






目录
惯性导航
惯性导航惯性导航系统(Inertial Navigation System,INS)是一种不依赖外部参考信息的自主导航系统。它通过测量载体在运动过程中的加速度和角速度,结合初始位置和速度,来计算出载体的实时位置、速度和姿态。其核心是加速度计与陀螺仪两种惯性测量单元,通过积分加速度数据,可以得到速度信息;在对速度信息进行积分得到位置信息。陀螺仪测量的角速度数据用于确定载体的航向和姿态。惯性导航的主要优点在于自主性(不依赖外界信号)、隐蔽性(不发射或接受信号)、连续性(能够提供连续的位置和速度信息,不易受环境影响)。但是,缺点就是由于长时间积分会导致误差会随着时间积累,则精度就会降低。当然至于现在依然需要惯性导航,我想是因为惯性导航能够与其他导航如GPS进行组合导航,弥补其长时间导航效果差的不足吧。
基本了解了惯性导航的概念,接下来就是认识一下上述的惯性测量单元:加速度计与陀螺仪。了解它们的原理后,我们才能够知道它们在惯性导航系统中扮演着什么样的角色。
一、加速度计
加速度计是一种测量物体加速度的传感器,下面分析机械式加速度计的原理。
1.机械式加速度计原理
如下图所示,简单的加速度计结构图。
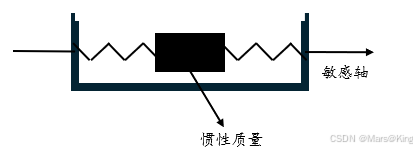
当载体带动装置水平向右加速运动时,我们可以看到如下情景:
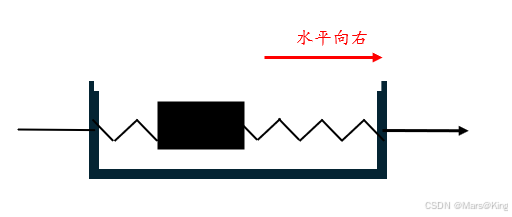
质量块向左被压缩,此时进行力学分析:
已知牛顿第二定律(惯性导航遵循牛顿第二定律):,合外力作用在质量为m的物体上,加速度为a,满足上述公式。
此时不妨假设弹簧上的弹力为,
为质量块收到的万有引力加速度,因此有公式:
令比力,故有
。可以设想一下,假如载体是沿着重力加速度的反方向加速运动,那么此刻
为我们平常熟知的重力加速度
,假设此时加速度
,那么比力
,试想如果载体是匀速上升,那么此时比力
,如此一来数值一一对应,就可以根据比力来分析得到载体的加速度。
二、陀螺仪
针对陀螺仪来说,花起图来麻烦,分析起来也模糊不清,暂且就认为可以得到角速度或者角增量的数值吧。
总结
以上主要是详细说明了加速度计的原理,简单提过陀螺仪的原理,毕竟暂时不需要分析陀螺仪的具体原理也能够完成任务,同时在了解整个思路后在去了解陀螺仪原理或许会更好。


















 395
395

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











