






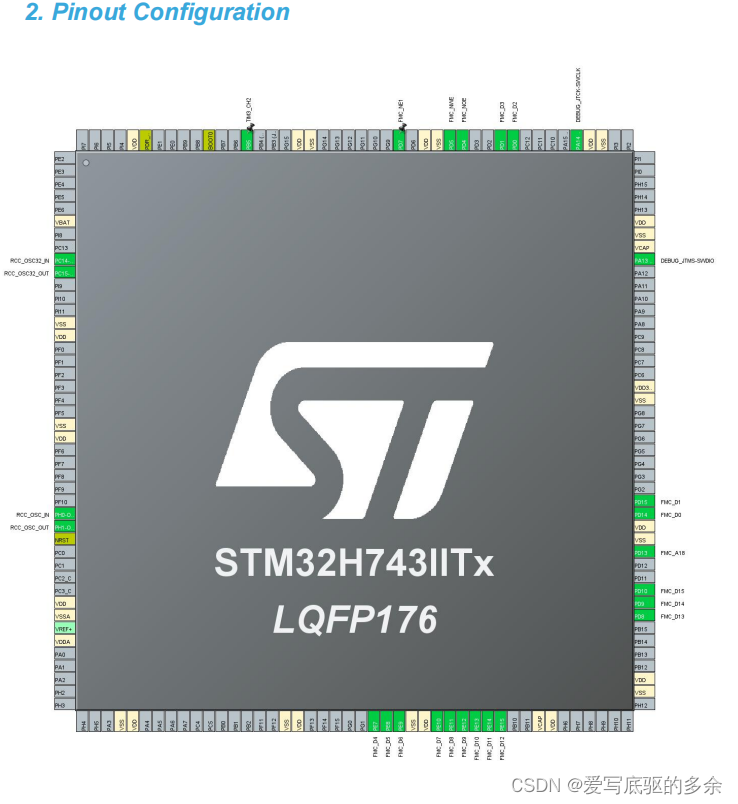
STM32 H743 HAL库 NT35510 正点原子阿波罗V2
正点原子阿波罗V2 开发板 NT35510 驱动编写
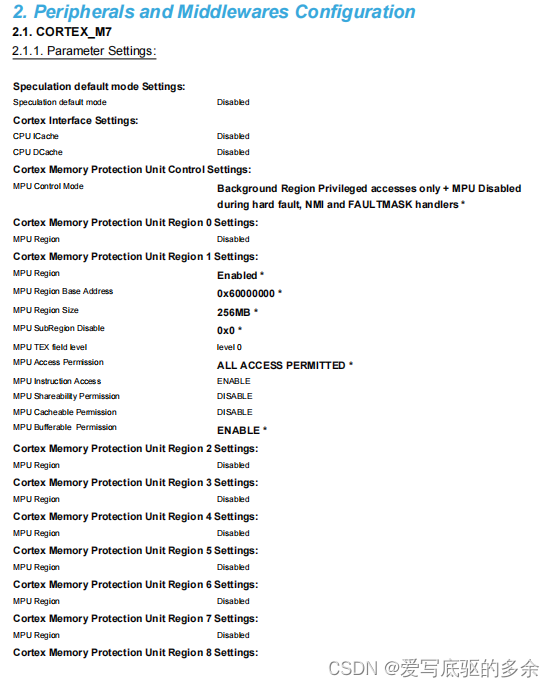
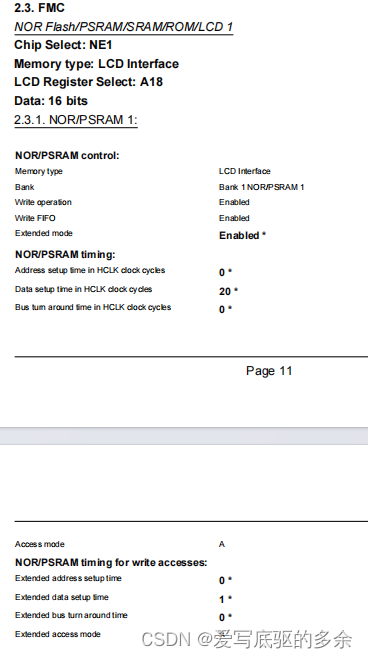
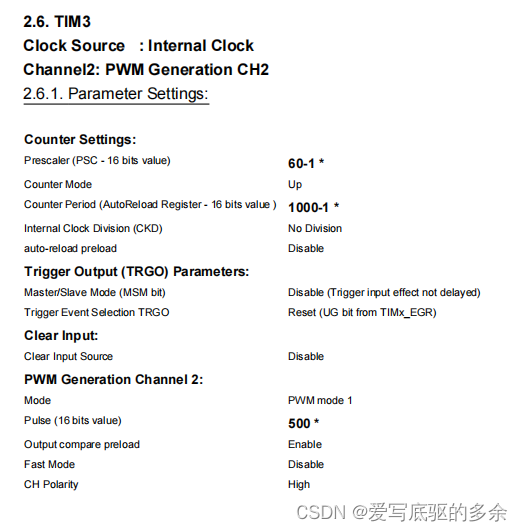
HAL配置

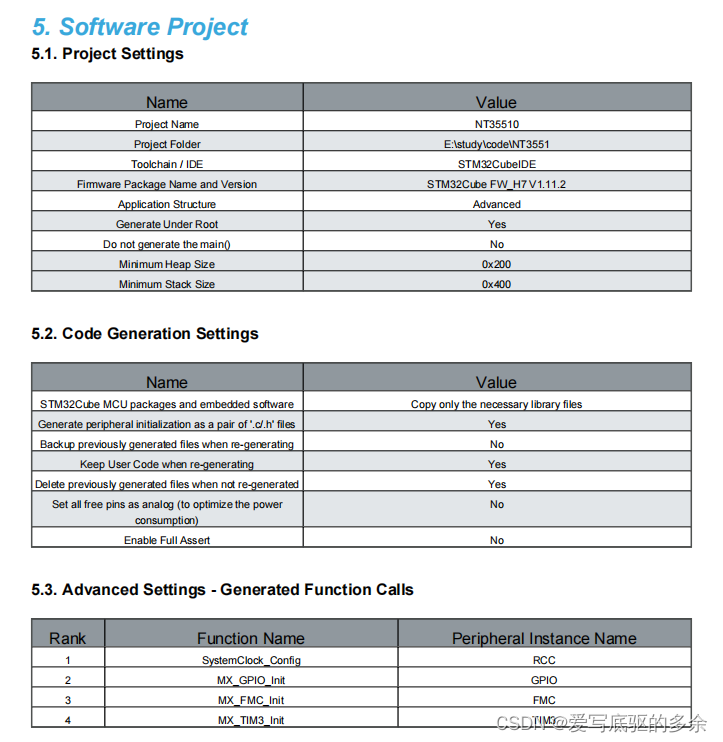
代码
#ifndef ICODE_LCD_NT35510_H_
#define ICODE_LCD_NT35510_H_
#include "main.h"
#include "tim.h"
#include "fmc.h"
#define YU_RGB888TO565(R,G,B) (((R>>3)<<11)|((G>>2)<<5)|(B>>3))
#define YU_NT35510ID 0X5510
#define YU_LCD_WIDTH 480
#define YU_LCD_HEIGHT 800
#define YU_LCD_COMMADDRESS 0x60000000
#define YU_LCD_DATAADDRESS 0x60080000
#define YU_LCD_WRITE(ADDRESS,DATA) do{(*(uint16_t*)ADDRESS) = DATA;}while(0)
#define YU_LCD_READ(ADDRESS,DATA) do{DATA = (*(uint16_t*)ADDRESS);}while(0)
#define YU_LCD_WRITE_REG_DATA(REGS,DATA) do{YU_LCD_WRITE(YU_LCD_COMMADDRESS,REGS);YU_LCD_WRITE(YU_LCD_DATAADDRESS,DATA);}while(0)
#define YU_LCD_READ_REG_DATA(REGS,DATA) do{YU_LCD_WRITE(YU_LCD_COMMADDRESS,REGS);YU_LCD_READ(YU_LCD_DATAADDRESS,DATA);}while(0)
typedef enum{
YU_ERROR = 0,
YU_OK = 1,
}YU_LCD_STATE;
typedef enum{
YU_AND = 0,
YU_OR = 1,
YU_NOT = 2,
YU_WRITE =3
}YU_LCD_MODE;
typedef struct{
uint16_t id[3];
union{
struct{
uint8_t RSMY:1;
uint8_t RSMX:1;
uint8_t MH:1;
uint8_t RGB:1;
uint8_t ML:1;
uint8_t MV:1;
uint8_t MX:1;
uint8_t MY:1;
};
uint16_t MADCTL;
};
uint16_t wide;
uint16_t high;
}_YU_LCD_DRIVE_;
YU_LCD_STATE yulcdinit(_YU_LCD_DRIVE_ *init);
void yulcdsetdir(_YU_LCD_DRIVE_ *drive);
YU_LCD_STATE yulcdlum(uint16_t lum);
void yulcdsetcursor(uint16_t x,uint16_t y);
void yulcdsetwin(uint16_t x,uint16_t y,uint16_t w,uint16_t h);
void yusetdot(uint16_t x,uint16_t y,uint16_t color,YU_LCD_MODE mode);
void yulcdtask(_YU_LCD_DRIVE_ *init);
#endif
#include "../LCD/nt35510.h"
static void yulcdunlock(uint8_t page){
YU_LCD_WRITE_REG_DATA(0xF000,0x0055);
YU_LCD_WRITE_REG_DATA(0xF001,0x00AA);
YU_LCD_WRITE_REG_DATA(0xF002,0x0052);
YU_LCD_WRITE_REG_DATA(0xF003,0x0008);
YU_LCD_WRITE_REG_DATA(0xF004,((page)?0x0001:0x0000));
}
void yulcdsetcursor(uint16_t x,uint16_t y){
YU_LCD_WRITE_REG_DATA(0x2A00,x>>8);
YU_LCD_WRITE_REG_DATA(0x2A01,x&0xFF);
YU_LCD_WRITE_REG_DATA(0x2B00,y>>8);
YU_LCD_WRITE_REG_DATA(0x2B01,y&0xFF);
}
void yulcdsetwin(uint16_t x,uint16_t y,uint16_t w,uint16_t h){
w = ((w+x)-1);
h = ((h+y)-1);
YU_LCD_WRITE_REG_DATA(0x2A00,x>>8);
YU_LCD_WRITE_REG_DATA(0x2A01,x&0xFF);
YU_LCD_WRITE_REG_DATA(0x2A02,w>>8);
YU_LCD_WRITE_REG_DATA(0x2A03,w&0xFF);
YU_LCD_WRITE_REG_DATA(0x2B00,y>>8);
YU_LCD_WRITE_REG_DATA(0x2B01,y&0xFF);
YU_LCD_WRITE_REG_DATA(0x2B02,h>>8);
YU_LCD_WRITE_REG_DATA(0x2B03,h&0xFF);
}
void yulcdsetdir(_YU_LCD_DRIVE_ *drive){
yulcdsetwin(0,0,drive->wide,drive->high);
YU_LCD_WRITE_REG_DATA(0x3600,drive->MADCTL);
}
YU_LCD_STATE yulcdlum(uint16_t lum){
if(lum > 1000)return YU_ERROR;
__HAL_TIM_SET_COMPARE(&htim3,TIM_CHANNEL_2,lum);
return YU_OK;
}
YU_LCD_STATE yulcdinit(_YU_LCD_DRIVE_ *init){
if(init == NULL)return YU_ERROR;
yulcdunlock(1);
YU_LCD_READ_REG_DATA(0XC500,init->id[1]);
YU_LCD_READ_REG_DATA(0XC501,init->id[2]);
init->id[0] = (init->id[1]<<8)|init->id[2];
if(init->id[0] != YU_NT35510ID)return YU_ERROR;
HAL_Delay(5);
if(init->MV){
init->wide = YU_LCD_HEIGHT;
init->high = YU_LCD_WIDTH;
}
else{
init->wide = YU_LCD_WIDTH;
init->high = YU_LCD_HEIGHT;
}
yulcdunlock(0);
yulcdsetdir(init);
YU_LCD_WRITE(YU_LCD_COMMADDRESS,0x2800);
YU_LCD_WRITE_REG_DATA(0x3A00,0x0055);
YU_LCD_WRITE(YU_LCD_COMMADDRESS,0x1100);
YU_LCD_WRITE(YU_LCD_COMMADDRESS,0x2900);
HAL_TIM_Base_Start(&htim3);
HAL_TIM_PWM_Start(&htim3, TIM_CHANNEL_2);
yulcdlum(500);
return YU_OK;
}
void yusetdot(uint16_t x,uint16_t y,uint16_t color,YU_LCD_MODE mode){
uint16_t temp[3];
uint16_t tempcolor = 0;
yulcdsetcursor(x,y);
if(mode == YU_WRITE){
tempcolor = color;
}else{
YU_LCD_WRITE(YU_LCD_COMMADDRESS,0x2E00);
YU_LCD_READ(YU_LCD_DATAADDRESS,temp[0]);
YU_LCD_READ(YU_LCD_DATAADDRESS,temp[1]);
YU_LCD_READ(YU_LCD_DATAADDRESS,temp[2]);
tempcolor=YU_RGB888TO565((temp[1]>>8),(temp[1]&0xFF),(temp[2]>>8));
switch(mode){
case YU_AND:tempcolor &= ~color;break;
case YU_OR:tempcolor |= color;break;
case YU_NOT:tempcolor ^= color;break;
case YU_WRITE:break;
default:break;
}
}
YU_LCD_WRITE_REG_DATA(0x2C00,tempcolor);
}
void yulcdfillcolor(uint16_t x,uint16_t y,uint16_t w,uint16_t h,uint16_t color,YU_LCD_MODE mode){
uint16_t xm = x+w;
uint16_t ym = y+h;
if(mode == YU_WRITE){
yulcdsetwin(x,y,w,h);
YU_LCD_WRITE(YU_LCD_COMMADDRESS,0x2C00);
for(uint16_t i = y;i < ym;++i){
for(uint16_t j = x;j < xm;++j){
YU_LCD_WRITE(YU_LCD_DATAADDRESS,color);
}
}
}else{
for(uint16_t i = y;i < ym;++i){
for(uint16_t j = x;j < xm;++j){
yusetdot(j,i,color,mode);
}
}
}
}
void yulcdfilldata(uint16_t x,uint16_t y,uint16_t w,uint16_t h,uint16_t *color,YU_LCD_MODE mode){
uint32_t count = 0;
uint16_t xm = x+w;
uint16_t ym = y+h;
if(mode == YU_WRITE){
yulcdsetwin(x,y,w,h);
YU_LCD_WRITE(YU_LCD_COMMADDRESS,0x2C00);
for(uint16_t i = y;i < ym;++i){
for(uint16_t j = x;j < xm;++j){
YU_LCD_WRITE(YU_LCD_DATAADDRESS,color[count++]);
}
}
}else{
for(uint16_t i = y;i < ym;++i){
for(uint16_t j = x;j < xm;++j){
yusetdot(j,i,color[count++],mode);
}
}
}
}
void yulcdtask(_YU_LCD_DRIVE_ *init){
uint16_t tempcolor[64*64] = {0};
for(uint16_t i=0;i<64*64;++i){
tempcolor[i] = ((((i%8)&0x01) ? 0x0000 : 0x001F) |
(((i%8)&0x02) ? 0x0000 : 0x07E0) |
(((i%8)&0x04) ? 0x0000 : 0xF100));
}
yulcdinit(init);
yulcdfillcolor(0,0,init->wide,init->high,0xFFFF,3);
HAL_Delay(100);
for(uint16_t i=0;i<1000;++i){
yulcdlum(i);
HAL_Delay(1);
}
yulcdfillcolor(16,16,16,16,0xFFFF,2);
yulcdfilldata(100,100,64,64,tempcolor,3);
}
#include "../LCD/nt35510.h"
_YU_LCD_DRIVE_ g_lcd = {.MV = 0};
void appmain(void){
yulcdtask(&g_lcd);
while(1){
}
}
注意:
1.H7MPU需要开启否则无法操作数据
2.RGB转换使用的是舍去地位数据颜色会出现对不上















 2438
2438











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









