







一、驱动设置
DRV8825:
引脚设置:
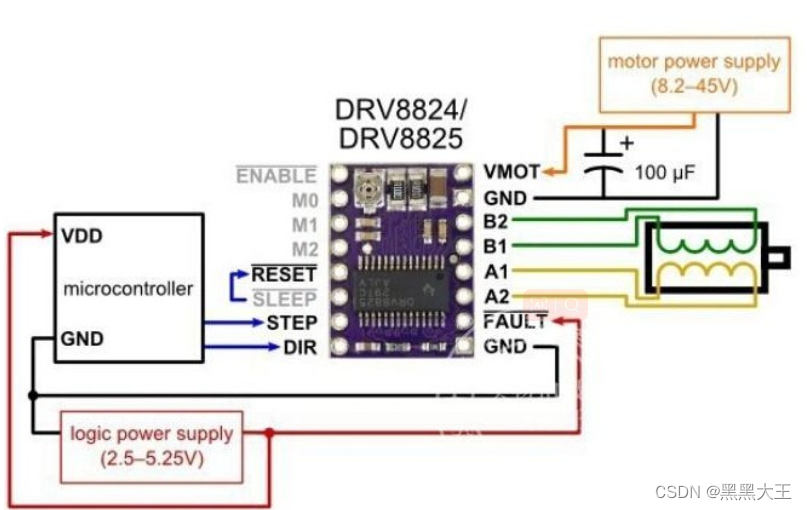
SLEEP高电平为正常能耗模式,而RESET默认为高电平,将它们连接起来就行。EN使能引脚默认为低电平,低电平为工作状态。DIR是方向控制引脚,低电平顺时针,高电平相反。STEP是脉冲输入引脚,pwm从此引脚输入。
FAULT和下面的GND要接单片机(如果是电路设计,记得让它和单片机供地,否则转速和力矩不匹配)。
B2B1A2A1为42步进电机AB相输入(AB相区分方法:方法一:万用表打到测通断挡位,两条相通的就是同相;方法二:万用表打到20欧姆档,哪两根线有显示电阻就为同相,电阻太大的电机有可能是损坏的)。
VMOT和GND的电源输入之间一定要加100uf的电解电容。
调节电流 :通过拧动表面的十字螺丝来调节大小,顺时针增大好像是。
A4988和DRV8825的参数设置是一样的,不过需要注意的的是,A4988的AB相线序和DRV8825不一样。
TB6600驱动器 :

共阳极接法:
(TB6600驱动器的ENA+、DIR+、PUL+与单片机的VCC连接)
DIR-连接单片机控制方向、PUL-连接单片机PWM输出引脚、 ENA-控制使能(可以悬空,就一直转)
共阴极接法:
(TB6600驱动器的ENA-、DIR-、PUL-与单片机的GND连接)
DIR+连接单片机控制方向、PUL+连接单片机PWM输出引脚、 ENA+控制使能
VCC和GND:
连接9-40v直流电源,这个GND要和单片机共地!如果驱动放反了,有可能烧单片机(我的单片机就烧了。。)。
这个驱动器一上电步进电机
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1172
1172

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









