






扩散模型Diffusion model | DDPM
论文原文:Denoising Diffusion Probabilistic Model
前言—和VAE的联系
DDPM实际上是VAE而不是扩散模型
多步扩散
DDPM将VAE的编码过程和生成过程分解为T步,每一个 p ( x t ∣ x t − 1 ) p(x_{t}|x_{t−1}) p(xt∣xt−1)和 q ( x t − 1 ∣ x t ) q(x_{t−1}|x_{t}) q(xt−1∣xt)仅负责建模一个微小变化,它们依然建模为正态分布。
对于微小变化来说,可以用正态分布足够近似地建模(高斯混合模型的思想),类似于曲线在小范围内可以用直线近似,多步分解就有点像用分段线性函数拟合复杂曲线,因此理论上可以突破传统单步VAE的拟合能力限制。
编码能力
DDPM是放弃了模型的编码能力,最终只得到一个纯粹的生成模型
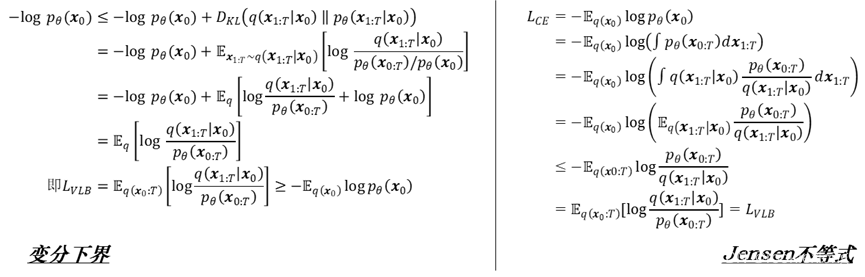
核心推导步骤
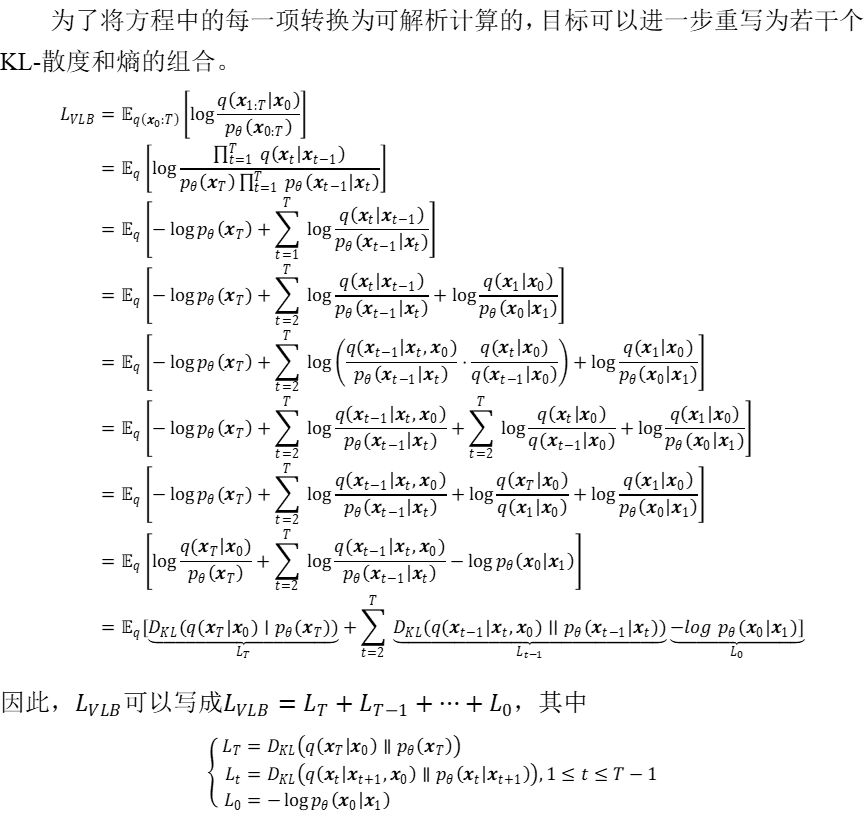
引入了一个 q ( x t − 1 ∣ x t , x 0 ) q(x_{t−1}|x_{t},x_{0}) q(xt−1∣xt,x0)来进行裂项相消,然后转化为正态分布的KL散度形式。
而后用 p θ ( x t − 1 ∣ x t ) p_{\theta}(x_{t−1}|x_{t}) pθ(xt−1∣xt)来近似 q ( x t − 1 ∣ x t , x 0 ) q(x_{t−1}|x_{t},x_{0}) q(xt−1∣xt,x0)从而极大似然 p θ ( x 0 ) p_{\theta}(x_{0}) pθ(x0)
模型推导
前向过程
给定一个从真实数据分布
x
0
∼
q
(
x
)
x_{0}\sim q(x)
x0∼q(x)中采样的数据点,前向扩散过程中分
T
T
T步向样本中加入少量高斯噪声,产生一系列带噪声的样本
x
0
,
.
.
.
,
x
T
x_{0},...,x_{T}
x0,...,xT。加入噪声的均值和方差由控制。即
x
t
=
α
t
x
t
−
1
+
β
t
ε
t
,
ε
t
∼
N
(
0
,
I
)
\boldsymbol{x}_t=\alpha_t\boldsymbol{x}_{t-1}+\beta_t\boldsymbol{\varepsilon}_t,\quad\boldsymbol{\varepsilon}_t\sim\mathcal{N}(\boldsymbol{0},\boldsymbol{I})
xt=αtxt−1+βtεt,εt∼N(0,I)
其中有
α
t
,
β
t
>
0
\alpha_t,\beta_t>0
αt,βt>0且
α
t
2
+
β
t
2
=
1
\alpha_t^2+\beta_t^2=1
αt2+βt2=1(方便下述正态分布相加计算),
β
t
\beta_t
βt通常很接近于0.
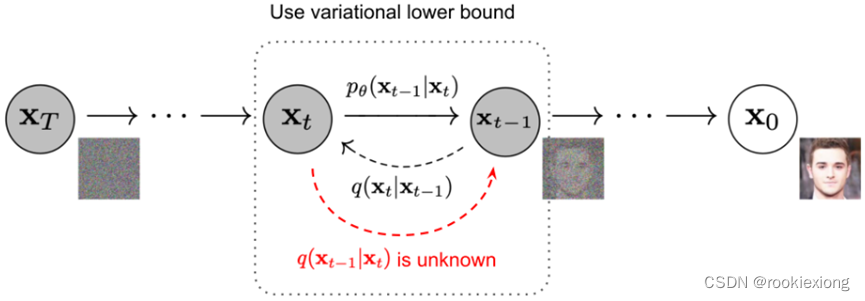
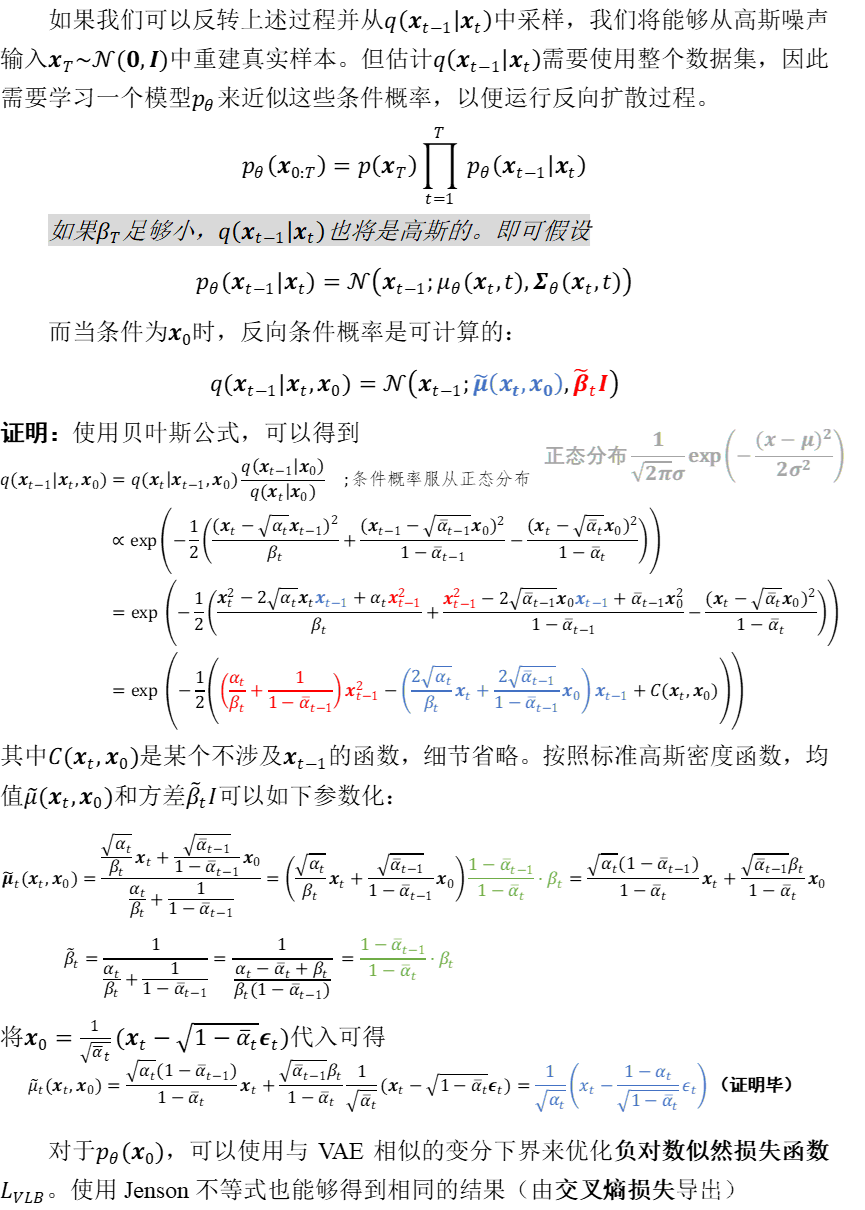
反向过程
如果我们可以反转上述过程并从
q
(
x
t
−
1
│
x
t
)
q(x_{t-1}│x_{t} )
q(xt−1│xt)中采样,我们将能够从高斯噪声输入
x
T
∼
N
(
0
,
I
)
\boldsymbol{x}_T\sim\mathcal{N}(\boldsymbol{0},\boldsymbol{I})
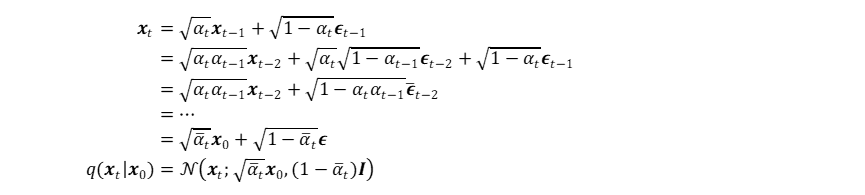
xT∼N(0,I)中重建真实样本。由
x
t
=
α
t
x
t
−
1
+
β
t
ε
t
\boldsymbol{x}_t=\alpha_t\boldsymbol{x}_{t-1}+\beta_t\boldsymbol{\varepsilon}_t
xt=αtxt−1+βtεt可知,
x
t
−
1
=
1
α
t
(
x
t
−
β
t
ε
t
)
\boldsymbol{x}_{t-1}=\frac1{\alpha_t}(\boldsymbol{x}_t-\beta_t\boldsymbol{\varepsilon}_t)
xt−1=αt1(xt−βtεt),由于此过程难以直接计算,可以用神经网络模拟为
μ
(
x
t
)
=
1
α
t
(
x
t
−
β
t
ϵ
θ
(
x
t
,
t
)
)
\boldsymbol{\mu}(\boldsymbol{x}_t)=\frac1{\alpha_t}(\boldsymbol{x}_t-\beta_t\boldsymbol{\epsilon}_\theta(\boldsymbol{x}_t,t))
μ(xt)=αt1(xt−βtϵθ(xt,t))
那么我们的损失函数可以理解为(考虑了扩散过程中的时间因素):
∥
x
t
−
1
−
μ
(
x
t
)
∥
2
=
β
t
2
α
t
2
∥
ε
t
−
ϵ
θ
(
x
t
,
t
)
∥
2
\left\|\boldsymbol{x}_{t-1}-\boldsymbol{\mu}(\boldsymbol{x}_t)\right\|^2=\frac{\beta_t^2}{\alpha_t^2}\left\|\boldsymbol{\varepsilon}_t-\boldsymbol{\epsilon}_\theta(\boldsymbol{x}_t,t)\right\|^2
∥xt−1−μ(xt)∥2=αt2βt2∥εt−ϵθ(xt,t)∥2
忽略前面系数,带入之前的
x
t
{x}_{t}
xt,得到
∥
ε
t
−
ϵ
θ
(
α
ˉ
t
x
0
+
α
t
β
ˉ
t
−
1
ε
ˉ
t
−
1
+
β
t
ε
t
,
t
)
∥
2
\left\|\varepsilon_t-\epsilon_\theta(\bar{\alpha}_t\boldsymbol{x}_0+\alpha_t\bar{\beta}_{t-1}\bar{\boldsymbol{\varepsilon}}_{t-1}+\beta_t\boldsymbol{\varepsilon}_t,t)\right\|^2
εt−ϵθ(αˉtx0+αtβˉt−1εˉt−1+βtεt,t)
2
这里选择回退一步到 x t − 1 x_{t-1} xt−1来给出 x t x_{t} xt,因为我们已经事先采样了 ε t \varepsilon_t εt,而 ε t \varepsilon_t εt跟 ε ˉ t \bar{\varepsilon}_{t} εˉt不是相互独立的,所以给定 ε t \varepsilon_t εt的情况下,我们不能完全独立地采样 ε ˉ t \bar{\varepsilon}_{t} εˉt
损失
上述损失函数实际上包含了4个需要采样的随机变量,要采样的随机变量越多,就越难对损失函数做准确的估计。可以通过一个积分技巧来将
ε
t
\varepsilon_t
εt跟
ε
ˉ
t
−
1
\bar{\varepsilon}_{t-1}
εˉt−1合并成单个正态随机变量
大致就是去构造两个独立的方程式去解方程:
α
t
β
ˉ
t
−
1
ε
ˉ
t
−
1
+
β
t
ε
t
=
β
t
ε
∣
ε
∼
N
(
0
,
I
)
,
β
t
ε
ˉ
t
−
1
−
α
t
β
ˉ
t
−
1
ε
t
=
β
ˉ
t
ω
∣
ω
∼
N
(
0
,
I
)
\alpha_t\bar{\beta}_{t-1}\boldsymbol{\bar{\varepsilon}}_{t-1}+\beta_t\boldsymbol{\varepsilon}_t ={{\beta}}_{t}\boldsymbol{\varepsilon}|\boldsymbol{\varepsilon}\sim\mathcal{N}(\mathbf{0},\boldsymbol{I}),\beta_t\bar{\boldsymbol{\varepsilon}}_{t-1}-\alpha_t\bar{\boldsymbol{\beta}}_{t-1}\boldsymbol{\varepsilon}_t = \bar{\beta}_t\boldsymbol{\omega}|\boldsymbol{\omega}\sim\mathcal{N}(\mathbf{0},\boldsymbol{I})
αtβˉt−1εˉt−1+βtεt=βtε∣ε∼N(0,I),βtεˉt−1−αtβˉt−1εt=βˉtω∣ω∼N(0,I)
解出来代回去即可得到DDPM最终用的损失函数:
∥
ε
−
β
ˉ
t
β
t
ϵ
θ
(
α
ˉ
t
x
0
+
β
ˉ
t
ε
,
t
)
∥
2
\left\|\varepsilon-\frac{\bar{\beta}_t}{\beta_t}\epsilon_\theta(\bar{\alpha}_t\boldsymbol{x}_0+\bar{\beta}_t\boldsymbol{\varepsilon},t)\right\|^2
ε−βtβˉtϵθ(αˉtx0+βˉtε,t)
2
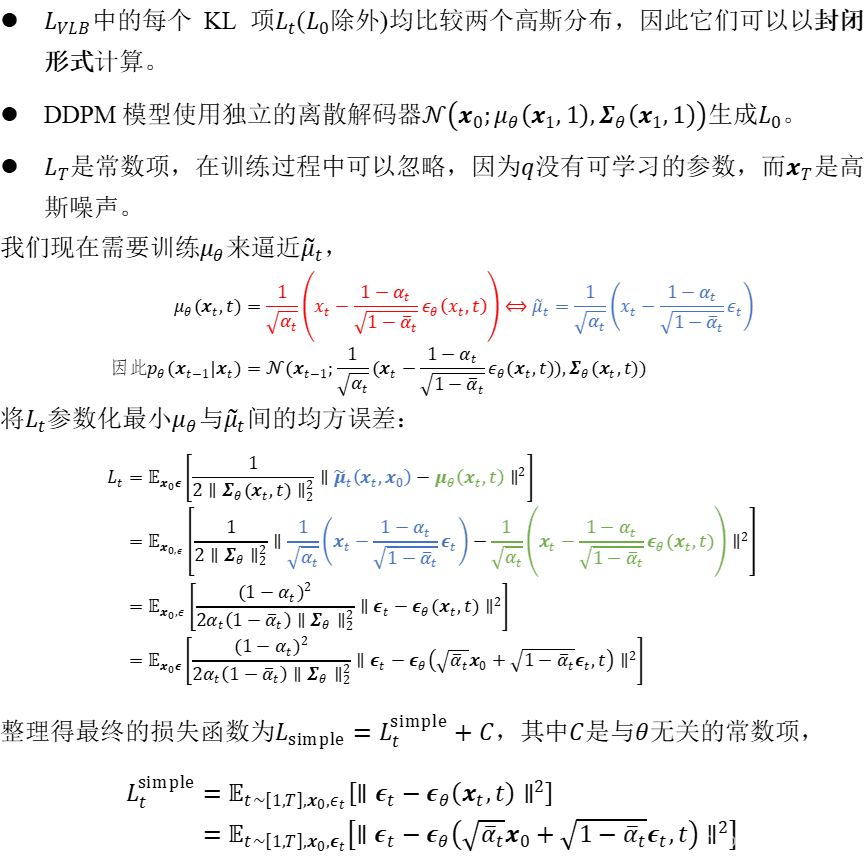
变分下界
推理生成
训练完之后,我们就可以从一个随机噪声
x
T
∼
N
(
0
,
I
)
\boldsymbol{x}_T\sim\mathcal{N}(\boldsymbol{0},\boldsymbol{I})
xT∼N(0,I)出发反向传播
T
T
T步来进行生成。同时需要进行随机采样,那么需要补上噪声项。
x
t
−
1
=
1
α
t
(
x
t
−
β
t
ϵ
θ
(
x
t
,
t
)
)
+
σ
t
z
,
z
∼
N
(
0
,
I
)
\boldsymbol{x}_{t-1}=\frac1{\alpha_t}(\boldsymbol{x}_t-\beta_t\boldsymbol{\epsilon}_\theta(\boldsymbol{x}_t,t))+\sigma_t\boldsymbol{z},\quad\boldsymbol{z}\sim\mathcal{N}(\mathbf{0},\boldsymbol{I})
xt−1=αt1(xt−βtϵθ(xt,t))+σtz,z∼N(0,I)
实质上,DDPM的采样每次都从一个随机噪声出发,需要重复迭代T步来得到一个样本输出














 153
153











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









