







 该专栏为热销专栏榜 第10名
该专栏为热销专栏榜 第10名💡💡💡解决什么问题:许多网络不能很好地去除图像采集或传输过程中产生的真实噪声(即空间变异噪声),这严重阻碍了它们在实际图像去噪任务中的应用。
💡💡💡创新点:提出了一种新的双分支残差注意网络用于图像去噪,它具有广泛的模型架构和注意引导特征学习的优点。该模型包含两个不同的并行分支,可以捕获互补特征,增强模型的学习能力。我们分别设计了一种新的残差注意力(RAB)和一种新的混合型扩张型残差注意力(HDRAB)。
💡💡💡如何跟YOLOv8结合:RAB和HDRAB引入到backbone
💡💡💡本人在低光照、红外小目标数据集涨点惊喜
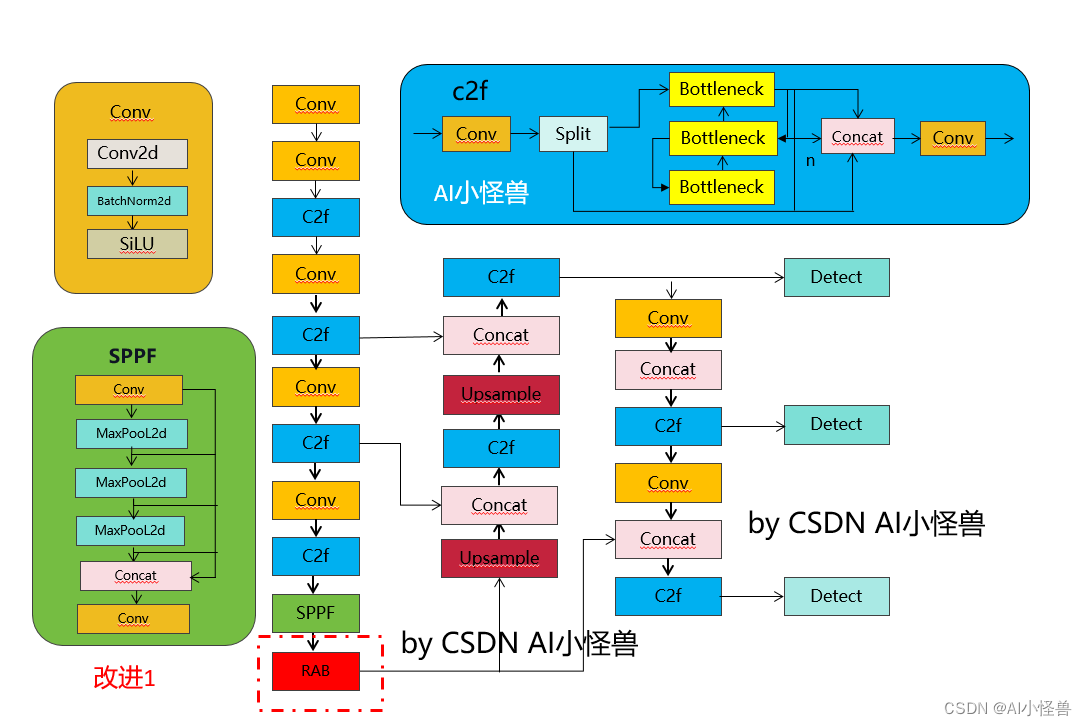
改进1结构图如下:
改进2结构图如下:

 订阅专栏 解锁全文
订阅专栏 解锁全文
















 834
834

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











