






 本文介绍了如何使用PCL库解决激光SLAM获取的倾斜点云问题,通过RANSAC方法拟合平面,计算法向量,然后旋转点云使其水平,便于后续矢量地图标注和路径规划。
本文介绍了如何使用PCL库解决激光SLAM获取的倾斜点云问题,通过RANSAC方法拟合平面,计算法向量,然后旋转点云使其水平,便于后续矢量地图标注和路径规划。
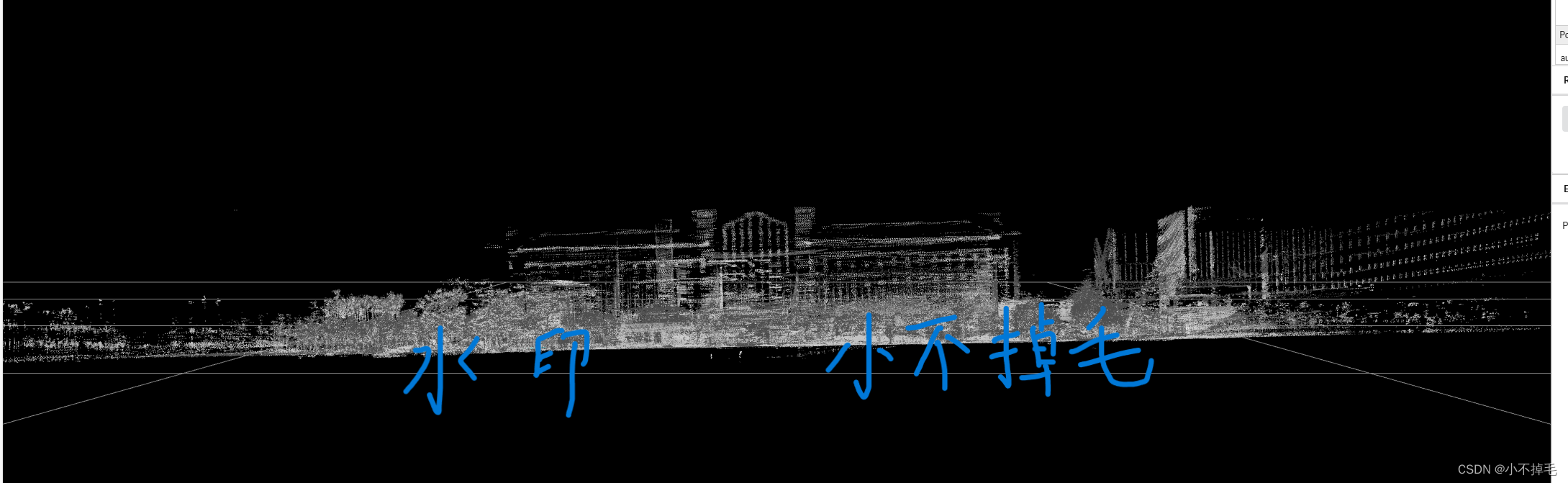
我们在拿到用激光SLAM方法得到的全局地图时,往往由于安装传感器倾斜,地面不水平等等原因导致整体得到的点云也是倾斜的,这不方便我们对地图后续的工作如矢量地图标注及路径规划等,所以我们须将点云地图校准为水平状态。
这里采用常见的点云处理库PCL(Point Cloud Library),安装部分不再赘述,CSDN上有很多教程,博主采用的是Ubuntu18.04+PCL1.9+VScodeIDE的方式,其中VScode只能用CMAKE来进行编译。博主也是新人,大家相互交流。建议大家学完PCL的官方IO教程并学会打印出自己的点云文件数据后(此时你已经受过了配置环境的痛苦),再来看本篇博客
校准思路:求得原始点云地图最下方的倾斜底面的平面方程,求其法向量,计算法向量与Z轴的角度,最后根据角度求得旋转矩阵随后变换即可。
实践:建议哪里不懂直接问chatgpt就好,3.5就行,效率神器
(1)PCL是一个模块化的库,拟合平面采用RANSAC(Random Sample Consensus)方法,包含文件如下:
#include <iostream>
#include <pcl/ModelCoefficients.h>
#include <pcl/io/pcd_io.h>
#include <pcl/point_types.h>
#include <pcl/common/geometry.h>
#include <pcl/sample_consensus/method_types.h>
#include <pcl/sample_consensus/model_types.h>
#include <pcl/segmentation/sac_segmentation.h>
#include <pcl/common/transforms.h>
#include <pcl/common/common.h> (2)现在编写一个函数用来求拟合平面,主要的思路是对加载的点云数据进行循环遍历,筛选出满足特定条件的点,并将这些点存储到 in_cloud 中。在这个例子中,条件是点的 x 坐标小于 20 并且点的 y 坐标的绝对值小于 5:
void ransac_plane(const std::string& pcd_file_path, pcl::ModelCoefficients::Ptr coefficients, Eigen::Vector3f& plane_normal)
{
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
//如果读取失败,打印报错提示
if (pcl::io::loadPCDFile<pcl::PointXYZ>(pcd_file_path, *cloud) == -1)
{
PCL_ERROR("Couldn't read file %s\n", pcd_file_path.c_str());
return;
}
pcl::PointCloud<pcl::PointXYZ>::Ptr in_cloud(new pcl::PointCloud<pcl::PointXYZ>);
for (int i = 0; i < cloud->size(); i++)
{
if (cloud->points[i].x < 20 && abs(cloud->points[i].y) < 5)
{
in_cloud->push_back(cloud->points[i]);
}
}
pcl::PointIndices::Ptr idx(new pcl::PointIndices);
pcl::SACSegmentation<pcl::PointXYZ> seg;
seg.setOptimizeCoefficients(true);
seg.setModelType(pcl::SACMODEL_PLANE);
seg.setMethodType(pcl::SAC_RANSAC);
seg.setDistanceThreshold(0.01);
seg.setInputCloud(in_cloud);
seg.segment(*idx, *coefficients);
//传入法向量
plane_normal << coefficients->values[0], coefficients->values[1], coefficients->values[2];
}(3)编写函数主入口:
int main(int argc, char **argv)
{
//首先将函数参数实例化,设定为自己的点云文件路径
std::string pcd_file_path = "你的文件路径(可采用终端中的pwd命令获取)";
//创建一个智能化指针,用来存放函数运行后产生的系数
pcl::ModelCoefficients::Ptr coefficients(new pcl::ModelCoefficients);
//主函数中仍须定义目标平面的法向量
Eigen::Vector3f plane_normal;
//调用函数
ransac_plane(pcd_file_path, coefficients,plane_normal);
if (coefficients->values.empty())
{
std::cerr << "Failed to estimate a planar model from the input point cloud." << std::endl;
return (-1);
}
// 计算平面法向量与Z轴之间的角度
double angle = atan2(plane_normal(0), plane_normal(2));
//以下有点小错误,因为我们只能绕Y轴和Z轴去转,所以应该通过立体几何的知识计算一下两次旋转的角度,懒得改了,大家可以去问chat
//创建一个变换矩阵
Eigen::Affine3f transform = Eigen::Affine3f::Identity();
transform.rotate(Eigen::AngleAxisf(angle, Eigen::Vector3f::UnitY()));
pcl::PointCloud<pcl::PointXYZ>::Ptr cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::io::loadPCDFile(pcd_file_path, *cloud);
// 对点云进行变换
pcl::PointCloud<pcl::PointXYZ>::Ptr transform_cloud(new pcl::PointCloud<pcl::PointXYZ>);
pcl::transformPointCloud(*cloud, *transform_cloud, transform);
// 将变换后的点云保存
std::string output_file_path = "你想保存的校准后的点云地址";
pcl::io::savePCDFileASCII(output_file_path, *transform_cloud);
std::cout << "变换后的点云已保存至:" << output_file_path << std::endl;
return (0);
}(4)最后编译运行就可以啦,附上CMakeLists代码
cmake_minimum_required(VERSION 2.6 FATAL_ERROR)
project(MY_GRAND_PROJECT)
find_package(PCL 1.3 REQUIRED COMPONENTS common io)
include_directories(${PCL_INCLUDE_DIRS})
link_directories(${PCL_LIBRARY_DIRS})
add_definitions(${PCL_DEFINITIONS})
add_executable(你想生成的可执行文件 你的cpp文件)
target_link_libraries(你想生成的可执行文件 ${PCL_LIBRARIES} ${Boost_LIBRARIES} ${PCL_COMMON_LIBRARIES} ${PCL_IO_LIBRARIES} pcl_segmentation -L/usr/lib/x86_64-linux-gnu/)最后,点赞收藏量较多的话我再出个可视化教程啥的,新人求支持!求SCUT校友支持!祝顺风顺水顺SCI!!!















 6947
6947

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









