







C 语言实现卡尔曼滤波项目详解
一、项目背景与概述
卡尔曼滤波器是一种递归算法,用于在有噪声的测量数据中估计系统状态。它在控制系统、信号处理、导航与定位等领域有着广泛的应用。卡尔曼滤波器利用预测与更新两大步骤,将测量值与系统模型相结合,从而在噪声背景下获得更精确的状态估计。
本项目采用 C 语言实现一个简单的一维卡尔曼滤波器,适用于对一个随时间变化的标量状态进行估计。示例中假设系统状态为一个常数(例如某个物理量的稳定值),并引入过程噪声和测量噪声。程序将通过一系列带噪声的测量值,通过卡尔曼滤波获得状态的最佳估计。
项目主要内容包括:
- 数据结构设计:定义卡尔曼滤波器数据结构,保存状态估计、估计误差协方差以及噪声协方差等参数。
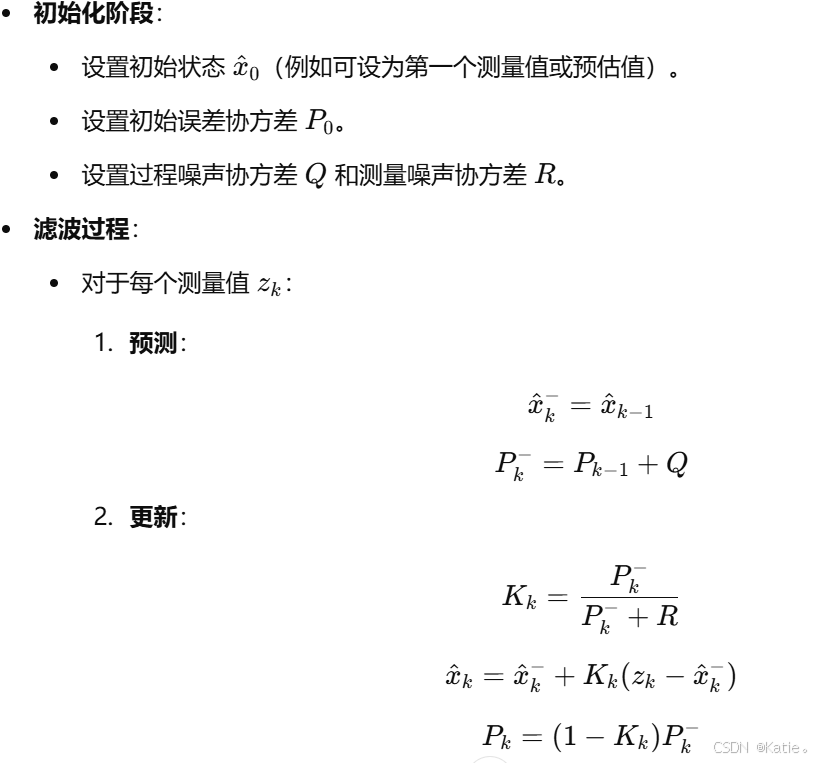
- 滤波器初始化:设置初始状态、误差协方差、过程噪声和测量噪声等参数。
- 预测与更新算法实现:分别实现卡尔曼滤波器的预测(Prediction)和更新(Update)步骤。
- 示例测试:在主函数中模拟一系列带噪声的测量值,通过卡尔曼滤波获得状态估计,并输出对比原始测量值与滤波结果。
该项目适合作为 C 语言初学者了解状态估计和滤波算法的入门案例,同时也为更复杂的多维卡尔曼滤波提供基础。
二、项目实现思路
1. 卡尔曼滤波器数学原理(以一维为例)
对于一维系统,设系统状态为 x ,系统模型简单设为:
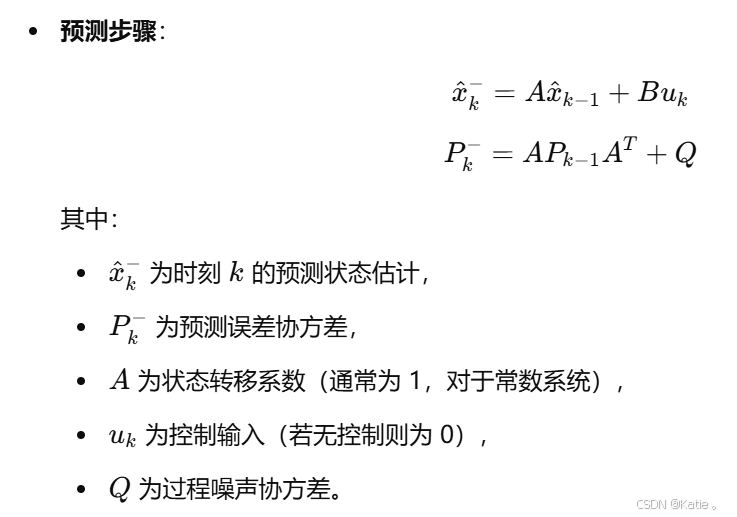
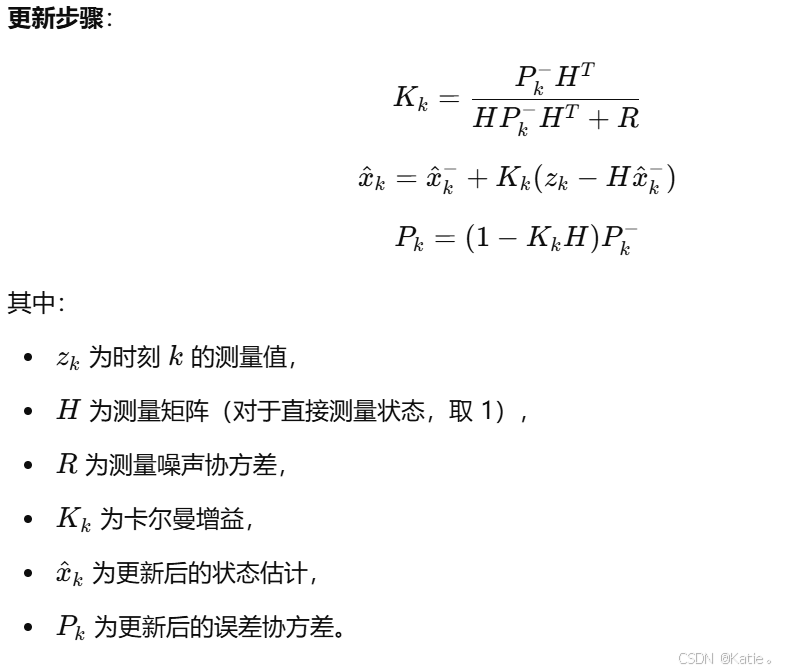
对于本项目,假设系统状态为常数(状态转移系数 A=1),没有控制输入(B u_k = 0),测量直接观测状态(H=1)。
2. 算法实现流程
-
-
结果输出:
- 输出每个时刻的滤波器状态估计
 以及卡尔曼增益 K_k 等信息,与原始测量值对比。
以及卡尔曼增益 K_k 等信息,与原始测量值对比。
- 输出每个时刻的滤波器状态估计
3. 数据结构设计
定义一个结构体 KalmanFilter 来保存:
- 当前状态估计 x
- 当前估计误差协方差 P
- 过程噪声协方差 Q
- 测量噪声协方差 R
- 卡尔曼增益 K
三、完整代码(附详细注释)
下面给出完整的 C 语言代码示例,实现了简单的一维卡尔曼滤波器。代码中包含详细注释,解释每个步骤的实现原理。
/********************************************************************
* C语言实现一维卡尔曼滤波器
*
* 本程序实现了一个简单的一维卡尔曼滤波器,
* 用于估计一个常数状态在带噪测量中的真实值。
*
* 系统模型假设:
* 状态转移: x_k = x_{k-1} (A = 1)
* 测量模型: z_k = x_k + v_k (H = 1),其中 v_k 为测量噪声
*
* 卡尔曼滤波公式:
* 预测: x_k^- = x_{k-1}
* P_k^- = P_{k-1} + Q
* 更新: K_k = P_k^- / (P_k^- + R)
* x_k = x_k^- + K_k * (z_k - x_k^-)
* P_k = (1 - K_k) * P_k^-
*
* 编译方法: gcc -o kalman kalman.c -lm
* 运行方法: ./kalman
********************************************************************/
#include <stdio.h>
#include <stdlib.h>
// 定义卡尔曼滤波器数据结构
typedef struct {
double x; // 状态估计
double P; // 估计误差协方差
double Q; // 过程噪声协方差
double R; // 测量噪声协方差
double K; // 卡尔曼增益
} KalmanFilter;
/*
* 函数:KalmanFilter_Init
* 功能:初始化卡尔曼滤波器
* 参数:
* kf - 指向 KalmanFilter 结构体的指针
* init_x - 初始状态估计
* init_P - 初始估计误差协方差
* Q - 过程噪声协方差
* R - 测量噪声协方差
*/
void KalmanFilter_Init(KalmanFilter *kf, double init_x, double init_P, double Q, double R) {
kf->x = init_x;
kf->P = init_P;
kf->Q = Q;
kf->R = R;
kf->K = 0.0;
}
/*
* 函数:KalmanFilter_Update
* 功能:使用卡尔曼滤波器对新的测量值进行更新
* 参数:
* kf - 指向 KalmanFilter 结构体的指针
* z - 新的测量值
* 返回值:
* 更新后的状态估计
*
* 实现步骤:
* 1. 预测: x_prior = x, P_prior = P + Q
* 2. 计算卡尔曼增益: K = P_prior / (P_prior + R)
* 3. 更新状态估计: x = x_prior + K * (z - x_prior)
* 4. 更新估计误差协方差: P = (1 - K) * P_prior
*/
double KalmanFilter_Update(KalmanFilter *kf, double z) {
// 预测步骤
double x_prior = kf->x;
double P_prior = kf->P + kf->Q;
// 更新步骤
kf->K = P_prior / (P_prior + kf->R);
kf->x = x_prior + kf->K * (z - x_prior);
kf->P = (1 - kf->K) * P_prior;
return kf->x;
}
/*
* 函数:main
* 功能:程序入口,演示一维卡尔曼滤波器的使用
*
* 实现步骤:
* 1. 初始化卡尔曼滤波器参数
* 2. 模拟一系列带噪测量值
* 3. 依次调用 KalmanFilter_Update() 对测量值进行滤波更新
* 4. 打印每一步的测量值和滤波后的状态估计
*/
int main() {
// 设置卡尔曼滤波器参数
double init_x = 0.0; // 初始状态估计
double init_P = 1.0; // 初始估计误差协方差
double Q = 0.001; // 过程噪声协方差
double R = 0.1; // 测量噪声协方差
KalmanFilter kf;
KalmanFilter_Init(&kf, init_x, init_P, Q, R);
// 模拟一系列带噪测量值(假设真实状态为 10)
double measurements[] = {10.2, 9.8, 10.5, 10.0, 9.7, 10.3, 10.1, 9.9, 10.4, 10.0};
int num_measurements = sizeof(measurements) / sizeof(measurements[0]);
printf("卡尔曼滤波器初始状态: x = %.3f, P = %.3f\n\n", kf.x, kf.P);
printf("测量值\t滤波后估计值\t卡尔曼增益\t估计误差协方差\n");
for (int i = 0; i < num_measurements; i++) {
double z = measurements[i];
double x_est = KalmanFilter_Update(&kf, z);
printf("%.3f\t%.3f\t\t%.3f\t\t%.3f\n", z, x_est, kf.K, kf.P);
}
return 0;
}
四、代码解读(方法作用解析)
1. KalmanFilter_Init() — 初始化卡尔曼滤波器
- 主要功能:
初始化卡尔曼滤波器结构体,设置初始状态估计 x、初始误差协方差 P 以及过程噪声协方差 Q 和测量噪声协方差 R。 - 实现细节:
将传入参数赋值给滤波器结构体的各个成员,并将卡尔曼增益 K 初始化为 0。
2. KalmanFilter_Update() — 卡尔曼滤波更新函数
- 主要功能:
对于每次新的测量值 zzz,根据卡尔曼滤波算法执行预测和更新步骤,更新状态估计 x 及估计误差协方差 P,同时计算卡尔曼增益 K。 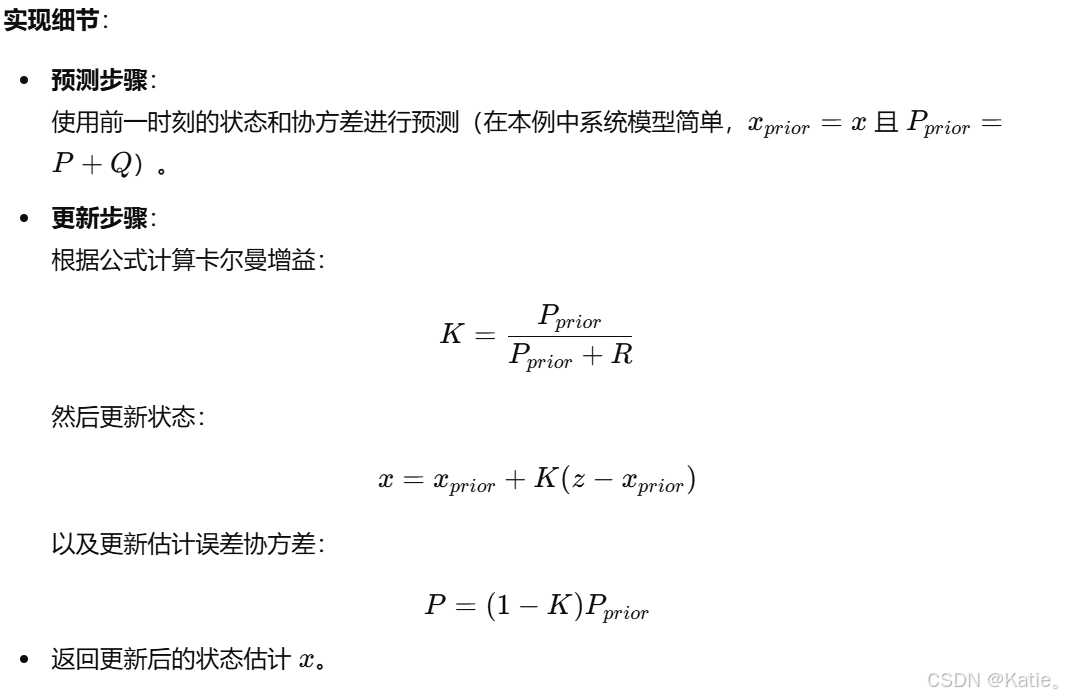
3. main() — 主函数
- 主要功能:
模拟一系列带噪测量值,并使用卡尔曼滤波器对这些测量值进行状态估计更新。 - 实现细节:
- 初始化卡尔曼滤波器参数(初始状态、初始误差协方差、过程噪声和测量噪声)。
- 定义一组测量值数组(例如模拟真实状态为 10 的场景,但每个测量值带有噪声)。
- 循环调用
KalmanFilter_Update()对每个测量值进行更新,并打印出每一步的测量值、滤波后的估计值、卡尔曼增益以及更新后的误差协方差,便于观察滤波器收敛过程。
五、项目总结
1. 项目特色
- 简单直观:
采用一维卡尔曼滤波器作为示例,代码结构清晰,易于理解卡尔曼滤波的基本思想。 - 模块化设计:
滤波器初始化、更新等功能被封装在独立函数中,便于代码复用和后续扩展至多维滤波器。 - 实际应用基础:
卡尔曼滤波在导航、信号处理等领域有着广泛应用,本项目为进一步研究复杂滤波器提供了基础。
2. 可扩展优化方向
- 多维卡尔曼滤波:
可将一维滤波器扩展到二维或多维状态向量,以处理更复杂的系统状态。 - 模型改进:
根据实际系统设计更准确的状态转移模型和测量模型,调整参数 Q 和 R 以获得更优性能。 - 实时处理:
将该算法集成到实时系统中,对连续测量数据进行在线滤波。 - 算法性能优化:
对于大规模数据处理,可采用矩阵运算库优化卡尔曼滤波计算效率。
3. 个人收获
- 通过本项目深入理解了卡尔曼滤波的数学原理和递归算法实现方法。
- 掌握了如何在 C 语言中使用结构体、函数模块化设计以及数值计算方法。
- 项目为信号处理、导航与控制等领域的进一步研究打下了坚实基础。
六、结语
本文详细介绍了如何使用 C 语言实现卡尔曼滤波器,从项目背景、实现思路、完整代码到详细函数解析,全面展示了一维卡尔曼滤波的基本实现过程。希望这篇博客文章能够为你提供有价值的参考,并激发你对状态估计、信号处理及算法设计的兴趣。

















 1748
1748

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









