







1 简介
从粒子惯性质量的修正、粒子的精英保留策略以及粒子的全局记忆能力出发,针对 GSA 算法的加速机制和全局搜索策略做相应改进,可得到结合PSO 算法和 GSA 算法优点的 PSO-GSA 算法。
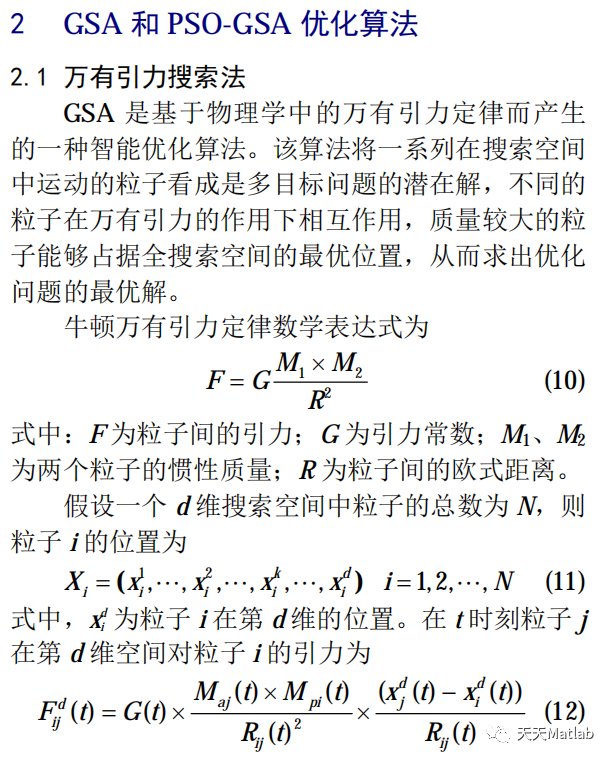
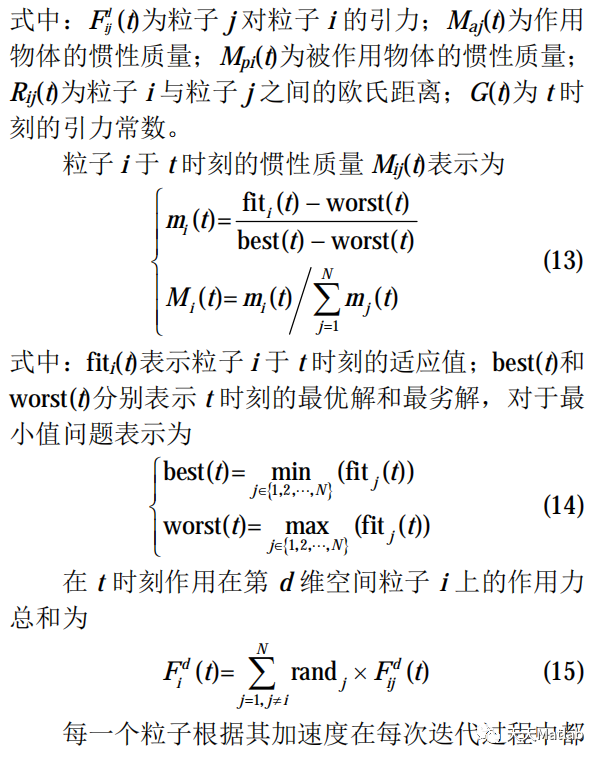

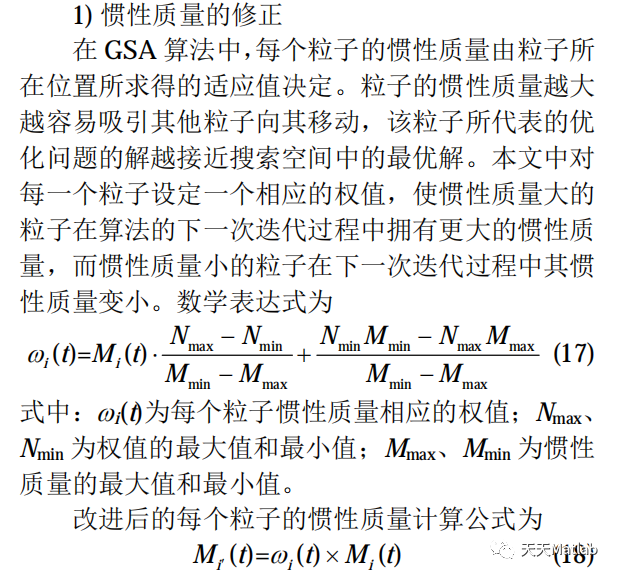
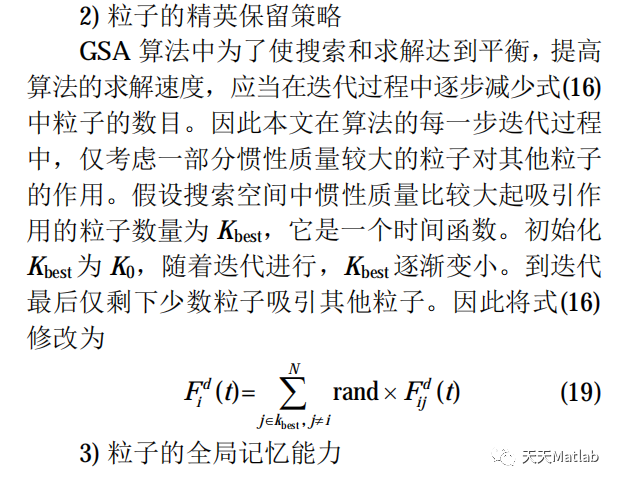

2 部分代码
%PSOGSA source code v3.0, Generated by SeyedAli Mirjalili, 2011.
%Adopted from: S. Mirjalili, S.Z. Mohd Hashim, 揂 New Hybrid PSOGSA
%Algorithm for Function Optimization, in IEEE International Conference
%on Computer and Information Application?ICCIA 2010), China, 2010, pp.374-377.
clear all
clc
N = 30; % Size of the swarm " no of objects "
Max_Iteration = 1000; % Maximum number of "iterations"
Benchmark_Function_ID=1 %Benchmark function ID
[gBestScore,gBest,GlobalBestCost]= PSOGSA(Benchmark_Function_ID, N, Max_Iteration)
gBest
gBestScore
semilogy(GlobalBestCost,'-r');
title(['\fontsize{12}\bf Benchmark Function: F',num2str(Benchmark_Function_ID)]);
xlabel('\fontsize{12}\bf Iteration');ylabel('\fontsize{12}\bf Fitness(Best-so-far)');
legend('\fontsize{10}\bf PSOGSA',1);
3 仿真结果

4 参考文献
[1]巢渊, 戴敏, 陈恺, 陈平, & 张志胜. (2015). 基于广义反向粒子群与引力搜索混合算法的多阈值图像分割. 光学精密工程, 23(3), 8.
















 133
133











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











