







学习笔记:深蓝学院曾书格视频笔记
基于对滤波框架下的SLAM算法的了解,首先应当了解最重要的一个滤波框架——贝叶斯滤波(Bayes Filter),而KF、EKF、UKF、PF都是基于贝叶斯框架下的具体实现,因此需要深刻理解贝叶斯估计的基本原理。
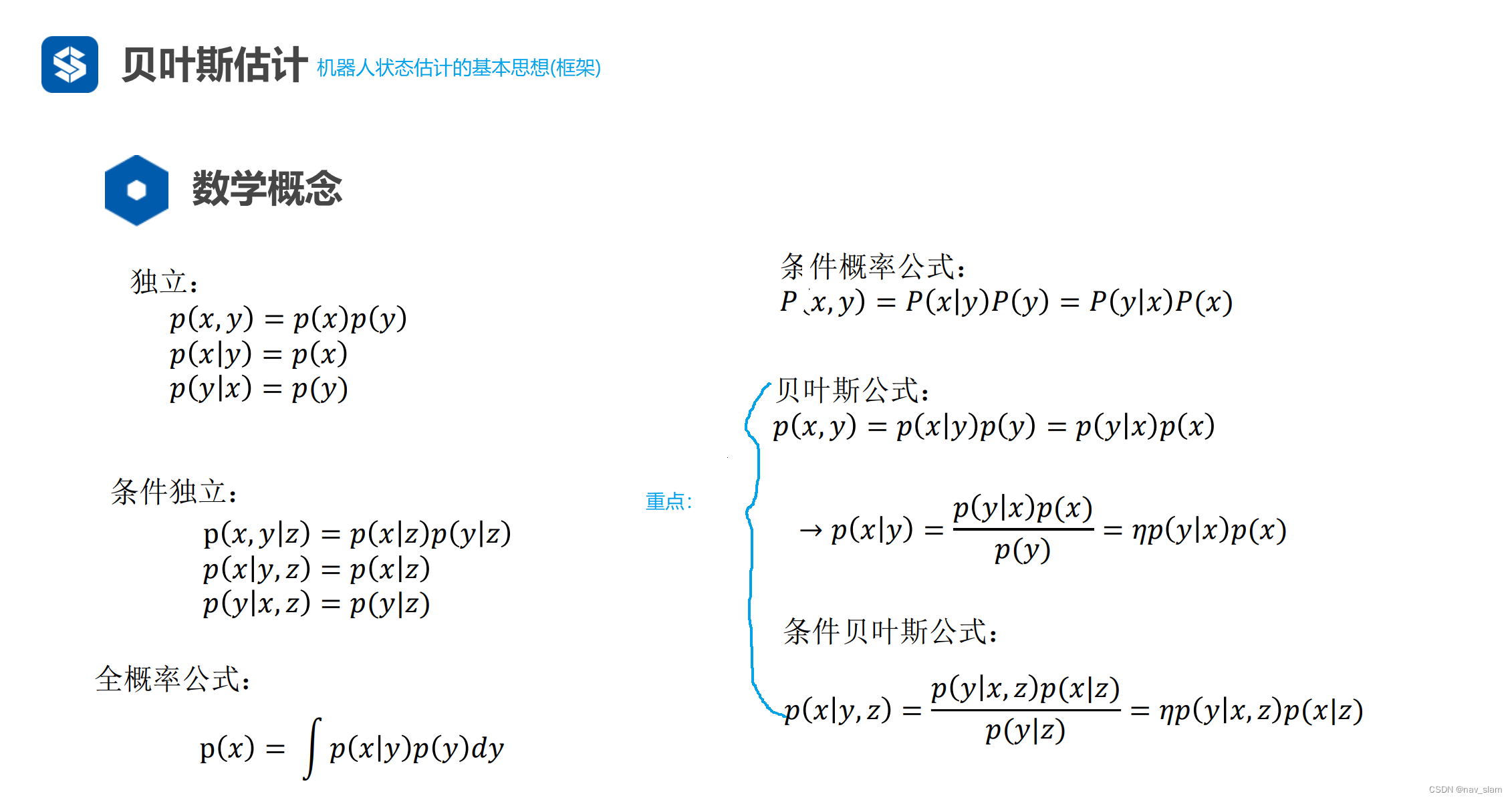
1.概率基础知识:
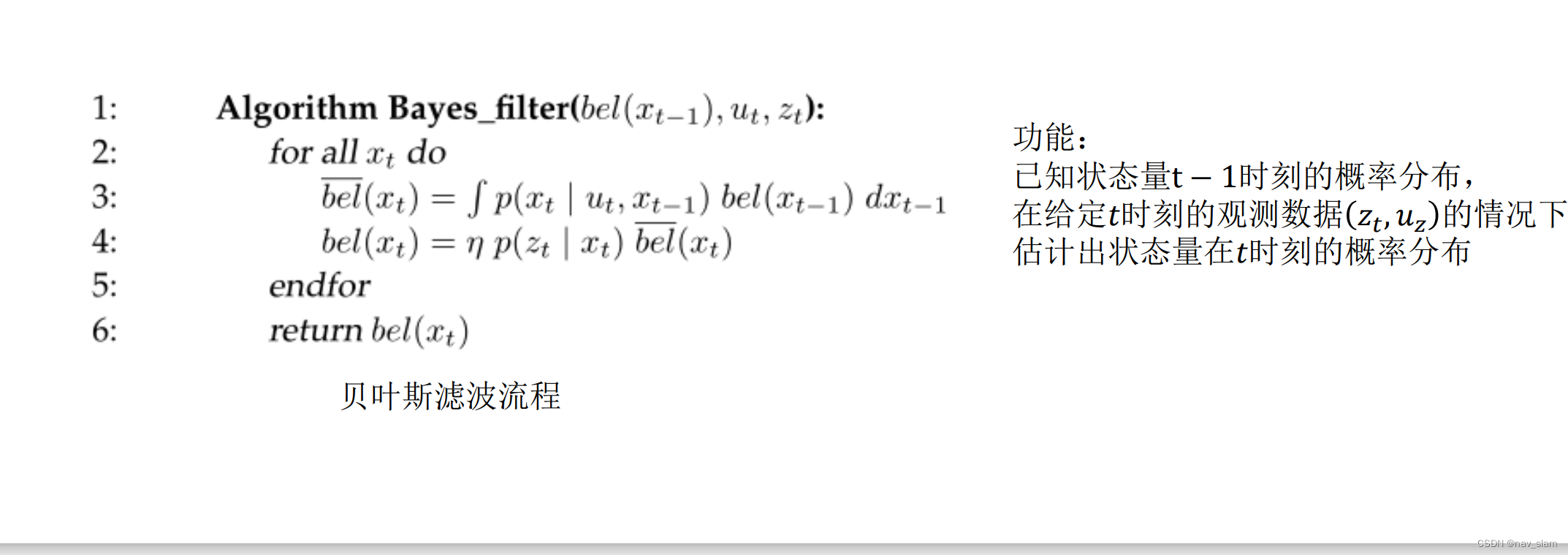
2.贝叶斯滤波伪代码
3. 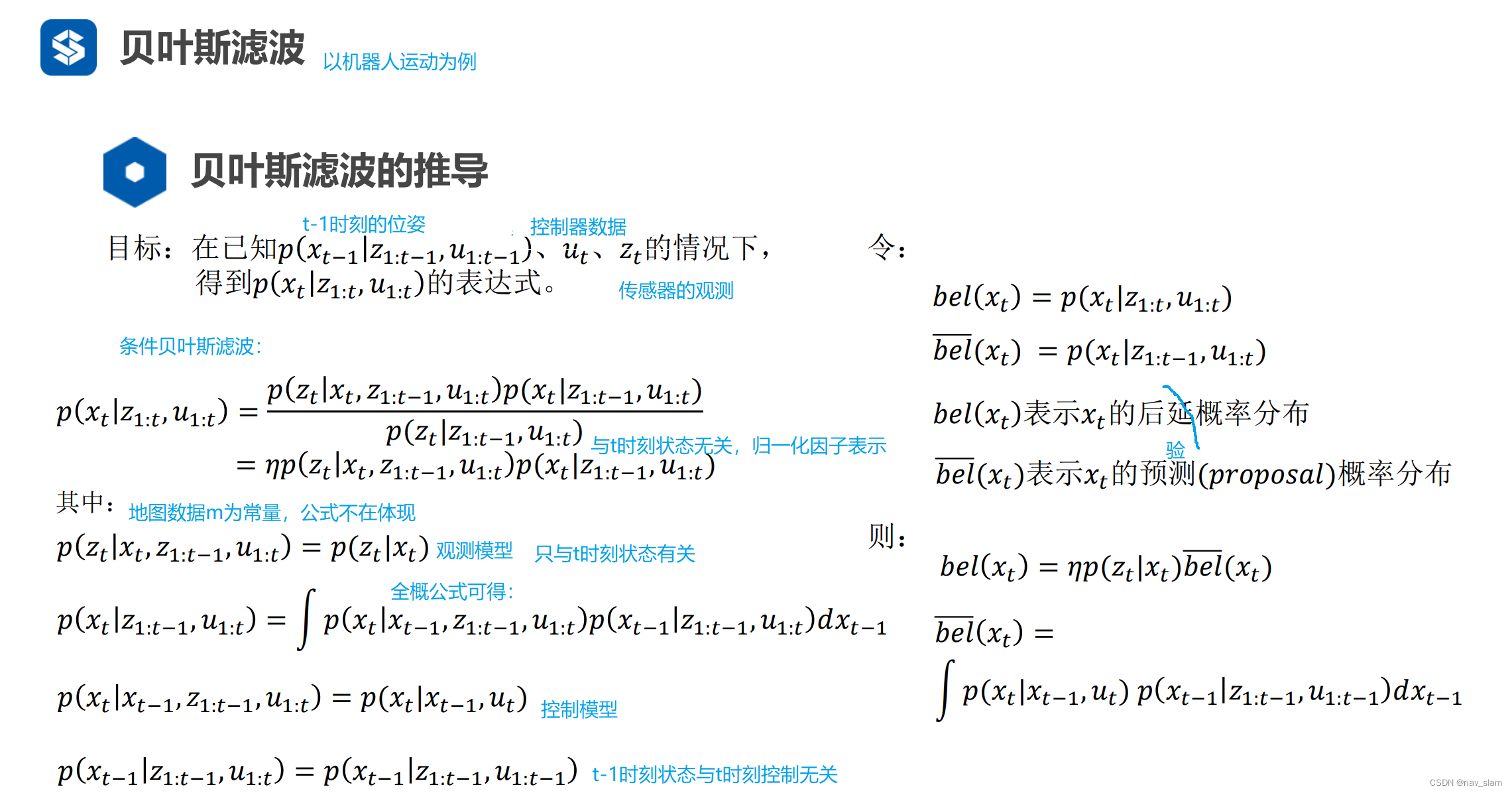
个人认为贝叶斯滤波只是一个状态估计框架,大概知道其原理即可,以及机器人状态估计中所作的两个些假设:观测模型和控制模型的假设。
学习笔记:深蓝学院曾书格视频笔记
基于对滤波框架下的SLAM算法的了解,首先应当了解最重要的一个滤波框架——贝叶斯滤波(Bayes Filter),而KF、EKF、UKF、PF都是基于贝叶斯框架下的具体实现,因此需要深刻理解贝叶斯估计的基本原理。
1.概率基础知识:
2.贝叶斯滤波伪代码
3.
个人认为贝叶斯滤波只是一个状态估计框架,大概知道其原理即可,以及机器人状态估计中所作的两个些假设:观测模型和控制模型的假设。











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言



















 387
387





