







本内容基于江协科技STM32视频内容,整理而得。
文章目录
1. 旋转编码器和对射式红外传感器
1.1 旋转编码器
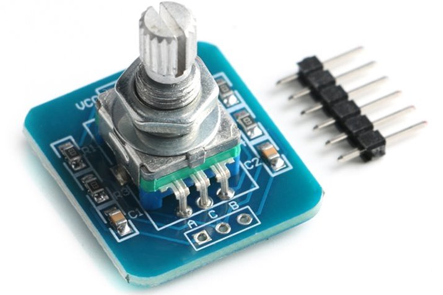
1.1.1 旋转编码器简介
- 旋转编码器:用来测量位置、速度或旋转方向的装置,
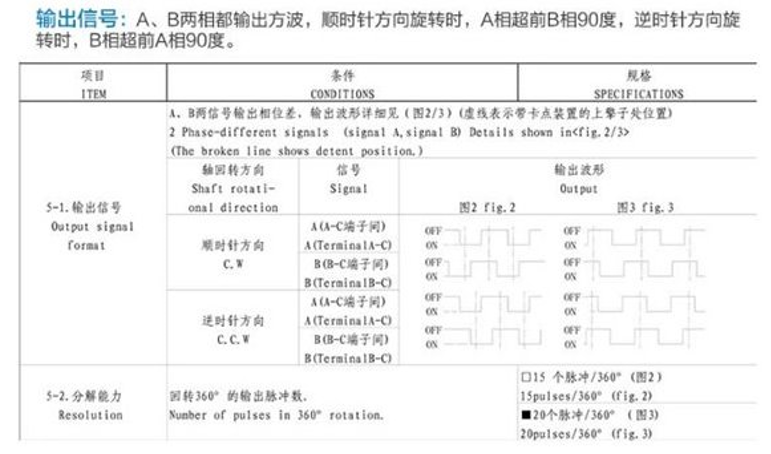
- 当其旋转轴旋转时,其输出端可以输出与旋转速度和方向对应的方波信号,读取方波信号的频率和相位信息即可得知旋转轴的速度和方向
- 类型:机械触点式/霍尔传感器式/光栅式

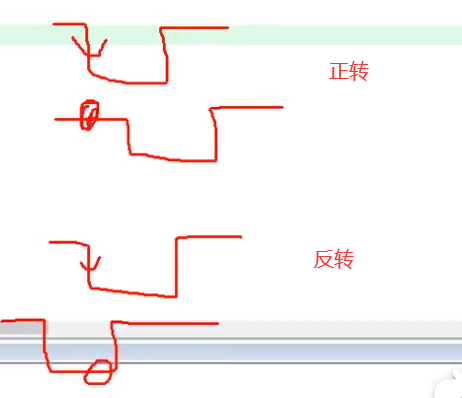
旋转编码器能让两侧触点的通断产生一个90度的相位差。这种相差90度的波形,就叫正交波形,带正交波形信号输出的编码器,是可以用来测方向的。
直接附在电机后面的编码器是霍尔传感器形式编码器,中间是一个圆形磁铁,边上有两个位置错开的霍尔传感器。当磁铁旋转时,通过霍尔传感器就可以输出正交的方波信号。
1.1.2 旋转编码器硬件电路
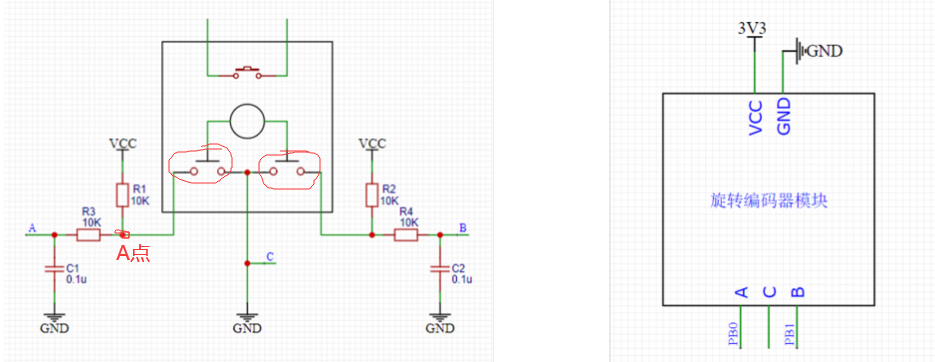
- 当旋转轴旋转时,下面的两个按键型的触点以相位相差90度的方式交替导通,因为这只是个开关信号,所以要配合外围电路才能输出高低电平。
- 左边接了一个10K的上拉电阻,默认没旋转的情况下,这个点被上拉为高电平,通过R3这个电阻输出到A端口的也就是高电平;当旋转时,内部的触点导通,则这个点就直接拉低到GND了,再通过R3输出,A端口就是低电平了,R3是一个输出限流电阻,是为了防止模块引脚电流过大的,C1是输出滤波电容,可以防止一些输出信号抖动。
1.2 对射式红外传感器
使用ITR9606高灵敏度槽型光耦器件,它由一个红外发光二极管和一个NPN光电三极管组成,槽宽度为5mm。传感器特设M3固定安装孔,调节方向与固定方便易用,使用宽电压LM393比较器,信号干净,波形好,驱动能力强,超过15mA。广泛用于电机转速检测,脉冲计数,位置限位等。


- 接好VCC和GND,模块电源指示灯会亮,模块槽中无遮挡时,接收管导通,模块DO输出低电平,开关指示灯亮﹔遮挡时,DO输出高电平,开关指示灯灭。
- 模块DO可与继电器相连,组成限位开关等功能,也可以与有源蜂鸣器模块相连,组成报警器。
- DO输出接口可以与单片机IO口直接相连,一般接外部中断,检测传感器是否有遮档,如用电机码盘则可检测电机的转速。
- 与STM32相连时,引脚DO配置为上拉输入模式。
2. 库函数及代码
2.1 EXTI库函数和NVIC库函数
/*GPIO.h*/
// 用来进行引脚重映射的,第一个参数可以选择要重映射的方式,第二个参数是新的状态,
void GPIO_PinRemapConfig(uint32_t GPIO_Remap, FunctionalState NewState);
// 可以配置AFIO的数据选择器,来选择想要的中断引脚。
void GPIO_EXTILineConfig(uint8_t GPIO_PortSource, uint8_t GPIO_PinSource);
/*exti.h*/
// 把EXTI的配置都清除,恢复成上电默认的状态,
void EXTI_DeInit(void);
// 根据结构体EXTI_InitStruct里的参数配置EXTI外设
void EXTI_Init(EXTI_InitTypeDef* EXTI_InitStruct);
// 可以把参数传递的结构体变量赋一个默认值
void EXTI_StructInit(EXTI_InitTypeDef* EXTI_InitStruct);
// 软件触发外部中断,调用这个函数,参数给一个指定的中断线,
// 就能软件触发一次这个外部中断
void EXTI_GenerateSWInterrupt(uint32_t EXTI_Line);
// 可以获取指定的标志位是否被置1了,
FlagStatus EXTI_GetFlagStatus(uint32_t EXTI_Line);
// 对置1的标志位进行清除
void EXTI_ClearFlag(uint32_t EXTI_Line);
// 获取中断标志位是否被置1了,
ITStatus EXTI_GetITStatus(uint32_t EXTI_Line);
// 清除中断挂起标志位,
void EXTI_ClearITPendingBit(uint32_t EXTI_Line);
/*misc.h*/
// 用来中断分组的,参数是中断分组的方式,
void NVIC_PriorityGroupConfig(uint32_t NVIC_PriorityGroup);
// 根据结构体里面指定的参数初始化NVIC
void NVIC_Init(NVIC_InitTypeDef* NVIC_InitStruct);
// 设置中断向量表
void NVIC_SetVectorTable(uint32_t NVIC_VectTab, uint32_t Offset);
// 系统低功耗配置
void NVIC_SystemLPConfig(uint8_t LowPowerMode, FunctionalState NewState);
// 滴答定时器
void SysTick_CLKSourceConfig(uint32_t SysTick_CLKSource);
2.2 5-1对射式红外传感器计次
2.2.1 硬件电路
对射式红外传感器有遮挡时ÿ
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 838
838

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









