






一、ABB的开发软件
ABB双臂机器人配备了内部的控制器和机器人控制软件,包括RobotWare 和 RobotStudio。这两个软件的区别如下:
Robotware:
用途:Robotware 是 ABB 机器人控制系统的软件,它负责机器人操作和控制。它包含了机器人操作所需的所有基本软件,如运动控制、程序编辑、诊断和调试工具。
特点:它是嵌入在ABB机器人控制器中的核心软件,用于直接与机器人硬件进行交互,执行运动指令、路径规划等功能。Robotware 可以被视为机器人控制器的操作系统
RobotStudio:
用途:RobotStudio 是 ABB 提供的离线编程和仿真软件,用于在电脑上进行机器人的编程和调试,而不需要直接连接到机器人硬件。
特点:它主要用于3D仿真和离线编程,可以在虚拟环境中创建、调试并优化机器人程序。在模拟过程中,用户可以查看机器人动作、碰撞检测、路径优化等。RobotStudio 可以生成可直接运行在机器人控制器上的程序,并减少现场调试时间。
总结:
- Robotware 主要是用于实际机器人控制器上的软件,负责与硬件交互和执行实际任务。
- RobotStudio 是用于编程、仿真和调试的工具,帮助用户在虚拟环境中开发和优化机器人程序。
同时ABB还配备了FlexPendant,可以理解为是一个自带的小电脑,具有友好的人机交互界面,如下图所示:

二、ABB的基本构型参数
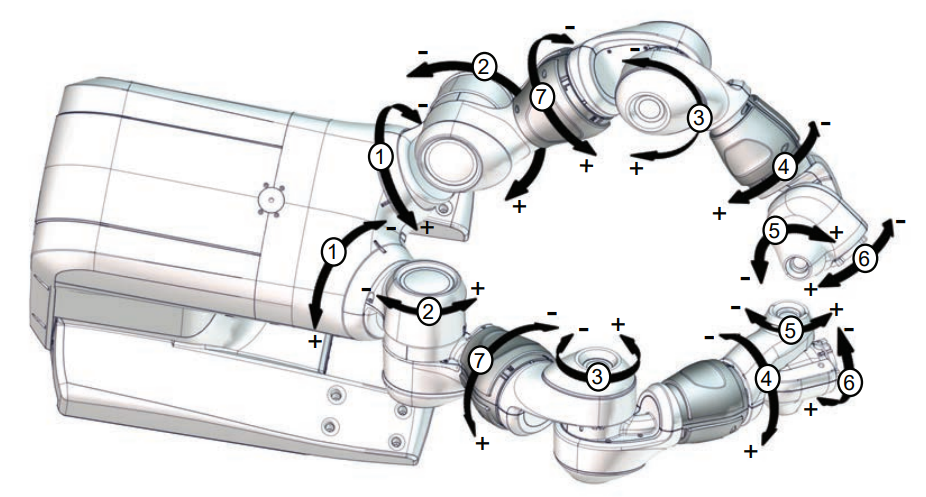
- ABB的两个七自由度双臂构成,值得注意的是:注意轴 7 位于 2 和轴 3 之间
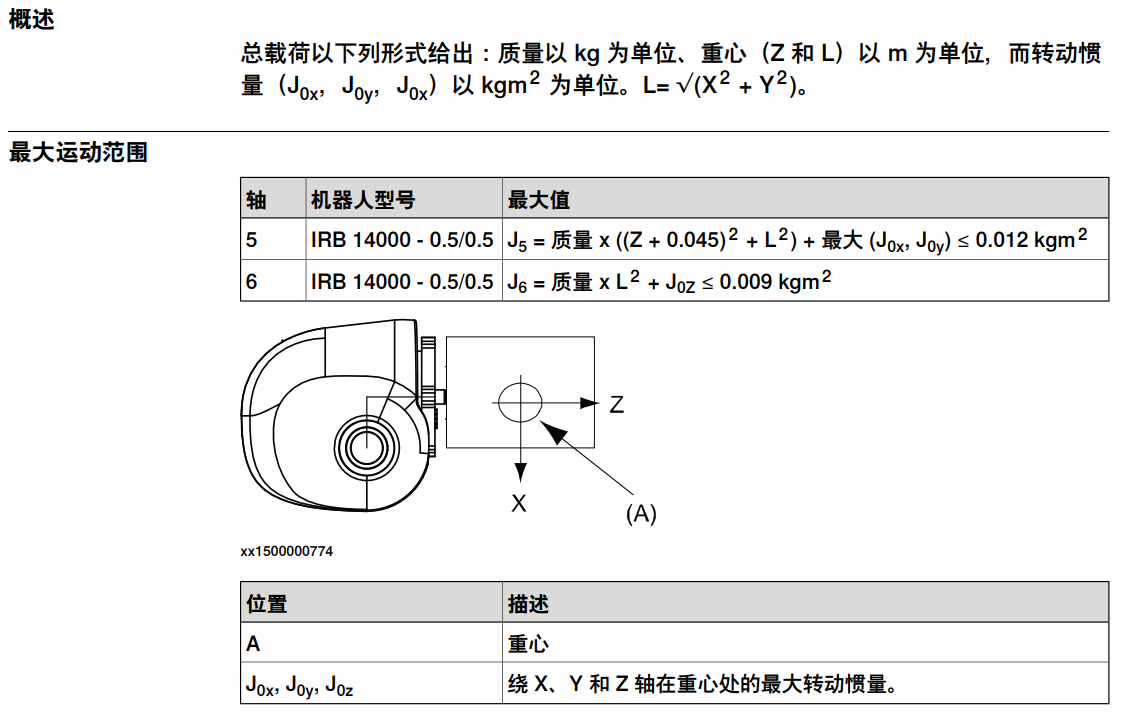
- ABB的一只机械臂可以处理的最大有效载荷是0.5kg,末端夹具质量280g(具体夹具质量看情况),真空发生器最大载荷150g

- ABB的扭矩范围

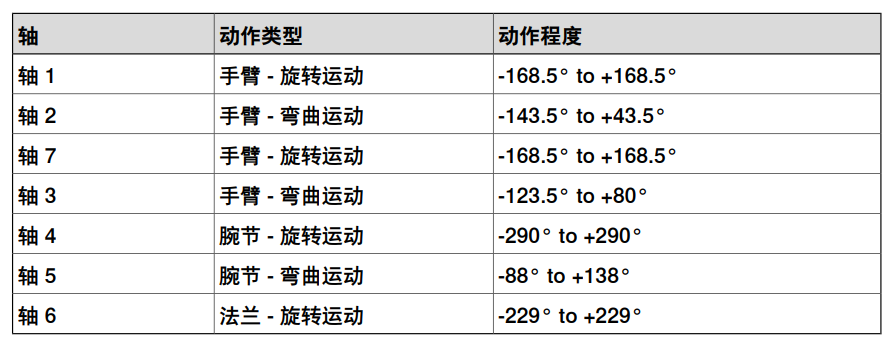
- 机械臂关节角范围和关节角速度限制

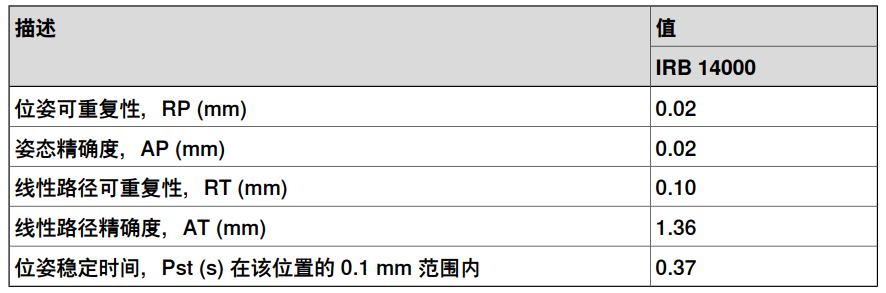
- ABB运动精度
三、ABB的手柄使用介绍
ABB的示教器FlexPendant可以直接操控机械臂,旧版的示教器如下所示:
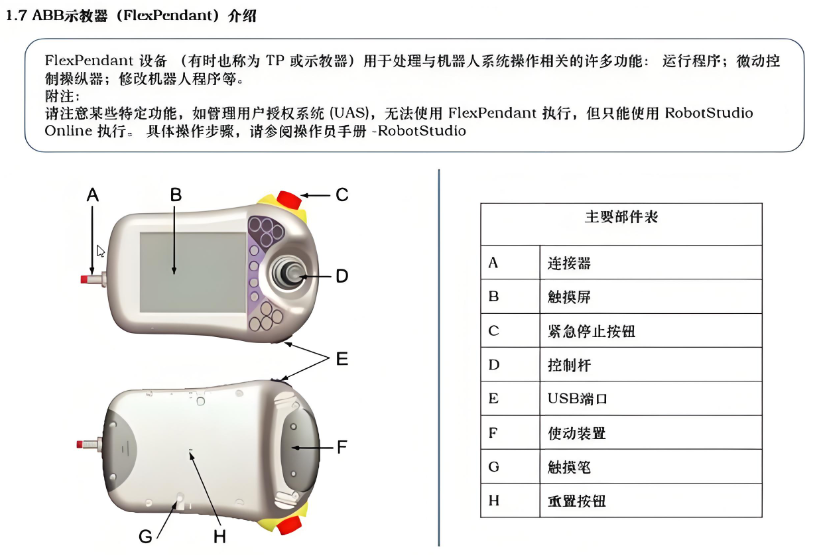
新版的示教器如下:

紧急停止按钮:在遇到紧急危险情况,左手按下紧急停止按钮,机械臂电机会断电,机械臂停止运动。如果想要机械臂再次运动,需要按下紧急停止按钮之后,向顺时针旋转,就会发现按钮向上弹起,这样就可以再次启动机械臂。
操纵杆:可以使用操纵杆控制机械臂的手臂运动,左右时操控y轴,上下是操控x轴,逆顺时针是操控z轴。
屏幕:屏幕是触屏的,可以直接在屏幕上点击操作,所以完全不需要使用右侧的按钮功能(按钮的功能可以直接触屏实现)
四、ABB仿真软件RobotStudio介绍
4.1 RobotStudio安装
安装参考教程RobotStudio 6.08安装
4.2 RobotStudio介绍
ABB的RobotStudio是一款由ABB公司开发的离线编程和仿真软件,专门用于工业机器人应用的规划、仿真、调试和优化。它为用户提供了一个强大的平台,可以在虚拟环境中模拟和测试机器人的动作、路径和工作流程,从而减少现场调试的时间和成本。其优点在于:
- 离线编程:用户可以在没有实际机器人硬件的情况下进行程序编写和测试。这大大减少了现场调试的时间和设备损耗
- 仿真与可视化:强大的仿真功能,能够模拟机器人的运动、操作、路径规划及工作环境。提供3D视觉界面,用户可以在虚拟环境中查看机器人动作,并进行精确调试和优化。
- 路径规划与优化:自动生成机器人路径,并提供路径优化功能,减少不必要的运动,提高效率。支持复杂的路径计算,包括避免碰撞和优化工作流程。
- 离线调试与优化:可以在仿真环境中进行调试,减少实际设备的测试次数,避免不必要的损耗。帮助用户发现潜在的错误和优化点,提高生产效率。
- 机器人集成:支持多种ABB工业机器人型号,适用于各种不同的机器人应用。兼容与集成其他设备,如传感器、夹具等,提供完整的自动化解决方案。
- 与其他ABB产品兼容:与ABB的机器人控制器、编程工具、自动化系统等紧密集成,能够无缝衔接其他ABB产品,提供一体化解决方案。
4.3 RobotStudio使用教程
下面给出几个基本教程以供大家学习:



















 4317
4317

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











