









前言:定时器TIM的详细知识点见我的博文:11.TIM定时中断-CSDN博客
STM32定时器时间计算公式

公式解释:
ARR(TIM_Period):自动重装载值,是定时器溢出前的计数值
PSC(TIM_Prescaler):预分频值,是用来降低定时器时钟频率的参数
Tclk:定时器的输入时钟频率(单位Mhz),通常为系统时钟频率或者定时器外部时钟频率
Tout:定时器溢出时间(单位us)。一定要注意这个单位是us
公式由来:
1.定时器的时钟频率是Tclk,TIM_Prescaler即为PSC的值。时钟频率被分频了PSC+1,那么此时定时器的最终频率为 ,故可知定时器计数值加1所需的时间为
,故可知定时器计数值加1所需的时间为
注:时间等于频率的倒数
2.自动重装载值即TIM_Period即ARR,定时器从0计数到ARR时清零。由第一步已经计算出了被分频了PSC+1的最终定时器的时钟频率为,这是计数一次的频率,则计数到ARR的时间为 为(ARR + 1) / (时间等于频率的倒数),故定时器溢出时间(单位us)为Tout=((ARR+1)*(PSC+1)) / Tclk。
理论联系实际,来加深理解,接下来使用STM32CubeMx + Keil来实现TIM中断实现1s计时一次。
TIM中断实现1s计时一次
前言:使用的是STM32f103c8t6,系统主频72Mhz
目标:实现TIM中断实现1s计时一次
主要过程:配置定时器溢出时间为10ms(即定时器计数一次10ms,也就是10ms的定时器中断),当计次100次时是1s(1000ms),进而通过置标志位来实现1s的其它操作。
STM32CubeMx HAL库程序举例
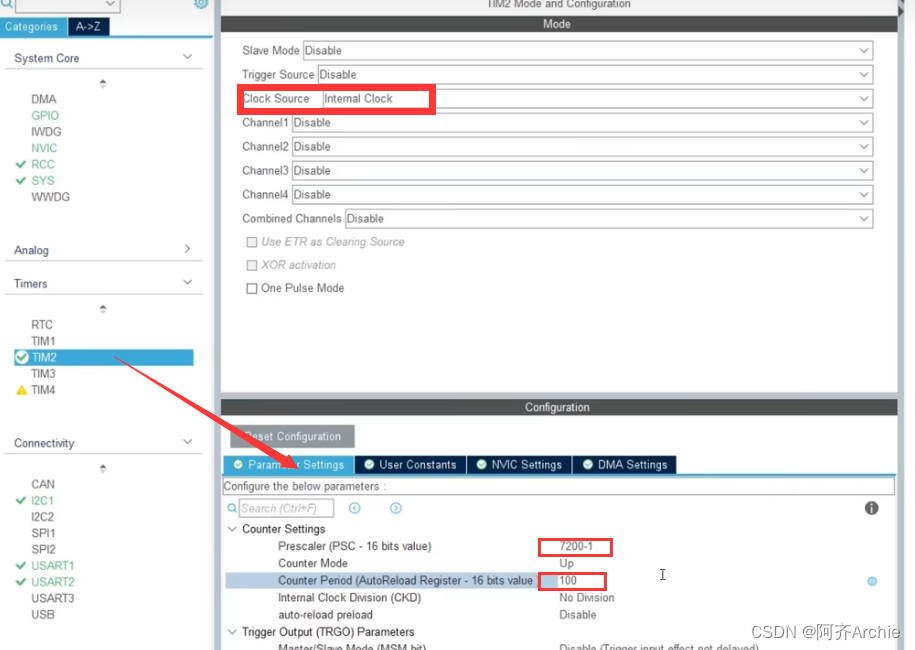
1.在STM32CubeMx中选择TIM2,设置Period(ARR)为7200,设置Prescaler(PSC)为100,根据公式计算得定时器溢出时间即定时器的中断时间(单位us)为, 最后结果为10 000 us,即10ms。
注意:下图中的Prescaler(PSC)设置为100-1
对应的代码以及具体配置如下所示(HAL库版本),这段代码是一个使用TIM2定时器进行初始化配置的函数。
具体配置如下:
设置TIM2的时钟源配置为默认值。
设置TIM2的主配置为默认值。
对htim2即TIM_HandleTypeDef类型的结构体变量进行初始化配置:设置htim2的实例为TIM2。
设置htim2的预分频器为7200-1,这将把输入时钟频率除以7200来得到TIM2的时钟频率。
设置htim2的计数模式为向上计数模式TIM_COUNTERMODE_UP。
设置htim2的计数器周期为100,这意味着当计数器达到100时,将发生定时器事件(溢出或中断)。
设置htim2的时钟分频因子为TIM_CLOCKDIVISION_DIV1即无时钟分频。
禁用htim2的自动重装载预装载功能TIM_AUTORELOAD_PRELOAD_DISABLE。这意味着在更新事件时,直接将新的周期值加载到计数器。
void MX_TIM2_Init(void)
{
TIM_ClockConfigTypeDef sClockSourceConfig = {0};
TIM_MasterConfigTypeDef sMasterConfig = {0};
htim2.Instance = TIM2;
htim2.Init.Prescaler = 7200-1;
htim2.Init.CounterMode = TIM_COUNTERMODE_UP;
htim2.Init.Period = 100-1;
htim2.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1;
htim2.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE;
}2.写定时器2中断服务函数,10ms一次中断。这段代码是在定时器2的周期到达时触发的回调函数。在每次定时器2的周期到达时,回调函数`HAL_TIM_PeriodElapsedCallback()`会被调用。代码以及具体流程如下。
具体代码流程如下:
首先判断触发回调函数的定时器实例是否是htim2。如果是htim2实例,即定时器2的周期到达,进入下一步。
`index_10ms`变量自增1,表示经过了10毫秒。
如果`index_10ms`变量的值能够被100整除(即经过了1秒),则将`index_led`变量设置为1。
这段代码的作用是,每隔10毫秒触发一次定时器2的中断服务函数。通过`index_10ms`变量来计数,当计数到100时(经过1秒),将`index_led`变量置为1。
在实际应用中,可以根据`index_led`变量的值来控制相关的LED灯或者执行其他操作,实现定时任务的触发和事件响应。
static uint16_t index_10ms = 0;
uint16_t index_led = 0;
/**
* @brief 定时器2中断服务函数,10ms一次中断
* @param[in] htim:定时器
* @retval none
*/
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if (htim->Instance == htim2.Instance)
{
index_10ms++;
if(index_10ms%100==0)
{
index_led=1;
}
}
}3.利用定时器中断来写你自己定义的功能函数。我写的功能函数是实现1s打印一次hello,word。
这段代码其中的逻辑是通过检测外部定义的`index_led`变量的值来执行特定的操作。代码以及具体流程如下。
具体代码流程如下:
- 当`index_led`变量的值为1时,执行以下操作:
- 打印输出"hello,world"字符串。
- 将`index_led`变量的值重新设置为0,表示已经处理过这次触发。
这段程序逻辑的作用是在每次`index_led`变量变为1时,打印输出"hello,world"字符串,并且只执行一次,直到下次`index_led`又变为1。
extern uint16_t index_led;
uint8_t led_status =0;
/**
* @brief 自定义功能函数
* @param[in] none
* @retval none
*/
void user(void)
{
if(index_led==1)
{
printf("hello,world\r\n");
index_led=0;
}
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
标准库程序举例
Timer.c文件
#include "stm32f10x.h" // Device header
#include "sys.h"
/**
* 函 数:定时中断初始化
* 参 数:无
* 返 回 值:无
*/
void Timer_Init(void)
{
/*开启时钟*/
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE); //开启TIM2的时钟
/*配置时钟源*/
TIM_InternalClockConfig(TIM2); //选择TIM2为内部时钟,若不调用此函数,TIM默认也为内部时钟
/*时基单元初始化*/
TIM_TimeBaseInitTypeDef TIM_TimeBaseInitStructure; //定义结构体变量
TIM_TimeBaseInitStructure.TIM_ClockDivision = TIM_CKD_DIV1; //时钟分频,选择不分频,此参数用于配置滤波器时钟,不影响时基单元功能
TIM_TimeBaseInitStructure.TIM_CounterMode = TIM_CounterMode_Up; //计数器模式,选择向上计数
TIM_TimeBaseInitStructure.TIM_Period = 7199; //计数周期,即ARR的值
TIM_TimeBaseInitStructure.TIM_Prescaler = 99; //预分频器,即PSC的值
TIM_TimeBaseInitStructure.TIM_RepetitionCounter = 0; //重复计数器,高级定时器才会用到
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseInitStructure); //将结构体变量交给TIM_TimeBaseInit,配置TIM2的时基单元
/*中断输出配置*/
TIM_ClearFlag(TIM2, TIM_FLAG_Update); //清除定时器更新标志位
//TIM_TimeBaseInit函数末尾,手动产生了更新事件
//若不清除此标志位,则开启中断后,会立刻进入一次中断
//如果不介意此问题,则不清除此标志位也可
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE); //开启TIM2的更新中断
/*NVIC中断分组*/
//即抢占优先级范围:0~3,响应优先级范围:0~3
//此分组配置在整个工程中仅需调用一次
//若有多个中断,可以把此代码放在main函数内,while循环之前
//若调用多次配置分组的代码,则后执行的配置会覆盖先执行的配置
/*NVIC配置*/
NVIC_InitTypeDef NVIC_InitStructure; //定义结构体变量
NVIC_InitStructure.NVIC_IRQChannel = TIM2_IRQn; //选择配置NVIC的TIM2线
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //指定NVIC线路使能
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //指定NVIC线路的抢占优先级为2
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; //指定NVIC线路的响应优先级为1
NVIC_Init(&NVIC_InitStructure); //将结构体变量交给NVIC_Init,配置NVIC外设
/*TIM使能*/
TIM_Cmd(TIM2, ENABLE); //使能TIM2,定时器开始运行
}
使用void TIM2_IRQHandler(void)函数
void TIM2_IRQHandler(void)
{
if (TIM_GetITStatus(TIM2, TIM_IT_Update) == SET)
{
index_10ms++;
if(index_10ms%100==0)
{
shuayadaojishi--;
}
TIM_ClearITPendingBit(TIM2, TIM_IT_Update);
}
}



















 1128
1128

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











