






✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
智能优化算法 神经网络预测 雷达通信 无线传感器 电力系统
信号处理 图像处理 路径规划 元胞自动机 无人机
🔥 内容介绍
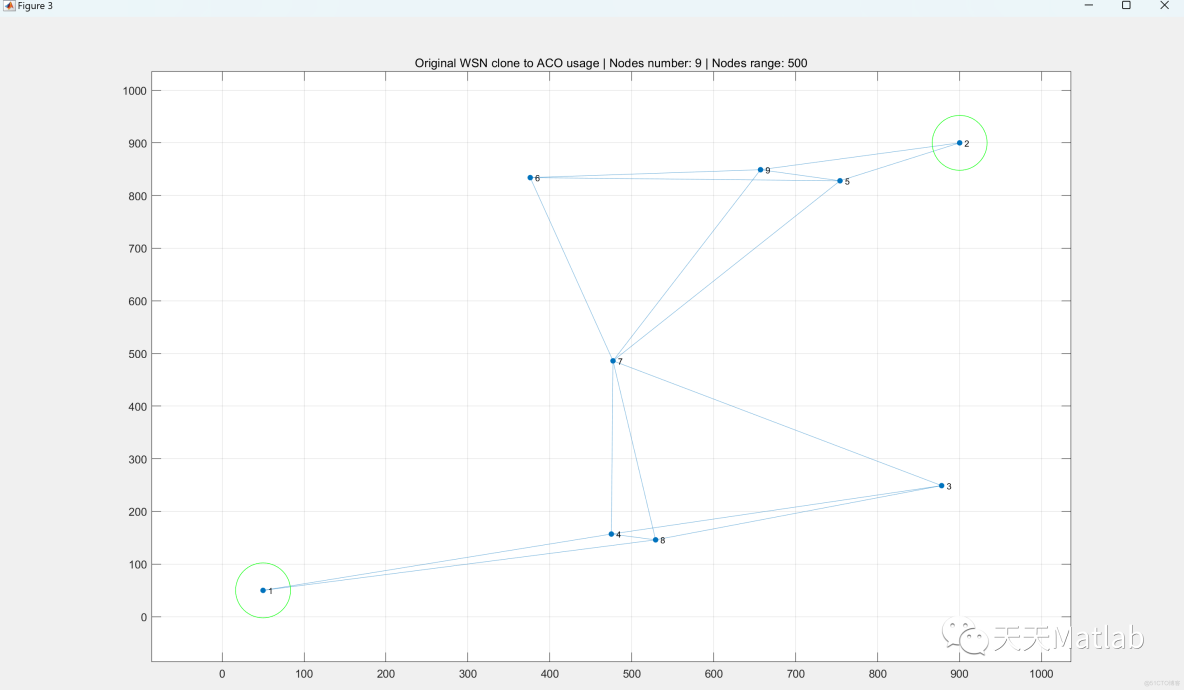
在无线传感器网络(Wireless Sensor Network,WSN)中,能量消耗是一个重要的问题,因为传感器节点通常是由有限的电池供电。为了延长网络的寿命,研究者们一直在寻找有效的路由协议来减少节点的能量消耗。本文将介绍一种基于蚁群算法的方法,用于求解WSN路由协议中的能量消耗问题。
蚁群算法是一种启发式算法,灵感来自于蚂蚁在寻找食物时的行为。蚂蚁通过释放信息素来引导其他蚂蚁找到最短路径。类似地,蚁群算法通过模拟蚂蚁的行为,来解决优化问题。在WSN中,我们可以将传感器节点看作蚂蚁,节点之间的通信路径看作信息素。通过模拟蚂蚁的行为,我们可以找到能够最大程度减少能量消耗的路由路径。
在使用蚁群算法解决WSN路由协议能量消耗问题时,首先需要定义适当的目标函数。目标函数可以是最小化整个网络的能量消耗,或者是最小化单个节点的能量消耗。根据具体情况,我们可以选择不同的目标函数。
接下来,我们需要定义蚂蚁的行为规则。蚂蚁在搜索过程中会根据信息素的浓度选择路径。为了模拟这一行为,我们可以使用一些启发式规则来指导蚂蚁选择路径。例如,我们可以让蚂蚁更倾向于选择能量消耗较低的路径。
在每一轮搜索过程中,蚂蚁会根据信息素浓度和启发式规则选择下一步的路径。当蚂蚁到达目的地时,它会释放信息素,并且信息素的浓度会根据路径的能量消耗进行更新。通过多轮迭代,信息素的浓度会逐渐趋于稳定,最终形成一条能够最大程度减少能量消耗的路由路径。
蚁群算法在求解WSN路由协议能量消耗问题中具有一定的优势。首先,它能够全局优化,找到整个网络的最优解。其次,蚁群算法是一种分布式算法,不需要全局信息,每个节点只需要局部信息即可实现优化。此外,蚁群算法具有自适应性,能够适应网络拓扑的变化。
然而,蚁群算法也存在一些挑战和限制。首先,蚁群算法的搜索过程可能会较慢,特别是在网络规模较大时。其次,蚁群算法的性能高度依赖于参数的选择和调整。如果参数选择不当,可能会导致算法陷入局部最优解。
综上所述,基于蚁群算法的WSN路由协议能量消耗研究是一个值得探索的领域。通过模拟蚂蚁的行为,蚁群算法能够找到能够最大程度减少能量消耗的路由路径,从而延长整个网络的寿命。然而,蚁群算法的性能仍然需要进一步研究和改进,以提高搜索效率和解决参数选择的问题。
希望本文能够为WSN路由协议能量消耗研究提供一些启示和参考,促进该领域的发展和创新。
📣 部分代码
function [pile, intermediate_piles] = resolvePeaks(pile, peak_pos, nbr_pos)
%resolvePeaks - Resolve all peaks in a pile
%
% Syntax: [pile, intermediate_piles] = resolvePeaks(pile, peak_pos)
%
% Inputs:
% pile - Matrix of shape (pile width, pile width,
% no. of history time steps), with integer values from 0 to 4
% peak_pos - Vector containing positions of all peaks
%
% Outputs:
% pile - Matrix of shape (pile width, pile width), with integer values
% from 0 to 4, with peaks in initial pile resolved (might now contain
% peaks resulting from resolving the initial peaks)
% intermediate_piles - Matrix of shape (pile width, pile width, no. of
% intermediate time steps), with integer values from 0 to 4, containing
% all intermediate steps taken in resolving the peaks
%
% Example:
% [pile, intermediate_piles] = resolvePeaks([4 1;3 2], 1)
%
% Other m-files required: none
% Subfunctions: none
% MAT-files required: none
%
% See also: scanPileForPeaks
%
% Author: Florian Roscheck
% Website: http://github.com/flrs/visual_sandpile
% January 2017; Last revision: 27-January-2017
%------------- BEGIN CODE --------------
%% initialize
pile_width = size(pile,1);
prealloc_size = round(pile_width^1.3); % preallocate empty array depending
% on pile side length, it is
% expected that no. of piles
% increases exponentially with pile
% side length, exponent 1.3 is
% arbitrary and a tradeoff between
% unneccessarily slow intialization
% and unneccessary overhead when
% expanding the array later in the
% code
intermediate_piles = zeros(pile_width,pile_width,prealloc_size);
intermediate_pile_ct = 1;
peak_pattern = [0 1 0;1 -4 1;0 1 0;]; % pattern for resolving peaks,
% characteristic of Abelian sandpile
pile_frame = zeros(pile_width+2); % construct frame around pile to catch
% falling off the grid
pile_frame(2:end-1,2:end-1) = pile; % insert pile into frame
%% process peaks
% resolve peaks one by one
for peak = 1:numel(peak_pos)
% fast ind2sub (see http://tipstrickshowtos.blogspot.com/2011/09/fast-r
% eplacement-for-ind2sub.html, checked on 2017-01-26)
peakY = rem(peak_pos(peak)-1, pile_width)+1;
peakX = (peak_pos(peak)-peakY)/pile_width + 1;%寻找雪崩点的坐标
% resolve peaks
z = zeros(3);
index = peak_pos(peak);
nbr = nbr_pos(index);
z(5) = -1;
z(nbr) = 1;
peak_pattern = z;
pile_frame(peakY:peakY+2, peakX:peakX+2) = ...
pile_frame(peakY:peakY+2, peakX:peakX+2)+z;
% extract new pile from frame
pile = pile_frame(2:end-1, 2:end-1);
% expand intermediate pile array when it has reached its size limit
if intermediate_pile_ct>size(intermediate_piles, 3)
intermediate_piles = ...
cat(3, intermediate_piles, ...
zeros(pile_width, pile_width, prealloc_size));
end
% append new pile to intermediate pile array
intermediate_piles(:, :, intermediate_pile_ct) = pile;
intermediate_pile_ct = intermediate_pile_ct+1;
end
if intermediate_pile_ct>1
% eliminate unused, preallocated entries from intermediate pile array
intermediate_piles = ...
intermediate_piles(:, :, 1:intermediate_pile_ct-1);
else
% no piles resolved
intermediate_piles = [];
end
end⛳️ 运行结果
🔗 参考文献
[1] 米奕萍.基于改进型蚁群算法的WSN路由算法的研究[D].中北大学[2023-09-20].DOI:CNKI:CDMD:2.1012.336755.
[2] 李昊,戴天虹,高丽娜.基于改进蚁群算法的WSN路由协议的研究[J].控制工程, 2017, 24(11):5.DOI:10.14107/j.cnki.kzgc.140839.
[3] 廖明华,张华,谢建全.基于蚁群算法的WSN能量预测路由协议[J].计算机工程, 2012, 38(3):88-90.DOI:10.3969/j.issn.1000-3428.2012.03.030.
















 470
470











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











