







 本文介绍了一种结合UWB与IMU的紧组合导航算法,该算法利用EKF滤波器估计载体速度,并通过残差卡方检测识别NLOS误差,采用α-β滤波器平滑位置估计,有效提高了导航系统的鲁棒性。
本文介绍了一种结合UWB与IMU的紧组合导航算法,该算法利用EKF滤波器估计载体速度,并通过残差卡方检测识别NLOS误差,采用α-β滤波器平滑位置估计,有效提高了导航系统的鲁棒性。
1 简介
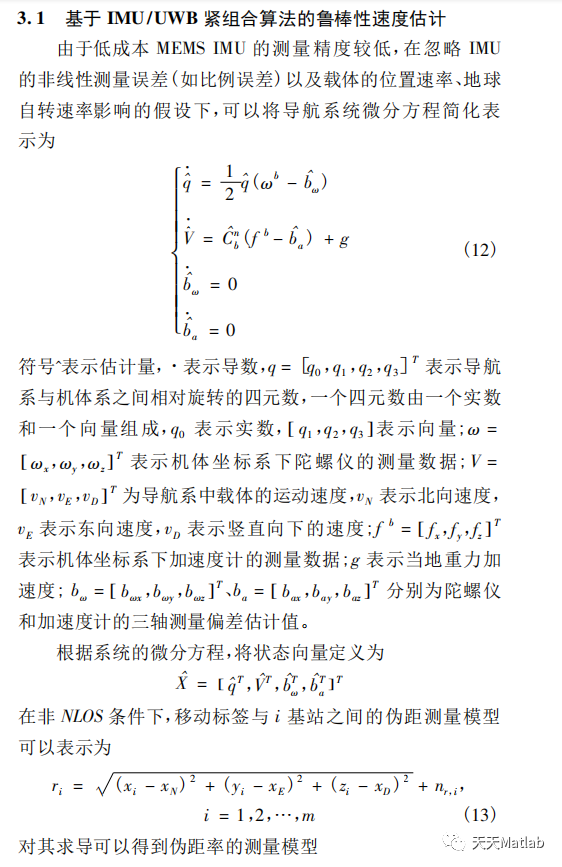
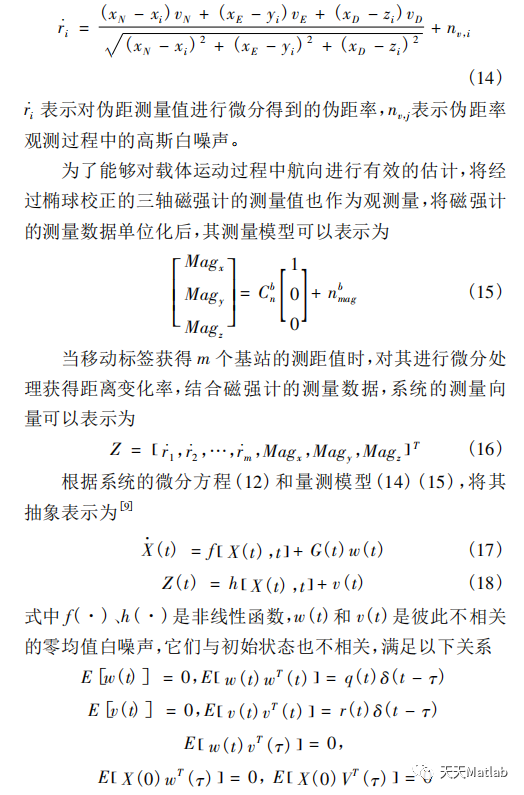
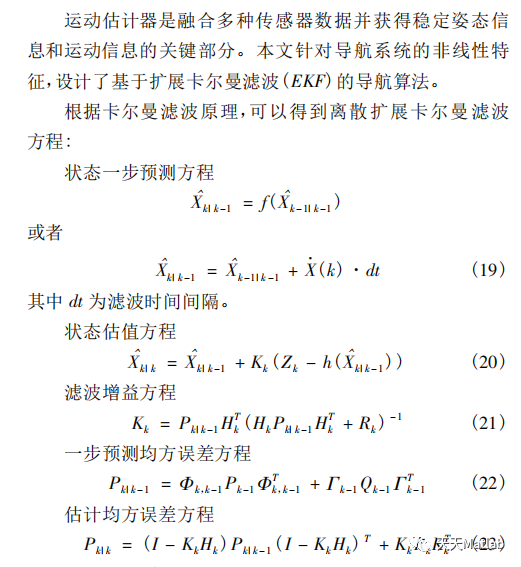
基于 UWB 无线电技术的小区域导航技术已被愈发广泛的应用于实际场景中,然而 NLOS 误差严重会影响到系统的速度与位置的估计精度。为了提高 UWB 导航系统的鲁棒性,利用 EKF 滤波器实现 UWB /IMU 的紧组合,对载体的速度进行估计,并基于残差卡方检测原理判别是否出现 NLOS,通过减小异常测量值的权重来减弱 NLOS 对载体速度估计的影响。而后设计 α - β 滤波器,融合载体的速度信息,对由牛顿迭代法求解的位置估计结果进行平滑处理。仿真结果表明,设计的算法能够有效抑制 NLOS 干扰对载体速度估计的影响,有助于进一步实现无人设备在小区域内的内外环控制任务。

2 部分代码
clc
clear all
close all
global UKF;
addpath('ekfukf');
load('ground_truth.mat')
% Measurement model and it's derivative
f_func = @ekf_ins_f;
df_dx_func = @ekf_err_ins_f;
h_func = @ekf_uwb_h;
dh_dx_func = @ekf_err_uwb_h;
% anchor position
UKF.BSOneCoordinate = [9.21;1.08;-0.17];%4.08
UKF.BSTwoCoordinate = [0;0;-1.885];
UKF.BSThreeCoordinate = [0;6.281;-1.37];
UKF.BSFourCoordinate = [1.705;12.88;-2.27];
UKF.BSFiveCoordinate = [9.31;11.59;-0.52];
UKF.BaseS_Position = [UKF.BSOneCoordinate,UKF.BSTwoCoordinate,...
UKF.BSThreeCoordinate,UKF.BSFourCoordinate,...
UKF.BSFiveCoordinate]*30;
UKF.bSPcs = 5;
% download the sensor data
matfile = dir('*_HandledFileToMatData.mat');
if isempty(matfile)
disp(' None Found *_HandledFileToMatData.mat')
end
for ki=1:size(matfile)
load(matfile(ki).name)
end
% initialization
ProcessNoiseVariance = [3.9e-04 4.5e-4 7.9e-4; %%%Accelerate_Variance
1.9239e-7, 3.5379e-7, 2.4626e-7;%%%Accelerate_Bias_Variance
8.7e-04,1.2e-03,1.1e-03; %%%Gyroscope_Variance
1.3111e-9,2.5134e-9, 2.4871e-9 %%%Gyroscope_Bias_Variance
];
Q = [ diag(ProcessNoiseVariance(1,:)),zeros(3,12);
zeros(3,3), diag(ProcessNoiseVariance(1,:)),zeros(3,9);
zeros(3,6), diag(ProcessNoiseVariance(3,:)),zeros(3,6);
zeros(3,9), diag(ProcessNoiseVariance(2,:)),zeros(3,3);
zeros(3,12), diag(ProcessNoiseVariance(4,:))];
MeasureNoiseVariance =[2.98e-03,2.9e-03,...
1.8e-03,1.2e-03,...
2.4e-03];%%%%uwb ranging noise
R = diag(MeasureNoiseVariance);
Position_init =[20;100;-1.9]; deta_Position_init = [0;0;0];
Speed_init = [0;0;0]; deta_Speed_init = [0;0;0];
Accelerate_Bias_init = [0;0;0]; deta_Accelerate_Bias_init = [0;0;0];
Gyroscope_Bias_init = [0;0;0]; deta_Gyroscope_Bias_init = [0;0;0];
Quaternion_init = [1,0,0,0]'; deta_Quaternion_init = [0;0;0;0];
% state init x0 and P0
X0 = [Position_init;Speed_init;Accelerate_Bias_init;Gyroscope_Bias_init;Quaternion_init];
StaticBiasAccelVariance =[6.7203e-5, 8.7258e-5, 4.2737e-5];
StaticBiasGyroVariance = [2.2178e-5, 5.9452e-5, 1.3473e-5];
init_c = 0.1;
P0 = [init_c*eye(3,3),zeros(3,12);
zeros(3,3) , 1e-2*init_c*eye(3,3),zeros(3,9);
zeros(3,6), 1e-2*init_c* eye(3,3),zeros(3,6);
zeros(3,9), diag(StaticBiasGyroVariance),zeros(3,3);
zeros(3,12), diag( StaticBiasAccelVariance);
];
% Initial guesses for the state mean and covariance.
X = [2;2;-3;zeros(3,1);10/180*pi;-10/180*pi;20/180*pi;...
sqrt(StaticBiasAccelVariance').*randn(3,1);
sqrt(StaticBiasGyroVariance').*randn(3,1)
];
dX = [zeros(9,1);
sqrt(StaticBiasAccelVariance').*randn(3,1);
sqrt(StaticBiasGyroVariance').*randn(3,1)];
MM(:,k) = X;
PP(:,:,k) = P;
imu_iter = imu_iter + 1;
end
MM(7:9,:)= MM(7:9,:)/pi*180;
noise = noise';
for uwb_iter=1:4:length(UWBBroadTime_vector)-10
Z_meas = diag(Uwbranging_vector(uwb_iter:uwb_iter+4,:) + noise(uwb_iter:uwb_iter+4,:)) ;
uwbxyz = triangulate(Z_meas);
UWBXYZ = [UWBXYZ,[UWBBroadTime_vector(uwb_iter+2);uwbxyz;TraceData(4*(uwb_iter+2)+1,2:4)']];
end
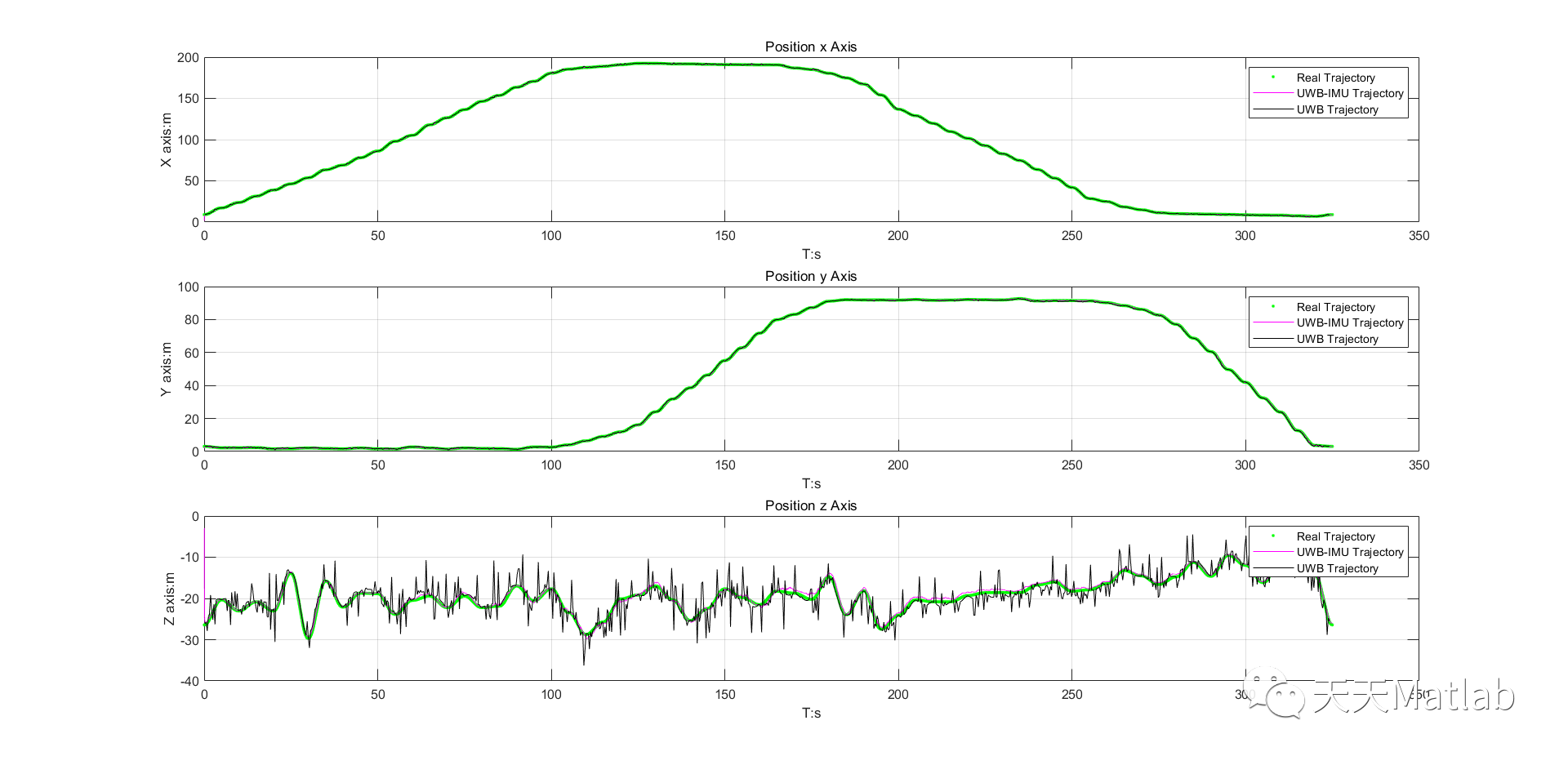
%-------------- figure 1: display trajectory ----------------------%
base = 1;
figure(1)
subplot(311)
plot(TraceData(:,1),TraceData(:,base+1),'g.')
hold on
plot(SampleTimePoint(1:Pcs),MM(base,:),'m')
plot(UWBXYZ(1,:),UWBXYZ(2,:),'k')
title('Position x Axis');xlabel('T:s');ylabel('X axis:m');grid on;
legend('Real Trajectory','UWB-IMU Trajectory','UWB Trajectory')
subplot(312)
plot(TraceData(:,1),TraceData(:,base+2),'g.')
hold on
plot(SampleTimePoint(1:Pcs),MM(base+1,:),'m')
plot(UWBXYZ(1,:),UWBXYZ(3,:),'k')
title('Position y Axis');xlabel('T:s');ylabel('Y axis:m');grid on;
legend('Real Trajectory','UWB-IMU Trajectory','UWB Trajectory')
subplot(313)
plot(TraceData(:,1),TraceData(:,base+3),'g.')
hold on
plot(SampleTimePoint(1:Pcs),MM(base+2,:),'m')
plot(UWBXYZ(1,:),UWBXYZ(4,:),'k')
title('Position z Axis');xlabel('T:s');ylabel('Z axis:m');grid on;
legend('Real Trajectory','UWB-IMU Trajectory','UWB Trajectory')
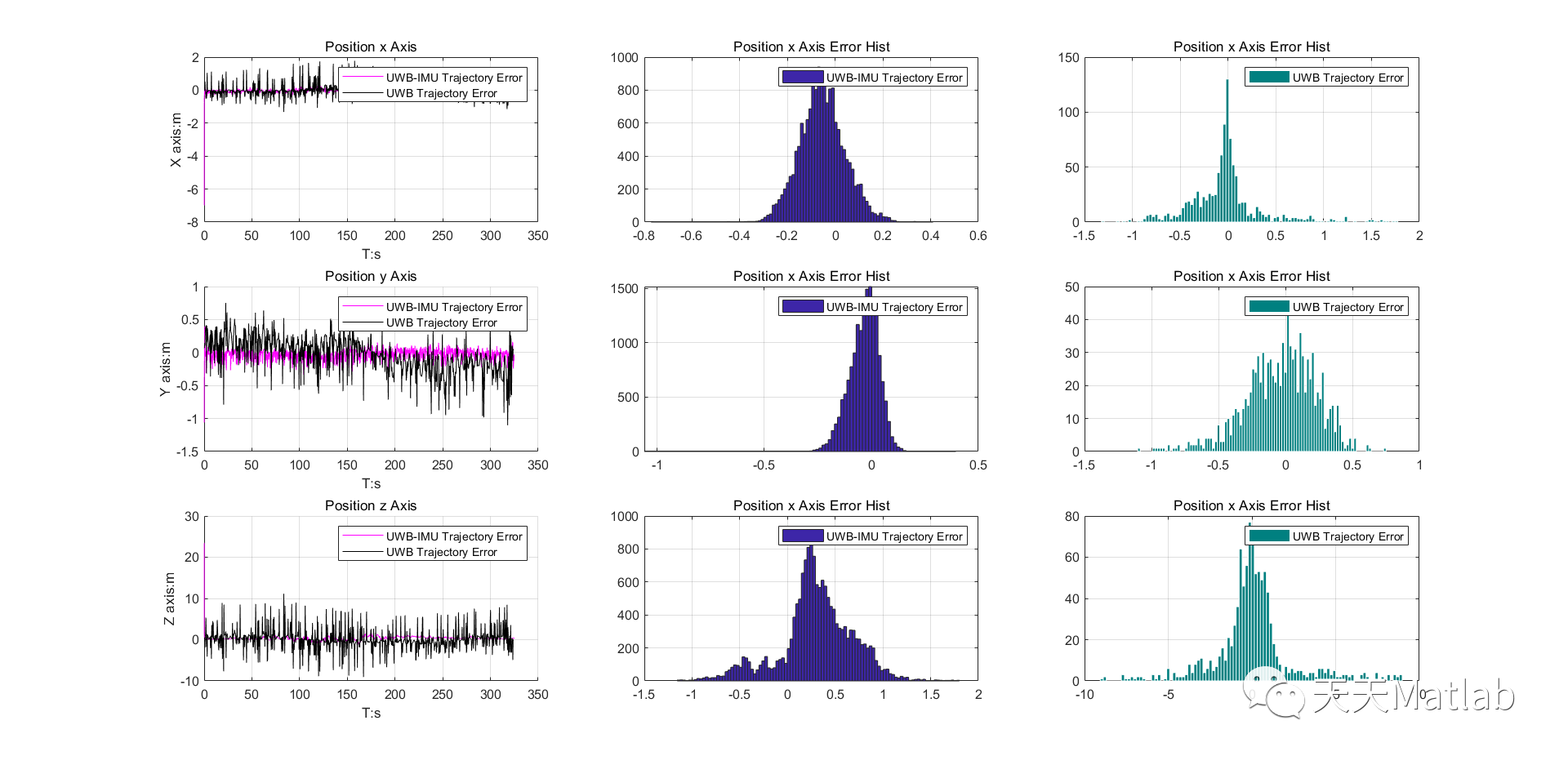
%-------------- figure 2: display trajectory error -----------------%
base = 1;
figure(2)
subplot(331)
plot(SampleTimePoint(1:Pcs),MM(base,:)'- TraceData(:,base+1),'m');
hold on
plot(UWBXYZ(1,:),UWBXYZ(2,:) - UWBXYZ(5,:),'k')
title('Position x Axis');xlabel('T:s');ylabel('X axis:m');grid on;
legend('UWB-IMU Trajectory Error','UWB Trajectory Error')
subplot(332)
xvalues1 = -3:0.2:3;
error = MM(base,:)'- TraceData(:,base+1);
hist(error(find(error < 3 & error > -3)),100);
title('Position x Axis Error Hist');grid on;
legend('UWB-IMU Trajectory Error')
h=subplot(333);
error =UWBXYZ(2,:) - UWBXYZ(5,:);
hist(error(find(error < 3 & error > -3)),100);
hp = findobj(h,'Type','patch');
set(hp,'FaceColor',[0 .5 .5],'EdgeColor','w')
title('Position x Axis Error Hist');grid on;
legend('UWB Trajectory Error')
subplot(334)
hold on
plot(SampleTimePoint(1:Pcs),MM(base+1,:)' - TraceData(:,base+2),'m')
plot(UWBXYZ(1,:),UWBXYZ(3,:) - UWBXYZ(6,:),'k')
title('Position y Axis');xlabel('T:s');ylabel('Y axis:m');grid on;
legend('UWB-IMU Trajectory Error','UWB Trajectory Error')
subplot(335)
xvalues1 = -3:0.2:3;
error = MM(base+1,:)'- TraceData(:,base+2);
hist(error(find(error < 3 & error > -3)),100);
title('Position x Axis Error Hist');grid on;
legend('UWB-IMU Trajectory Error')
h=subplot(336);
error =UWBXYZ(3,:) - UWBXYZ(6,:);
hist(error(find(error < 3 & error > -3)),100);
hp = findobj(h,'Type','patch');
set(hp,'FaceColor',[0 .5 .5],'EdgeColor','w')
title('Position x Axis Error Hist');grid on;
legend('UWB Trajectory Error')
subplot(337)
hold on
plot(SampleTimePoint(1:Pcs),MM(base+2,:)' - TraceData(:,base+3),'m')
plot(UWBXYZ(1,:),UWBXYZ(4,:) - UWBXYZ(7,:),'k')
title('Position z Axis');xlabel('T:s');ylabel('Z axis:m');grid on;
legend('UWB-IMU Trajectory Error','UWB Trajectory Error')
subplot(338)
xvalues1 = -10:0.2:10;
error = MM(base+2,:)'- TraceData(:,base+3);
hist(error(find(error < 10 & error > -10)),100);
title('Position x Axis Error Hist');grid on;
legend('UWB-IMU Trajectory Error')
h=subplot(339);
error =UWBXYZ(4,:) - UWBXYZ(7,:);
hist(error(find(error < 10 & error > -10)),100);
hp = findobj(h,'Type','patch');
set(hp,'FaceColor',[0 .5 .5],'EdgeColor','w')
title('Position x Axis Error Hist');grid on;
legend('UWB Trajectory Error')
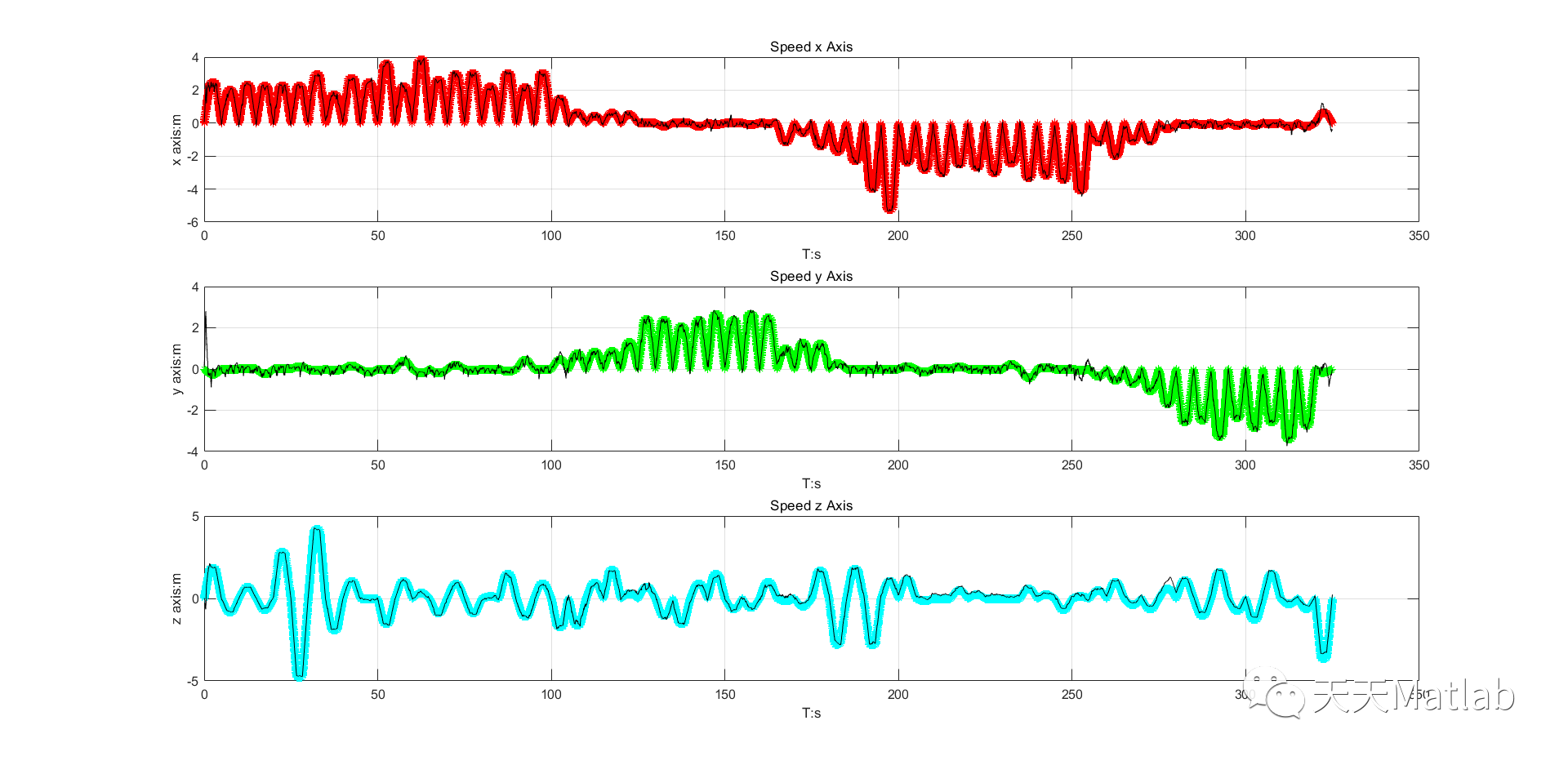
%-------------- figure 3: display Speed state -----------------%
base = 4;
figure(3)
subplot(311)
plot(TraceData(:,1),TraceData(:,base+1),'r*');grid on
hold on
plot(SampleTimePoint(1:Pcs),MM(base,:),'k')
title('Speed x Axis');xlabel('T:s');ylabel('x axis:m');grid on;
subplot(312)
plot(TraceData(:,1),TraceData(:,base+2),'g*');grid on
hold on
plot(SampleTimePoint(1:Pcs),MM(base+1,:),'k')
title('Speed y Axis');xlabel('T:s');ylabel('y axis:m');grid on;
subplot(313)
plot(TraceData(:,1),TraceData(:,base+3),'c*');grid on
hold on
plot(SampleTimePoint(1:Pcs),MM(base+2,:),'k')
title('Speed z Axis');xlabel('T:s');ylabel('z axis:m');grid on;
%-------------- figure 4: display Pose state -----------------%
base = 7;
figure(4)
subplot(311)
plot(TraceData(:,1),TraceData(:,base+1),'r*')
hold on;grid on;
plot(SampleTimePoint(1:Pcs),MM(base,:),'k')
title('Euler');grid on;
legend('Real Atti','UWB-IMU Atti')
subplot(312)
plot(TraceData(:,1),TraceData(:,base+2),'g*')
hold on
plot(SampleTimePoint(1:Pcs),MM(base+1,:),'k')
title('Euler');grid on;
legend('Real Atti','UWB-IMU Atti')
subplot(313)
plot(TraceData(:,1),TraceData(:,base+3),'c*')
hold on
plot(SampleTimePoint(1:Pcs),MM(base+2,:),'k')
title('Euler');grid on;
legend('Real Atti','UWB-IMU Atti')
%-------------- figure 5: display estimated accel bias ----------%
base = 10;
figure(5)
subplot(311)
plot(TraceData(:,1),TraceData(:,base+1),'r*')
hold on
plot(SampleTimePoint(1:Pcs),MM(base,:),'k')
title('Accel Bias');grid on;
legend('Real Error','UWB-IMU Error')
subplot(312)
plot(TraceData(:,1),TraceData(:,base+2),'g*')
hold on
plot(SampleTimePoint(1:Pcs),MM(base+1,:),'k')
title('Accel Bias');grid on;
legend('Real Error','UWB-IMU Error')
subplot(313)
plot(TraceData(:,1),TraceData(:,base+3),'c*')
hold on
plot(SampleTimePoint(1:Pcs),MM(base+2,:),'k')
title('Accel Bias');grid on;
legend('Real Error','UWB-IMU Error')
%-------------- figure 6: display estimated gyro bias ----------%
base = 13;
figure(6)
subplot(311)
plot(TraceData(:,1),TraceData(:,base+1),'r*')
hold on
plot(SampleTimePoint(1:Pcs),MM(base,:),'k')
title('Gyro Bias');grid on;
legend('Real Error','UWB-IMU Error')
subplot(312)
plot(TraceData(:,1),TraceData(:,base+2),'g*')
hold on
plot(SampleTimePoint(1:Pcs),MM(base+1,:),'k')
title('Gyro Bias');grid on;
legend('Real Error','UWB-IMU Error')
subplot(313)
plot(TraceData(:,1),TraceData(:,base+3),'c*')
hold on
plot(SampleTimePoint(1:Pcs),MM(base+2,:),'k')
title('Gyro Bias');grid on;
legend('Real Error','UWB-IMU Error')
3 仿真结果
4 参考文献



















 1426
1426

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











