






☞以下内容可以让从事同行业的同志们省去很多在网上荡资料的时间,包括编译安装的步骤,一条龙通过
【声明,本人是个小白,希望可以获得同行之间的经验交流,下面是纯命令文本介绍,后期有人咨询的话,考虑优化一下,添加一些步骤图片进去】
【换源文件找一下我上传的文档】
一:装载驱动之前我们需要了解到Linuxcnc2.82/Debian10系统内核版本
~#: uname -a /uname -an可以查看到内核版本
~#:apt-cache search linux-header-4.19.0.18执行下载
~#: sudo apt-get install linux-image-4.19.0.18-rt-amd
~#: sudo apt-get install linux-header-4.19.0.18-rt-amd
在这里更新声明一下,linux-header-4.19.0.17的内核下架了,大家可以下载最新版本的,先下载image,再下载对应的herders.
二:驱动文件:【Etherlabmaster】【Linuxcnc-ethercat】
1.下载这两个驱动文件之前,我们需要下载一下依赖包
sudo apt install mercurial build-essential automake tree dkms bison flex2.接下来我们开始编译安装第一个驱动文件【Etherlabmaster】
~#:sudo git clone https:// github.com/icshwi/etherlabmaster
~#:cd etherlabmaster
~#:make init
~#:echo "ENABLE_CYCLES = NO" > configure/CONFIG_OPTIONS.local
~#:make build
~#:make install
~#:echo "ETHERCAT_MASTER0=eth0" > ethercatmaster.local注意一下:上条命令 eth0 这个参数,需要根据自己系统的实际值去做修改,给大家一个方法:新打开一个终端窗口,输入命令 ip addr 回车执行,找到有MAC/IP 的那一段的开头名称 ,就是对应的这个参数,更换掉就行。
~#: make dkms_add
~#: make dkms_build
~#: make dkms_install
~#: make setup
~#: sudo mkdir -p /usr/include/linuxcnc
~#: sudo ln -s /opt/etherlab/include/*.h /usr/include/linuxcnc/
~#: sudo ln -s /opt/etherlab/lib/lib* /usr/lib/以上命令执行完后,驱动就安装成功啦~
为了驱动正常启动生效
~#:sudo reboot 执行重启一下
开机之后我们来检测一下是否成功安装完成了
~#: ethercat slaves这两个命令在主站与从站正常连接的情况下会有反馈数据显示
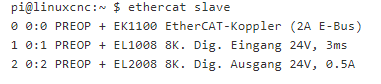
显示以上信息,就OK了
3.接下来我们安装第二个驱动【Linuxcnc-ethercat】
在这里同样的也是需要下载一下依赖包
~#::sudo apt install linuxcnc-uspace-dev依赖包安装完成, 接着执行下面命令
~#: sudo git clone https://github.com/sittner/linuxcnc-ethercat
~#: cd linuxcnc-ethercat
~#: sudo make configure
~#: sudo make注意一下,在这里可能会出现头文件(xxx.h)的报错提示,在这里给大家两个处理办法
第一种:
~#: sudo dpkg-checkbuilddeps第二种:
*****************************用aptitude 工具可以搞定***********************************
~#: sudo apt-get install aptitude
~#: sudo aptitude install python-dev
~#: sudo make
~#: sudo make install















 6669
6669











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









