCapture("./camera_data/outpy3.avi.mp4")
ret2, frame2 = cap2.read()
frame2 = remove_the_blackborder(frame2)
fps, w, h = 30, frame2.shape[1], frame2.shape[0]
out2 = cv2.VideoWriter('./camera_data/outpy_qhb3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), fps, (w, h))
while True:
ret2, frame2 = cap2.read()
frame2 = remove_the_blackborder(frame2)
cv2.imshow('capture', frame2)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
out2.write(frame2)
cv2.destroyAllWindows()'''
运行结果如下:
对摄像头每帧的图片处理耗时在75ms左右,改善不明显,但延时得到了极大的改善,现在是实时显示
进行八路视频的畸变矫正显示
代码如下:
import cv2
import numpy as np
from numpy.core.fromnumeric import reshape
import queue
import multiprocessing
import time
import threading
q = queue.Queue()
#savedir="camera_data/"
def ClearBackGround(img):
gray_img = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY) #灰度图
height, width = gray_img.shape #获取图片宽高
(_, blur_img) = cv2.threshold(gray_img, 100, 255, cv2.THRESH_BINARY) #二值化 固定阈值127
#去除黑色背景,seedPoint代表初始种子,进行四次,即对四个角都做一次,可去除最外围的黑边
blur_img = cv2.floodFill(blur_img,mask=None,seedPoint=(0,0),newVal=(255,255,255))[1]
blur_img = cv2.floodFill(blur_img, mask=None, seedPoint=(0,height-1), newVal=(255, 255, 255))[1]
blur_img = cv2.floodFill(blur_img, mask=None, seedPoint=(width-1, height-1), newVal=(255, 255, 255))[1]
blur_img = cv2.floodFill(blur_img, mask=None, seedPoint=(width-1, 0), newVal=(255, 255, 255))[1]
#blur_img = cv2.cvtColor(blur_img, cv2.COLOR_GRAY2RGB)
w1,h1=blur_img.shape[1],blur_img.shape[0]
w2,h2=img.shape[1],img.shape[0]
w=w2-w1
h=h2-h1
w_left=int(w/2)
h_b=int(h/3)
re_img=img[h_b:h1-5*h_b,w_left:w1+w_left]
cv2.imshow("clear_background", re_img)
return re_img
def remove_the_blackborder(image):
#image = cv2.imread(image) #读取图片
img = cv2.medianBlur(image, 5) #中值滤波,去除黑色边际中可能含有的噪声干扰
b = cv2.threshold(img, 185, 255, cv2.THRESH_BINARY) #调整裁剪效果
binary_image = b[1] #二值图--具有三通道
binary_image = cv2.cvtColor(binary_image,cv2.COLOR_BGR2GRAY)
# print(binary_image.shape) #改为单通道
edges_y, edges_x = np.where(binary_image==255) ##h, w
bottom = min(edges_y)
top = max(edges_y)
#height = top - bottom
left = min(edges_x)
right = max(edges_x)
height = top -bottom
width = right -left
res_image = image[bottom:bottom+height, left:left+width]
#plt.figure()
#plt.subplot(1,2,1)
#plt.imshow(image)
#plt.subplot(1,2,2)
#plt.imshow(res_image)
#plt.savefig(os.path.join("res_combine.jpg"))
#plt.show()
return res_image
def video_demo1(interval):
savedir="lzj_config/"
newcam_mtx = np.load(savedir+'lzj_video_newcameramtx.npy')
cam_mtx = np.load(savedir+'lzj_video_mtx.npy')
distCoeffs = np.load(savedir+'lzj_dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap.set(cv2.CAP_PROP_FPS, 8)
ret, frame = cap.read()
fps, w, h = 30, int(frame.shape[1]/1.5), int(frame.shape[0]/1.5)
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
start_time = time.time()
cap.set(cv2.CAP_PROP_FPS, 7)
ret, frame = cap.read()
mid_time = time.time()
print('摄像头解码耗时:',mid_time-start_time)
if not ret:
continue
#w,h = frame.shape[1],frame.shape[0]
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
q.put(undst)
undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
end_time = time.time()
print('video1 FPS:',cap.get(5))
print('video1 处理耗时:',end_time-start_time)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo1_encode():
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap.set(cv2.CAP_PROP_FPS, 8)
ret, frame = cap.read()
#fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
q.put(frame)
print('video1 FPS:',cap.get(5))
while ret:
start_time = time.time()
ret, frame = cap.read()
q.put(frame)
end_time = time.time()
print('摄像头解码耗时:',end_time-start_time)
def video_demo1_undist():
savedir="lzj_config/"
newcam_mtx = np.load(savedir+'lzj_video_newcameramtx.npy')
cam_mtx = np.load(savedir+'lzj_video_mtx.npy')
distCoeffs = np.load(savedir+'lzj_dist.npy')
frame=q.get()
fps, w, h = 30, int(frame.shape[1]/1.5), int(frame.shape[0]/1.5)
while 1:
start_time = time.time()
if q.empty() !=True:
frame=q.get()
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
end_time = time.time()
#print('video1 FPS:',cap.get(5))
print('video1 耗时:',end_time-start_time)
if key & 0xff == ord('q'):
break
cap.release()
def video_demo1_run(interval):
d1=threading.Thread(target=video_demo1_encode)
d2=threading.Thread(target=video_demo1_undist)
d1.start()
d2.start()
def video_demo2(interval):
savedir="camera_data/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013634000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
start_time = time.time()
ret, frame = cap.read()
#w,h = frame.shape[1],frame.shape[0]
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
end_time = time.time()
#print('video2 FPS:',cap.get(5))
print('video2 耗时:',end_time-start_time)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo3(interval):
savedir="camera_data/history_data/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013649000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo4(interval):
savedir="camera_data/xididasha_data/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013697000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo5(interval):
savedir="camera_data/960*540/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013728000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo6(interval):
savedir="camera_data/640*360/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013785000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo7(interval):
savedir="camera_data/xididasha_data2/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013842000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo8(interval):
savedir="camera_data/xididasha_data3/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013838000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
while 1:
ret, frame = cap.read()
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
if __name__ == "__main__":
#p1 = multiprocessing.Process(target = video_demo1, args = (2,))
p1 = multiprocessing.Process(target = video_demo1_run, args = (2,))
p2 = multiprocessing.Process(target = video_demo2, args = (3,))
p3 = multiprocessing.Process(target = video_demo3, args = (4,))
p4 = multiprocessing.Process(target = video_demo4, args = (5,))
p5 = multiprocessing.Process(target = video_demo5, args = (6,))
p6 = multiprocessing.Process(target = video_demo6, args = (7,))
p7 = multiprocessing.Process(target = video_demo7, args = (8,))
p8 = multiprocessing.Process(target = video_demo8, args = (9,))
p1.start()
p2.start()
p3.start()
p4.start()
p5.start()
p6.start()
p7.start()
p8.start()
print("The number of CPU is:" + str(multiprocessing.cpu_count()))
for p in multiprocessing.active_children():
print("child p.name:" + p.name + "\tp.id" + str(p.pid))
print("END!!!!!!!!!!!!!!!!!")
'''video_demo()
cap2 = cv2.VideoCapture("./camera_data/outpy3.avi.mp4")
ret2, frame2 = cap2.read()
frame2 = remove_the_blackborder(frame2)
fps, w, h = 30, frame2.shape[1], frame2.shape[0]
out2 = cv2.VideoWriter('./camera_data/outpy_qhb3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), fps, (w, h))
while True:
ret2, frame2 = cap2.read()
frame2 = remove_the_blackborder(frame2)
cv2.imshow('capture', frame2)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
out2.write(frame2)
cv2.destroyAllWindows()'''
结果显示如下:
算法对摄像头(video1)每帧图片处理耗时在100ms左右,延时较为严重,同时电脑也存在卡顿现象
继续检查代码,发现
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
这段代码可以放到循环外面提高运行效率
修改后的代码如下:
import cv2
import numpy as np
from numpy.core.fromnumeric import reshape
import queue
import multiprocessing
import time
import threading
q = queue.Queue()
#savedir="camera_data/"
def ClearBackGround(img):
gray_img = cv2.cvtColor(img, cv2.COLOR_RGB2GRAY) #灰度图
height, width = gray_img.shape #获取图片宽高
(_, blur_img) = cv2.threshold(gray_img, 100, 255, cv2.THRESH_BINARY) #二值化 固定阈值127
#去除黑色背景,seedPoint代表初始种子,进行四次,即对四个角都做一次,可去除最外围的黑边
blur_img = cv2.floodFill(blur_img,mask=None,seedPoint=(0,0),newVal=(255,255,255))[1]
blur_img = cv2.floodFill(blur_img, mask=None, seedPoint=(0,height-1), newVal=(255, 255, 255))[1]
blur_img = cv2.floodFill(blur_img, mask=None, seedPoint=(width-1, height-1), newVal=(255, 255, 255))[1]
blur_img = cv2.floodFill(blur_img, mask=None, seedPoint=(width-1, 0), newVal=(255, 255, 255))[1]
#blur_img = cv2.cvtColor(blur_img, cv2.COLOR_GRAY2RGB)
w1,h1=blur_img.shape[1],blur_img.shape[0]
w2,h2=img.shape[1],img.shape[0]
w=w2-w1
h=h2-h1
w_left=int(w/2)
h_b=int(h/3)
re_img=img[h_b:h1-5*h_b,w_left:w1+w_left]
cv2.imshow("clear_background", re_img)
return re_img
def remove_the_blackborder(image):
#image = cv2.imread(image) #读取图片
img = cv2.medianBlur(image, 5) #中值滤波,去除黑色边际中可能含有的噪声干扰
b = cv2.threshold(img, 185, 255, cv2.THRESH_BINARY) #调整裁剪效果
binary_image = b[1] #二值图--具有三通道
binary_image = cv2.cvtColor(binary_image,cv2.COLOR_BGR2GRAY)
# print(binary_image.shape) #改为单通道
edges_y, edges_x = np.where(binary_image==255) ##h, w
bottom = min(edges_y)
top = max(edges_y)
#height = top - bottom
left = min(edges_x)
right = max(edges_x)
height = top -bottom
width = right -left
res_image = image[bottom:bottom+height, left:left+width]
#plt.figure()
#plt.subplot(1,2,1)
#plt.imshow(image)
#plt.subplot(1,2,2)
#plt.imshow(res_image)
#plt.savefig(os.path.join("res_combine.jpg"))
#plt.show()
return res_image
def video_demo1(interval):
savedir="lzj_config/"
newcam_mtx = np.load(savedir+'lzj_video_newcameramtx.npy')
cam_mtx = np.load(savedir+'lzj_video_mtx.npy')
distCoeffs = np.load(savedir+'lzj_dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap.set(cv2.CAP_PROP_FPS, 8)
ret, frame = cap.read()
fps, w, h = 30, int(frame.shape[1]/1.5), int(frame.shape[0]/1.5)
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
while 1:
start_time = time.time()
cap.set(cv2.CAP_PROP_FPS, 7)
ret, frame = cap.read()
mid_time = time.time()
print('摄像头解码耗时:',mid_time-start_time)
if not ret:
continue
#w,h = frame.shape[1],frame.shape[0]
#mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
q.put(undst)
undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
end_time = time.time()
print('video1 FPS:',cap.get(5))
print('video1 处理耗时:',end_time-start_time)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo1_encode():
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap.set(cv2.CAP_PROP_FPS, 8)
ret, frame = cap.read()
#fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
q.put(frame)
print('video1 FPS:',cap.get(5))
while ret:
start_time = time.time()
ret, frame = cap.read()
q.put(frame)
end_time = time.time()
print('摄像头解码耗时:',end_time-start_time)
def video_demo1_undist():
savedir="lzj_config/"
newcam_mtx = np.load(savedir+'lzj_video_newcameramtx.npy')
cam_mtx = np.load(savedir+'lzj_video_mtx.npy')
distCoeffs = np.load(savedir+'lzj_dist.npy')
frame=q.get()
fps, w, h = 30, int(frame.shape[1]/1.5), int(frame.shape[0]/1.5)
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
while 1:
start_time = time.time()
if q.empty() !=True:
frame=q.get()
print('video W:',w)
print(' video H:',h)
#mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
end_time = time.time()
#print('video1 FPS:',cap.get(5))
print('video1 耗时:',end_time-start_time)
if key & 0xff == ord('q'):
break
cap.release()
def video_demo1_run(interval):
d1=threading.Thread(target=video_demo1_encode)
d2=threading.Thread(target=video_demo1_undist)
d1.start()
d2.start()
def video_demo2(interval):
savedir="camera_data/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013634000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
while 1:
start_time = time.time()
ret, frame = cap.read()
#w,h = frame.shape[1],frame.shape[0]
print('video2 W:',w)
print(' video2 H:',h)
#mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
end_time = time.time()
#print('video2 FPS:',cap.get(5))
print('video2 耗时:',end_time-start_time)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo3(interval):
savedir="camera_data/history_data/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013649000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
while 1:
ret, frame = cap.read()
#mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo4(interval):
savedir="camera_data/xididasha_data/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013697000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
while 1:
ret, frame = cap.read()
#mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo5(interval):
savedir="camera_data/960*540/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013728000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
while 1:
ret, frame = cap.read()
#mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo6(interval):
savedir="camera_data/640*360/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013785000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
while 1:
ret, frame = cap.read()
#mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo7(interval):
savedir="camera_data/xididasha_data2/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013842000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
while 1:
ret, frame = cap.read()
#mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
def video_demo8(interval):
savedir="camera_data/xididasha_data3/"
newcam_mtx = np.load(savedir+'newcam_mtx.npy')
cam_mtx = np.load(savedir+'cam_mtx.npy')
distCoeffs = np.load(savedir+'dist.npy')
#cap = cv2.VideoCapture("rtsp://admin:admin123@192.168.1.39:554/stream1&channel=1")
cap = cv2.VideoCapture("./video/2021-12-30/00000013838000000.mp4")
ret, frame = cap.read()
fps, w, h = 30, frame.shape[1], frame.shape[0]
# ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=5000 speed-preset=superfast ! rtph264pay ! udpsink host=127.0.0.1 port=5000', cv2.CAP_GSTREAMER, fps, (w, h))
#ab = cv2.VideoWriter('appsrc ! videoconvert ! x264enc tune=zerolatency bitrate=10000 speed-preset=superfast ! h264parse ! flvmux ! rtmpsink location=rtmp://127.0.0.1:1935/rec/live', cv2.CAP_GSTREAMER, fps, (w, h))
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 20, (w, h))
mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
while 1:
ret, frame = cap.read()
#mapx,mapy = cv2.initUndistortRectifyMap(cam_mtx,distCoeffs,None,newcam_mtx,(w,h),5)
undst = cv2.remap(frame,mapx,mapy,cv2.INTER_LINEAR)
#undst = cv2.undistort(frame, cam_mtx, distCoeffs, None, newcam_mtx)
#undst=ClearBackGround(undst)
#undst = remove_the_blackborder(undst)
#w,h = undst.shape[1],undst.shape[0]
#out = cv2.VideoWriter('./camera_data/outpy3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), 10, (w, h))
#q.put(undst)
#undst = q.get()
cv2.imshow('capture', undst)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
#out.write(undst)
#ab.write(undst)
cap.release()
if __name__ == "__main__":
#p1 = multiprocessing.Process(target = video_demo1, args = (2,))
p1 = multiprocessing.Process(target = video_demo1_run, args = (2,))
p2 = multiprocessing.Process(target = video_demo2, args = (3,))
p3 = multiprocessing.Process(target = video_demo3, args = (4,))
p4 = multiprocessing.Process(target = video_demo4, args = (5,))
p5 = multiprocessing.Process(target = video_demo5, args = (6,))
p6 = multiprocessing.Process(target = video_demo6, args = (7,))
#p7 = multiprocessing.Process(target = video_demo7, args = (8,))
#p8 = multiprocessing.Process(target = video_demo8, args = (9,))
p1.start()
p2.start()
p3.start()
p4.start()
p5.start()
p6.start()
#p7.start()
#p8.start()
print("The number of CPU is:" + str(multiprocessing.cpu_count()))
for p in multiprocessing.active_children():
print("child p.name:" + p.name + "\tp.id" + str(p.pid))
print("END!!!!!!!!!!!!!!!!!")
'''video_demo()
cap2 = cv2.VideoCapture("./camera_data/outpy3.avi.mp4")
ret2, frame2 = cap2.read()
frame2 = remove_the_blackborder(frame2)
fps, w, h = 30, frame2.shape[1], frame2.shape[0]
out2 = cv2.VideoWriter('./camera_data/outpy_qhb3.avi', cv2.VideoWriter_fourcc('M', 'J', 'P', 'G'), fps, (w, h))
while True:
ret2, frame2 = cap2.read()
frame2 = remove_the_blackborder(frame2)
cv2.imshow('capture', frame2)
key= cv2.waitKey(1)
if key & 0xff == ord('q'):
break
out2.write(frame2)
cv2.destroyAllWindows()'''
6路视频运行结果如下:
算法对摄像头每帧图片处理时间为45ms左右,改进后速度提高很多,cpu使用率为
改成八路视频
运行结果如下图
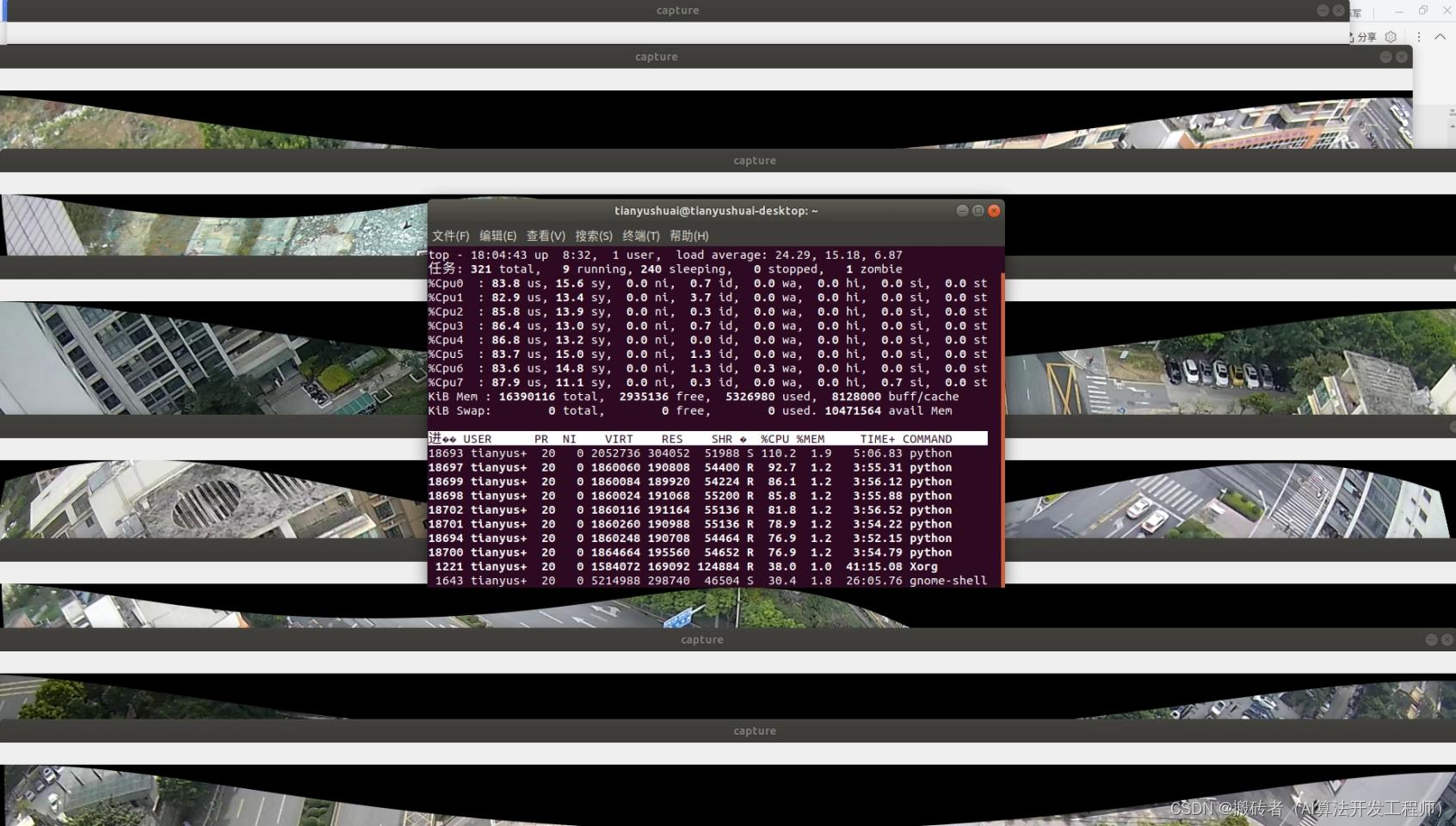
算法对摄像头每帧图片的处理时间为65ms左右,实时性也非常好,cpu的使用率为
| cpu(八核) | memery(16G) | speed(平均) | 摄像头延时 | |
| 1路 | 126.9% | 1.9% | 正常 | |
| 3路 | 442.9% | 3.1% | 正常 | |
| 4路 | 594.7% | 3.3% | 严重 | |
| 6路(undistort) | 675.5% | 7.4% | 450ms | 严重 |
| 6路(remap) | 716.2% | 8.3% | 140ms | 严重 |
| 6路(remap+缩图) | 715.6% | 8.3% | 80ms | 严重 |
| 6路(remap++缩图+多线程) | 701.9% | 9.7% | 75ms | 正常 |
| 6路(remap++缩图+多线程+代码改进) | 706.7% | 7.8% | 45ms | 正常 |
| 8路(remap++缩图+多线程) | 727.1% | 16.1% | 100ms | 较为严重,电脑卡顿严重(存在死机风险) |
| 8路(remap++缩图+多线程+代码改进) | 775.3% | 11.4% | 65ms | 正常 |

















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











