






一、准备工作
有关OLED屏初始化的问题,详见【STM32+HAL】OLED显示初始化配置
二、所用工具
1、芯片:STM32F10C8T6
2、CUBEMX配置软件
3、 6 轴运动处理组件MPU6050
三、实现功能
OLED屏显示姿态角
四、HAL配置步骤
1、开启I2C1进行MPU6050通信

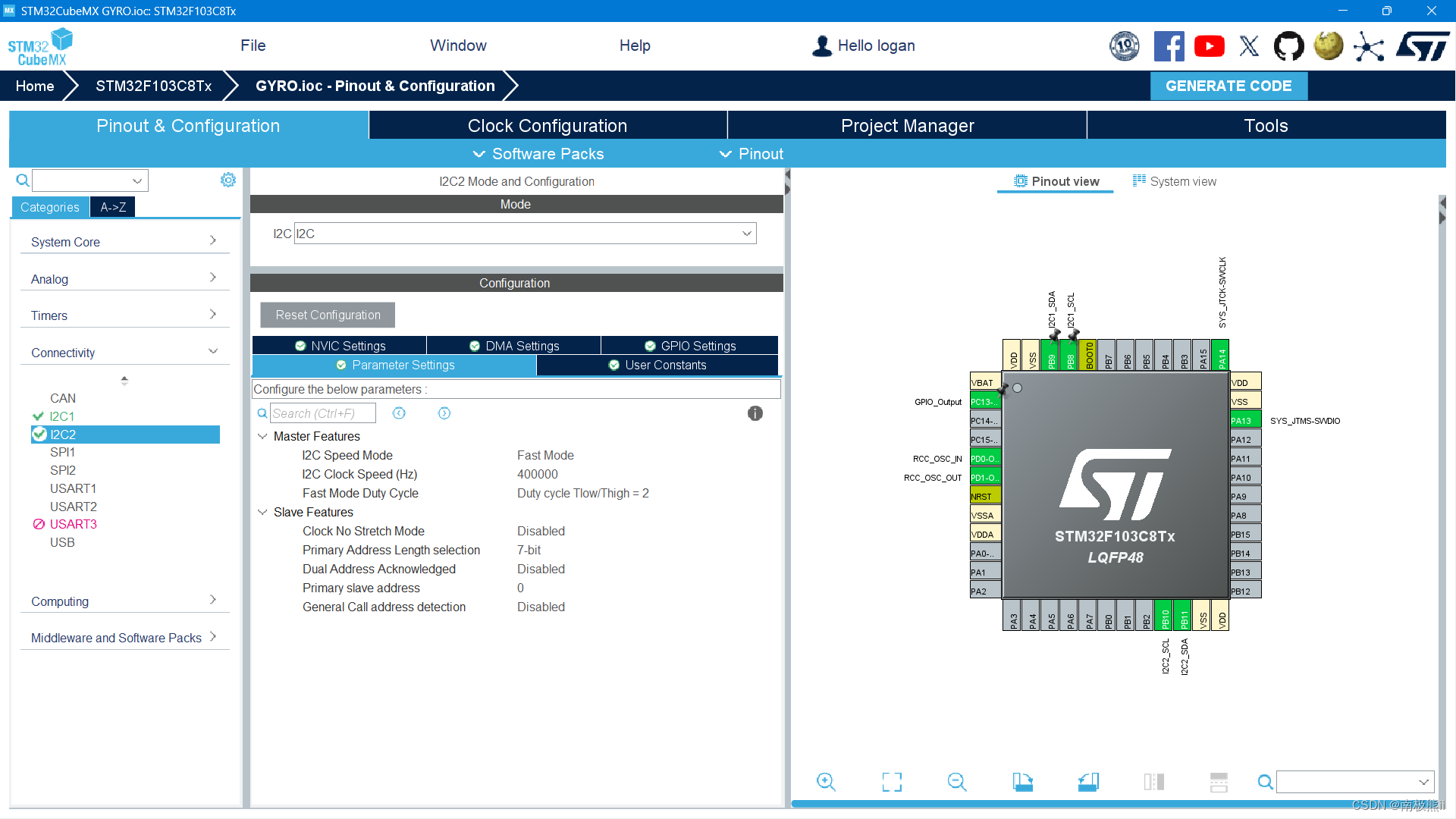
2、开启I2C2进行OLED屏配置
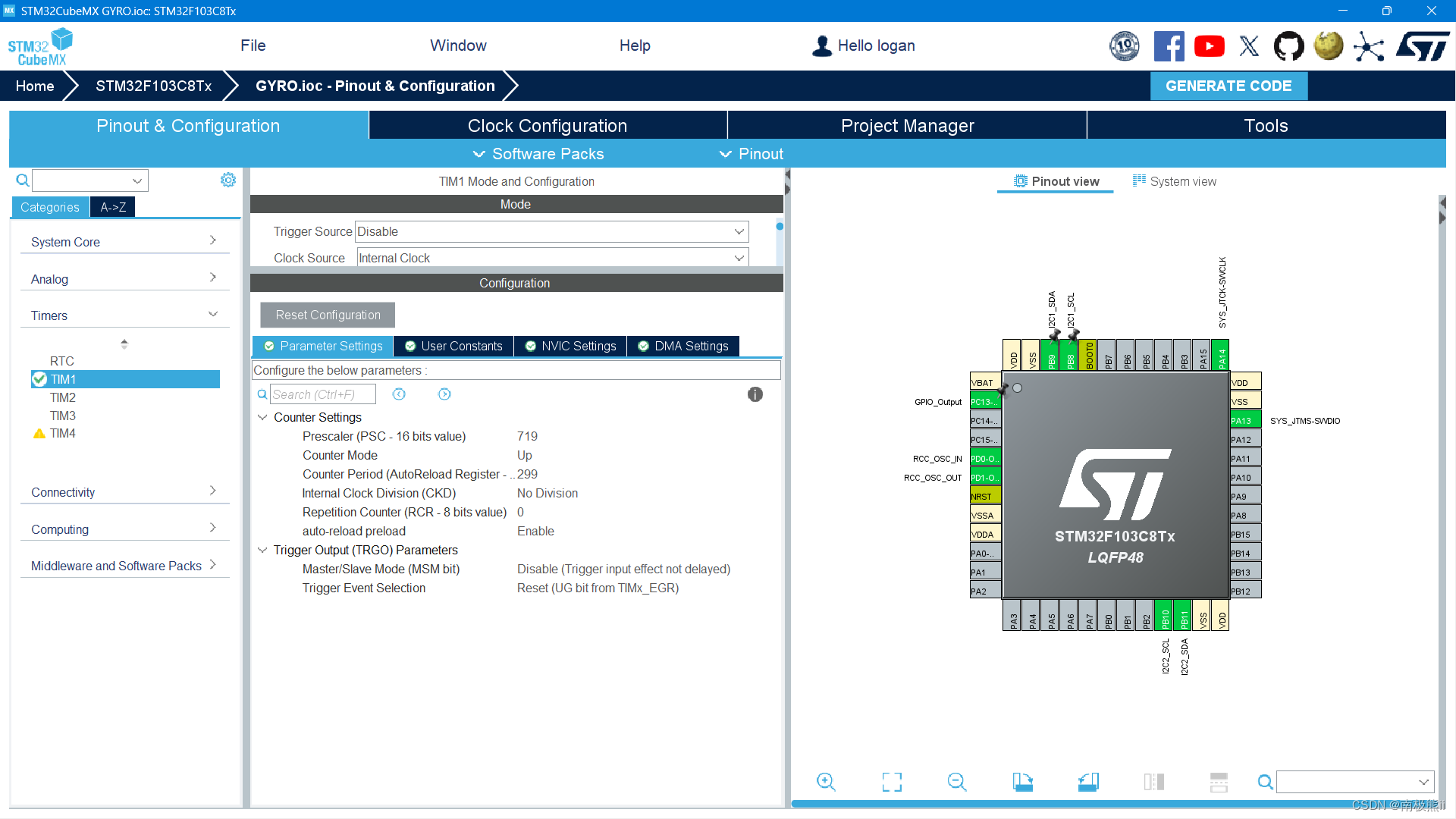
3、开启定时器1
至此,CUBEMX配置完成
五、巨人之肩
实际原理与代码讲解见:
基于STM32的四旋翼无人机项目(二):MPU6050姿态解算(含上位机3D姿态显示教学)















 1997
1997











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









