







1.数据同信方式:
按数据通信方式分类,可分为串行通信和并行通信两种。串行和并行的对比如下图所示:
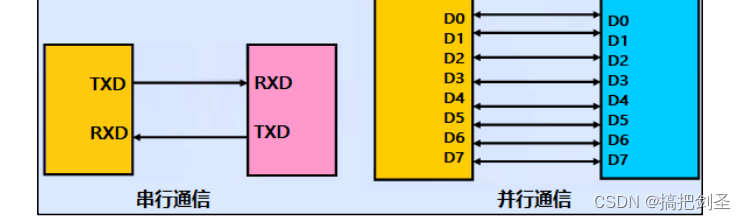
串行通信的基本特征是数据逐位顺序依次传输,优点是传输线少、布线成本低、灵活度高 等优点,一般用于近距离人机交互,特殊处理后也可以用于远距离,缺点就是传输速率低。 而并行通信是数据各位可以通过多条线同时传输,优点是传输速率高,缺点就是布线成本 高,抗干扰能力差因而适用于短距离、高速率的通信。
2. 数据传输方向:
根据数据传输方向,通信又可分为全双工、半双工和单工通信。全双工、半双工和单工通 信的比较如下图所示:
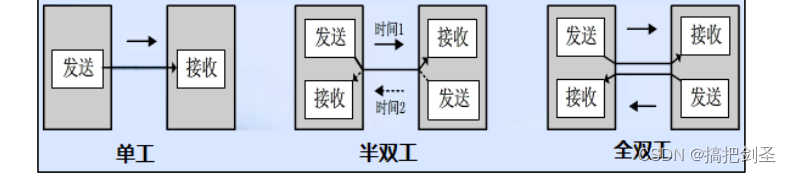
单工是指数据传输仅能沿一个方向,不能实现反方向传输,如校园广播。 半双工是指数据传输可以沿着两个方向,但是需要分时进行,如对讲机。 全双工是指数据可以同时进行双向传输,日常的打电话属于这种情形。 这里注意全双工和半双工通信的区别:半双工通信是共用一条线路实现双向通信,而全双 工是利用两条线路,一条用于发送数据,另一条用于接收数据。
3. 数据同步方式:
根据数据同步方式,通信又可分为同步通信和异步通信。同步通信和异步通信比较如下图 所示:
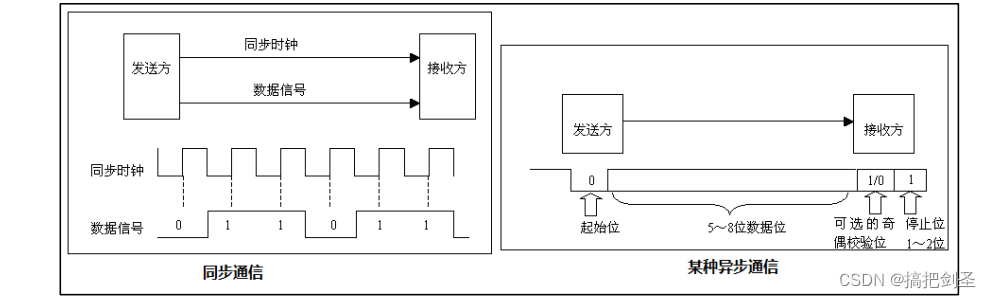
同步通信要求通信双方共用同一时钟信号,在总线上保持统一的时序和周期完成信息传输。 优点:可以实现高速率、大容量的数据传输,以及点对多点传输。缺点:要求发送时钟和接收 时钟保持严格同步,收发双方时钟允许的误差较小,同时硬件复杂。 异步通信不需要时钟信号,而是在数据信号中加入开始位和停止位等一些同步信号,以便 使接收端能够正确地将每一个字符接收下来,某些通信中还需要双方约定传输速率。优点:没 有时钟信号硬件简单,双方时钟可允许一定误差。缺点:通信速率较低,只适用点对点传输。
4. 通信速率:
(1)传信率:每秒钟传输的信息量,即每秒钟传输的二进制位数,单位为 bit/s(即比特每秒), 因而又称为比特率。
(2)传码率:每秒钟传输的码元个数,单位为 Baud(即波特每秒),因而又称为波特率。
(3)比特率和波特率的关系可以用以下式子表示: 比特率 = 波特率 * log2M
5.串口:
(1)按位发送数据和接受的接口
(2) RS232 数据线:TXD/RXD,信号地GND
(3)STM32串口与电脑通信: 使用CH340等USB/串口转换芯片,TXD和RXD必须交差连接。
6.RS232异步通信协议:
启动位:必须占一个位长,保持逻辑0电平
有效数据位:可选5,6,7,8,9个位长,LSB在前,MSB在后
校验位:可选1个位长,也可以没有该位
停止位:必须有,可选0.5,1,1.5, 2个位长,保持逻辑1电平
7.STM32的USART简介:
USART通用异步收发器。
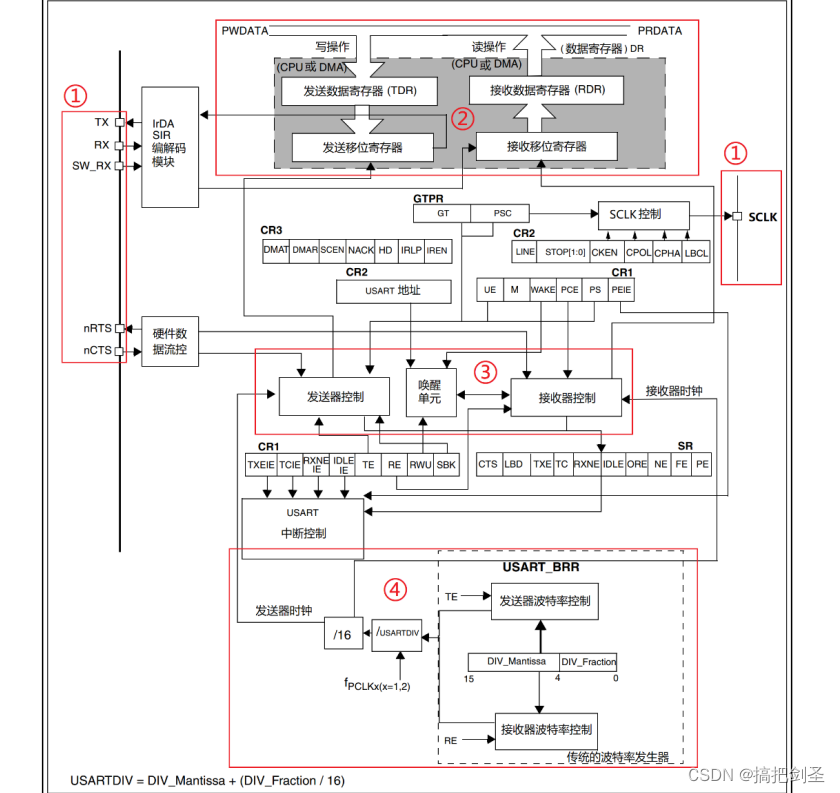
8.设置USART的波特率:
baud=fck/(16*USARTDIV)
下面举个例子说明: 当串口 1 设置需要得到 115200 的波特率,fck = 72MHz,那么可得: 115200 = 72000000 /(16 ∗ USARTDIV )得到 USARTDIV = 39.0625,分离 USARTDIV 的整数部分与小数部分,整数部分为 39,即 0x27,那么 DIV_Mantissa = 0x27;小数部分为 0.0625,转化为十六进制即 0.0625*16 = 1,所以 DIV_Fractionp = 0x1,USART_BRR 寄存器应该赋值为 0x271,成功设置波特率为 115200。
9.HAL外设初始化MSP回调机制:
HAL_PPP_Init()---->HAL_PPP_MspInit()
HAL_PPP_MspInit()作用:配置PPP用到的硬件,如:GPIO,NVIC,USART
10.HAL库中断回调机制:
中断服务函数-->HAL_PPP_IRQHandler()--->HAL_PPP_xxxCallback()
HAL_PPP_xxxCallback()作用:根据回调函数类型,编写对应的中断处理程序,用户可选择是否使用并重写
11.USART异步通信配置步骤(重点):
1,配置串口工作参数 HAL_UART_Init()
2,串口底层初始化 HAL_UART_MspInit() 配置GPIO,NVIC,CLOCK
3,开启串口异步接受中断 HAL_UART_Receive_IT()
4,设置优先级使能中断 HAL_NVIC_SetPrionty() HAL_NVIC_EnableIRQ()
5,编写中断服务函数 USARTx_IRQHandler()
6.串口数据发送 USART_DR HAL_UART_Transmit()















 1万+
1万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









