







✅作者简介:热爱科研的Matlab仿真开发者,修心和技术同步精进,matlab项目合作可私信。
🍎个人主页:Matlab科研工作室
🍊个人信条:格物致知。
更多Matlab完整代码及仿真定制内容点击👇
🔥 内容介绍
在现代技术的帮助下,无人机已经成为了许多行业的重要工具。无人机的使用范围越来越广泛,不仅用于军事侦察和打击,还用于民用领域,如航拍、物流和农业等。随着LTE技术的发展,无人机可以通过LTE网络进行控制和通信。因此,对于无人机的飞行模拟和测试显得尤为重要。在本文中,我们将介绍如何使用Simulink实现LTE-UAV无人机飞行模拟。
首先,我们需要了解什么是Simulink。Simulink是MATLAB的一个扩展工具箱,它可以用于建立、模拟和分析动态系统模型。Simulink提供了一个可视化的环境,使用户能够使用块图形式来表示系统模型。这使得模型的构建变得简单易懂。
接下来,我们需要了解什么是LTE。LTE是一种无线通信技术,它是第四代移动通信技术的一部分。LTE具有高速数据传输、低时延和高可靠性等特点,这使得它成为了控制无人机的理想选择。
在Simulink中,我们可以使用LTE System Toolbox来建立LTE网络模型。该工具箱提供了一系列的LTE模块,包括物理层、MAC层和RLC层等。我们可以使用这些模块来构建LTE网络模型,然后将其与无人机模型相结合,以实现无人机的飞行模拟。
在建立LTE网络模型之前,我们需要确定无人机的模型。无人机的模型包括飞行控制系统、传感器和执行器等。在Simulink中,我们可以使用Aerospace Blockset来建立无人机模型。该工具箱提供了一系列的航空航天模块,包括飞行器动力学、姿态控制和传感器模型等。我们可以使用这些模块来构建无人机模型。
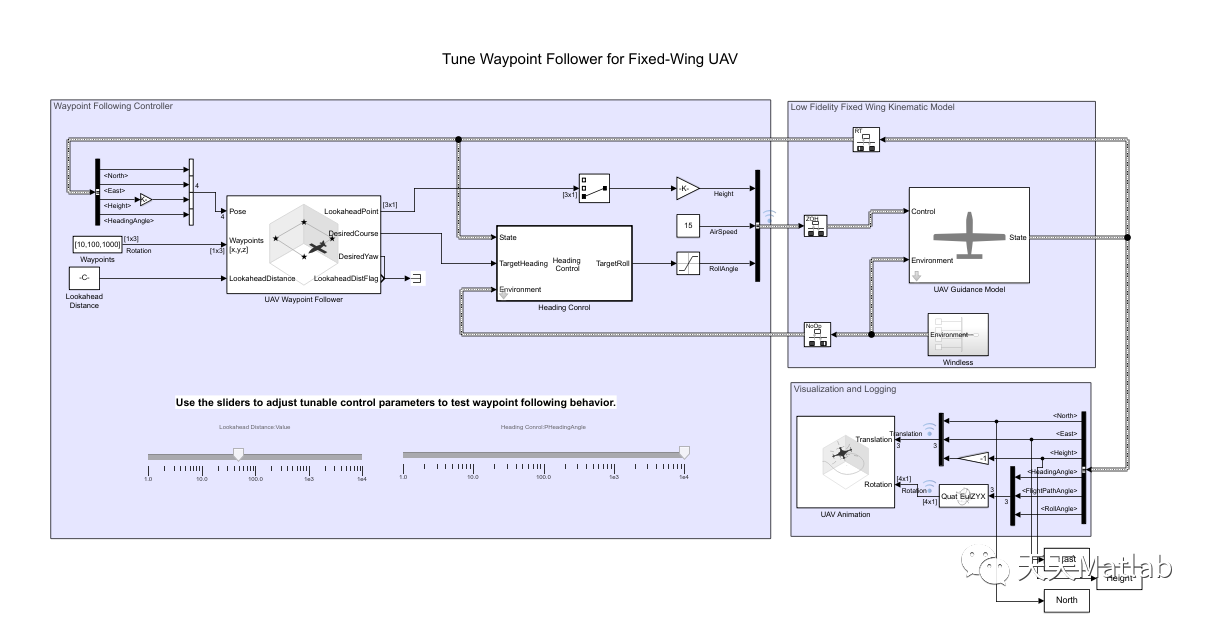
在建立无人机模型和LTE网络模型之后,我们需要将它们相结合。我们可以使用Simulink的信号传输模块来连接无人机模型和LTE网络模型。然后,我们可以使用Simulink的仿真功能来模拟无人机的飞行过程。
在无人机飞行模拟中,我们需要考虑许多因素,如风速、气压和温度等。在Simulink中,我们可以使用气象模块来模拟这些因素。该模块提供了一系列的气象模型,包括大气模型、风场模型和温度模型等。我们可以使用这些模型来模拟不同的气象条件,以测试无人机的性能。
在模拟无人机飞行过程中,我们需要考虑无人机的飞行路径和任务。在Simulink中,我们可以使用路径规划模块来规划无人机的飞行路径。该模块提供了一系列的路径规划算法,包括A*算法、Dijkstra算法和快速探索算法等。我们可以使用这些算法来规划无人机的飞行路径。此外,我们还可以使用任务规划模块来规划无人机的任务。该模块提供了一系列的任务规划算法,包括最小时间算法、最小能量算法和最小路径算法等。我们可以使用这些算法来规划无人机的任务,以测试无人机的性能。
总之,使用Simulink实现LTE-UAV无人机飞行模拟是一项非常有挑战性的任务。在模拟过程中,我们需要考虑许多因素,如无人机模型、LTE网络模型、气象条件、飞行路径和任务等。通过使用Simulink的各种模块,我们可以构建一个完整的无人机飞行模拟系统,以测试无人机的性能。
📣 部分代码
%% %% Tetcos owns the intellectual property rights in the Product and its content. %% The copying, redistribution, reselling or publication of any or all of the %% Product or its content without express prior written consent of Tetcos is %% prohibited. Ownership and / or any other right relating to the software and all %% intellectual property rights therein shall remain at all times with Tetcos. %% %% Author: Vishal Bhat %% %% ---------------------------------------------------------------------------------%% This function is used to initialize and start Simulink model called in NetSim- init_uav() function.function out = opSimulink% Initiating UAV 1model='UAV_Test';load_system(model);set_param(model,'SimulationCommand','start')set_param(model,'SimulationCommand','pause')out=1;end
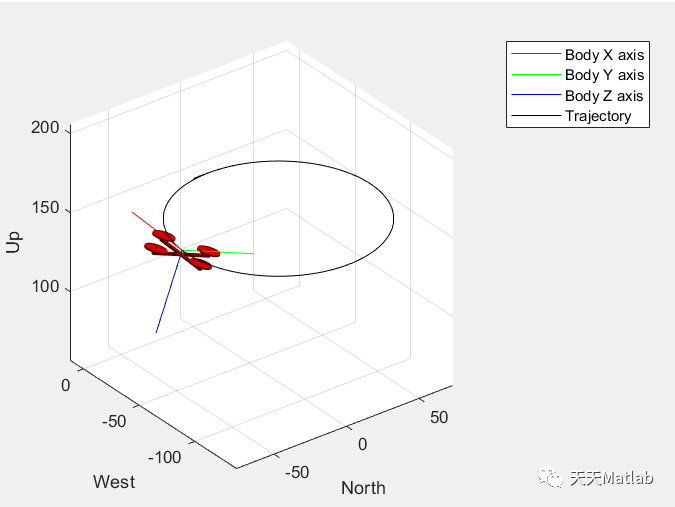
⛳️ 运行结果
🔗 参考文献
[1]耿通奋,黄大庆.基于Simulink的无人机自主飞行全程仿真研究[J].航空计算技术, 2010, 40(5):5.DOI:CNKI:SUN:HKJJ.0.2010-05-031.
















 754
754











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











