






以野火stm32f407开发板为例。
mpu6050简介
MPU6050 芯片,它是一种六轴传感器模块,采用 InvenSense 公司的 MPU6050 作为主芯片,能同时检测三轴加速度、三轴陀螺仪 (三轴角速度) 的运动数据以及温度数据。利用 MPU6050 芯片内部的 DMP 模块(Digital Motion Processor 数字运动处理器),可对传感器数据进行滤波、融合处理,它直接通过 I2C 接口向主控器输出姿态解算后的姿态数据,降低主控器的运算量。其姿态解算频率最高可达 200Hz,非常适合用于对姿态控制实时要求较高的领域。常见应用于手机、智能手环、四轴飞行器及计步器等的姿态检测。
一、硬件设计电路

根据电路图原理图,确定I2C引脚PB8和PB9。
它的硬件连接非常简单,SDA 与 SCL 引出到 STM32 的 I2C 引脚,注意图中的 I2C 没有画出上拉电阻,只是因为实验板中其它芯片也使用了同样的 I2C 总线,电阻画到了其它芯片的图里,没有出现在这个图中而已。传感器的 I2C 设备地址可通过 AD0 引脚的电平控制,当 AD0 接地时,设备地址为 0x68(七位地址),当 AD0 接电源时,设备地址为 0x69(七位地址)。另外,传感器的 INT引脚接到了 STM32 的普通 IO 口,当传感器有新数据的时候会通过 INT 引脚通知 STM32。由于 MPU6050 检测时是基于自己中心坐标系的,所以在自己设计硬件时,您需要考虑它与所在设备的坐标系统的关系。
程序设计要点:
①初始化 STM32 的 I2C;
②使用 I2C 向 MPU6050 写入控制参数;
③定时读取加速度、角速度。
二、快速开发
基于rt-thread系统可以快速开发,rt-thread软件包中有mpu6xxx软件包。
操作步骤如下:
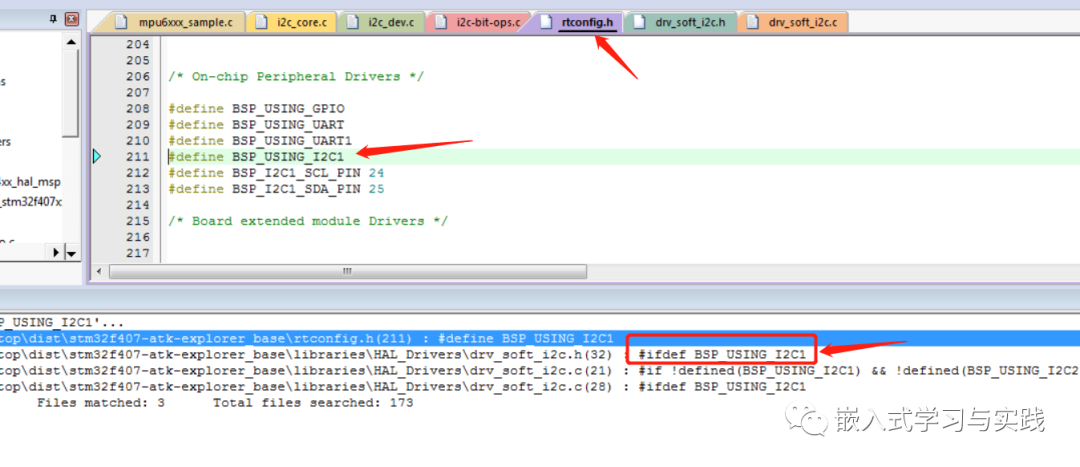
①使能I2C,填写正确的引脚号。计算方式在上一章文章<手把手教-单片机和w5500模块基于rt-thread中wiznet软件包的使用>中有介绍。

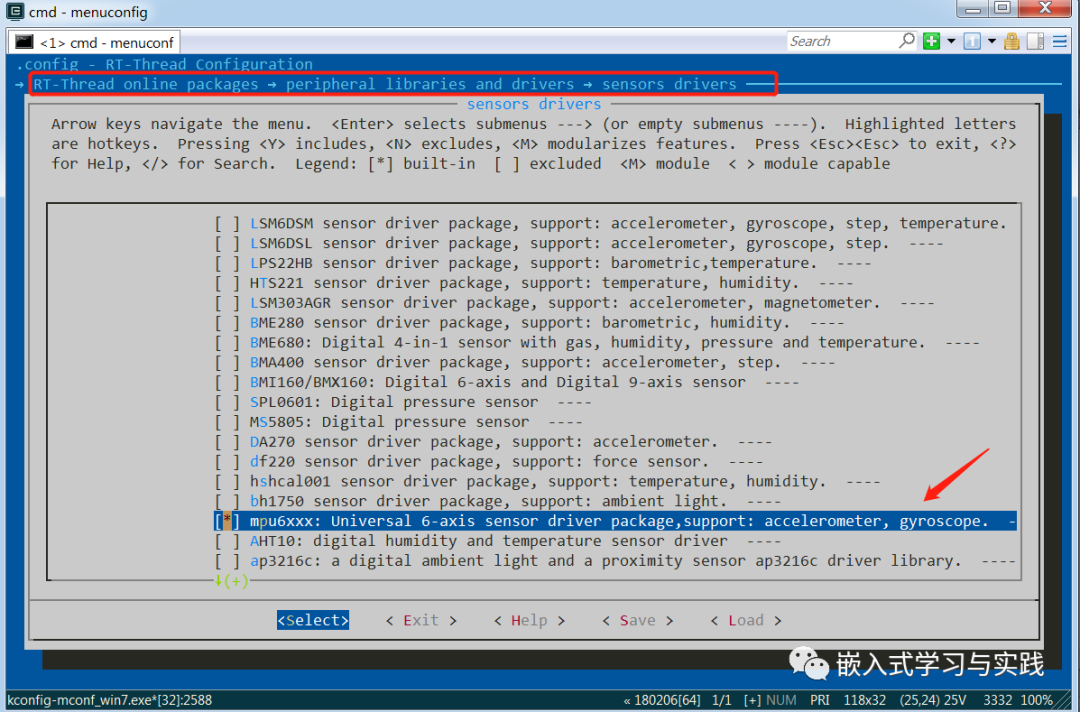
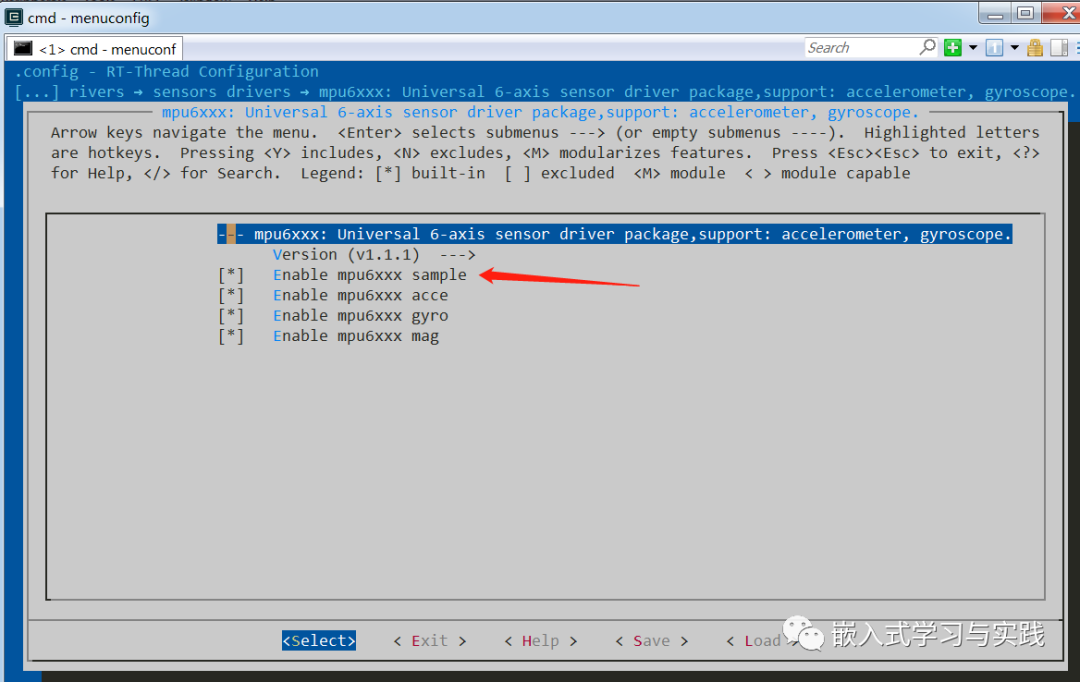
②添加mpu6xxx软件包
③下载软件包,更新工程
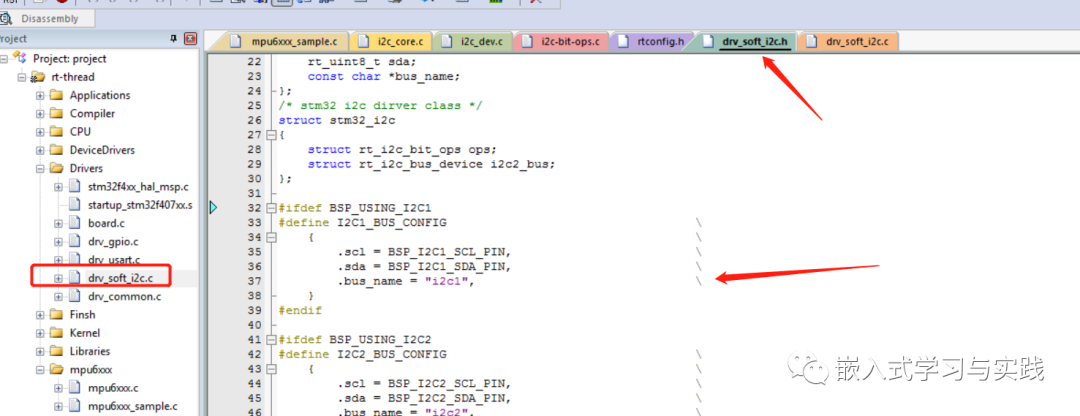
修改代码,改为正确的I2C名称
#define MPU6XXX_DEVICE_NAME "i2c1"
如何确定名称呢?
或者

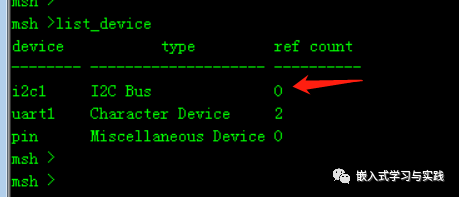
也可以编译直接下载到开发板,使用list_device查看注册的名称
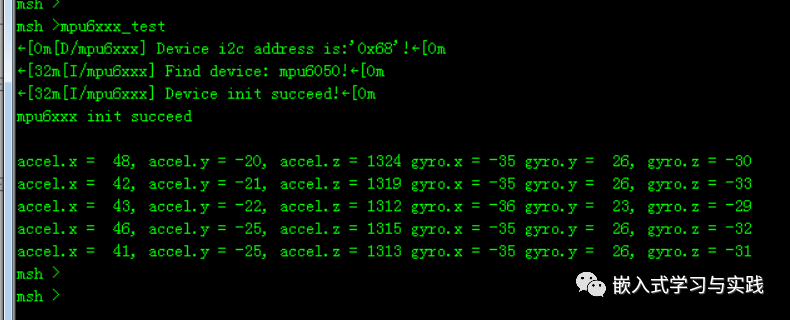
④测试mpu6050功能
使用mpu6xxx_test指令,测试,可以获取到mpu6050的数据结果。
欢迎关注个人公众号:嵌入式学习与实践
参考:
STM32 HAL 库开发实战指南---基于野火 F4 系列开发板















 1008
1008











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









