






实现内容:
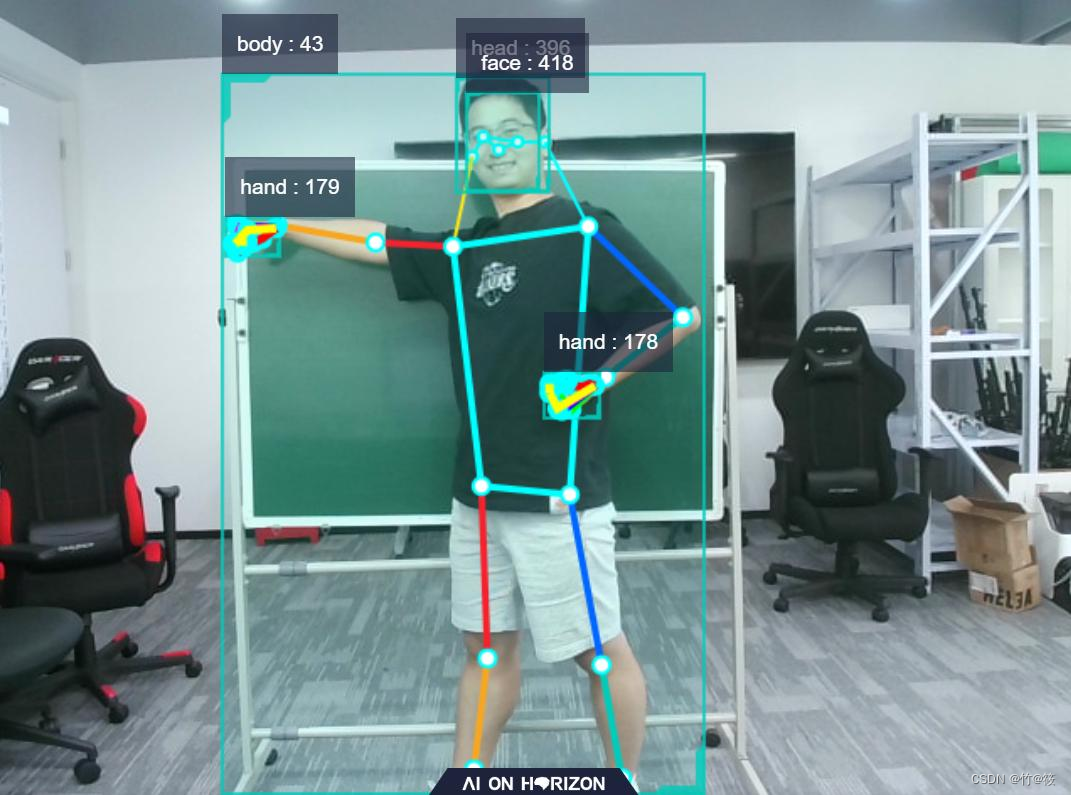
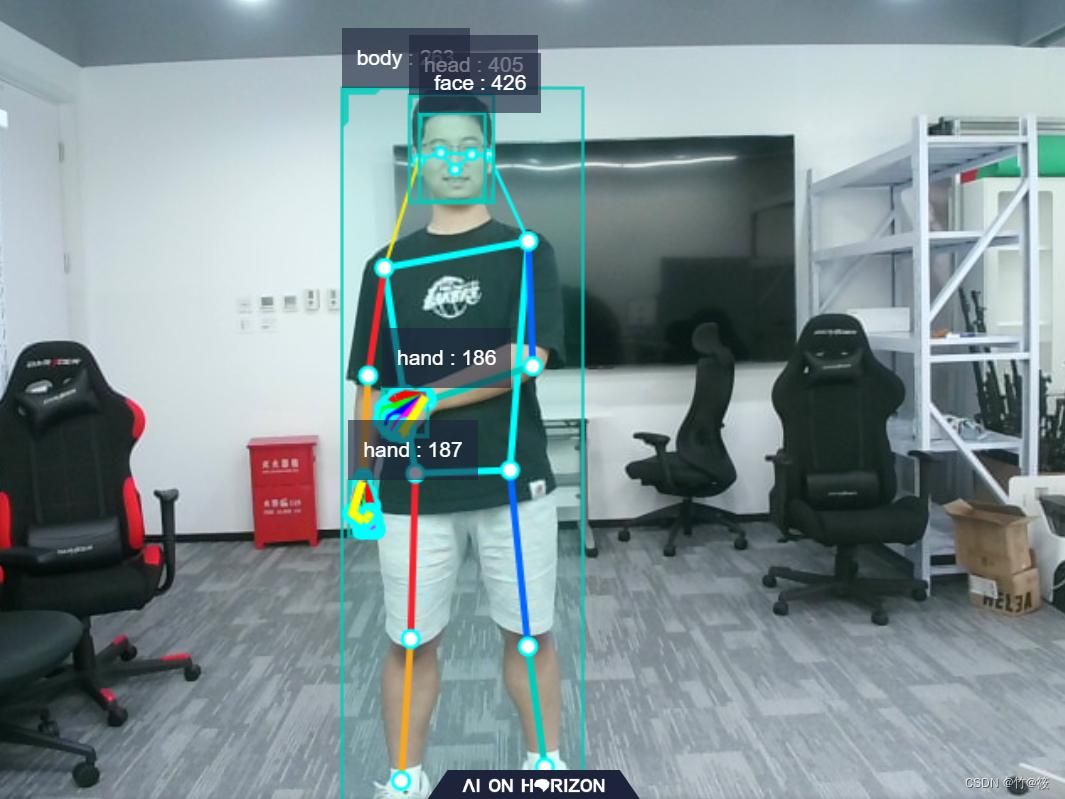
用USB摄像头通过旭日x3派的手势识别模块采集人体姿态,并按照协议在PC机上代替拳皇游戏中按键的输入,以实现在游戏中简单锻炼身体,并放松心情的目的。
准备工作
注: 需要提前准备好python环境
-
1 下载 Mame模拟器

点击 立即下载后,任选一下载地址即可,下载完成后需要解压,即可看到启动程序.
-
2 安装拳皇及配置相关设置
下载部分:
搞定了模拟器,还需要有游戏的roms才能运行,大家可以自行在网上找各种资源,这里提供的是拳皇
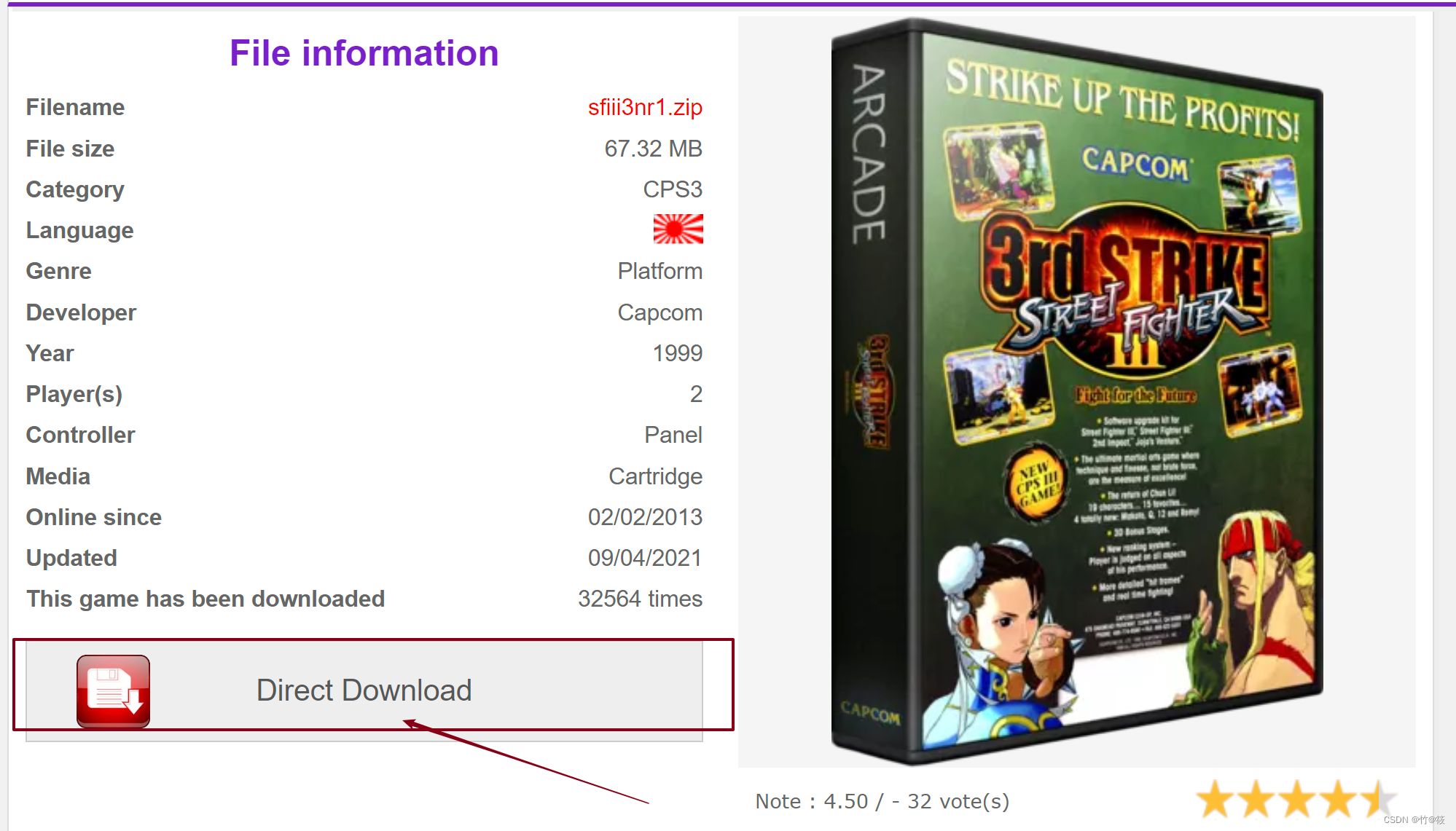
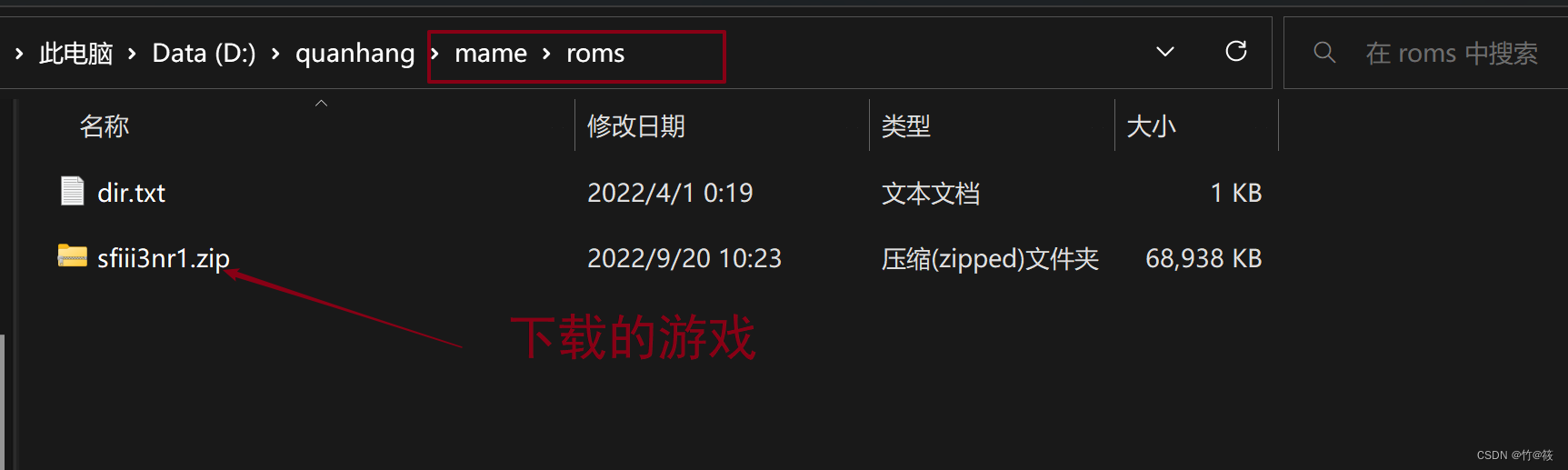
下载之后,将下载的zip文件直接放到刚才解压出来文件夹下面的roms下面。
接下来,在你刚才解压出来的文件夹目录下,在地址栏输入cmd,回车。
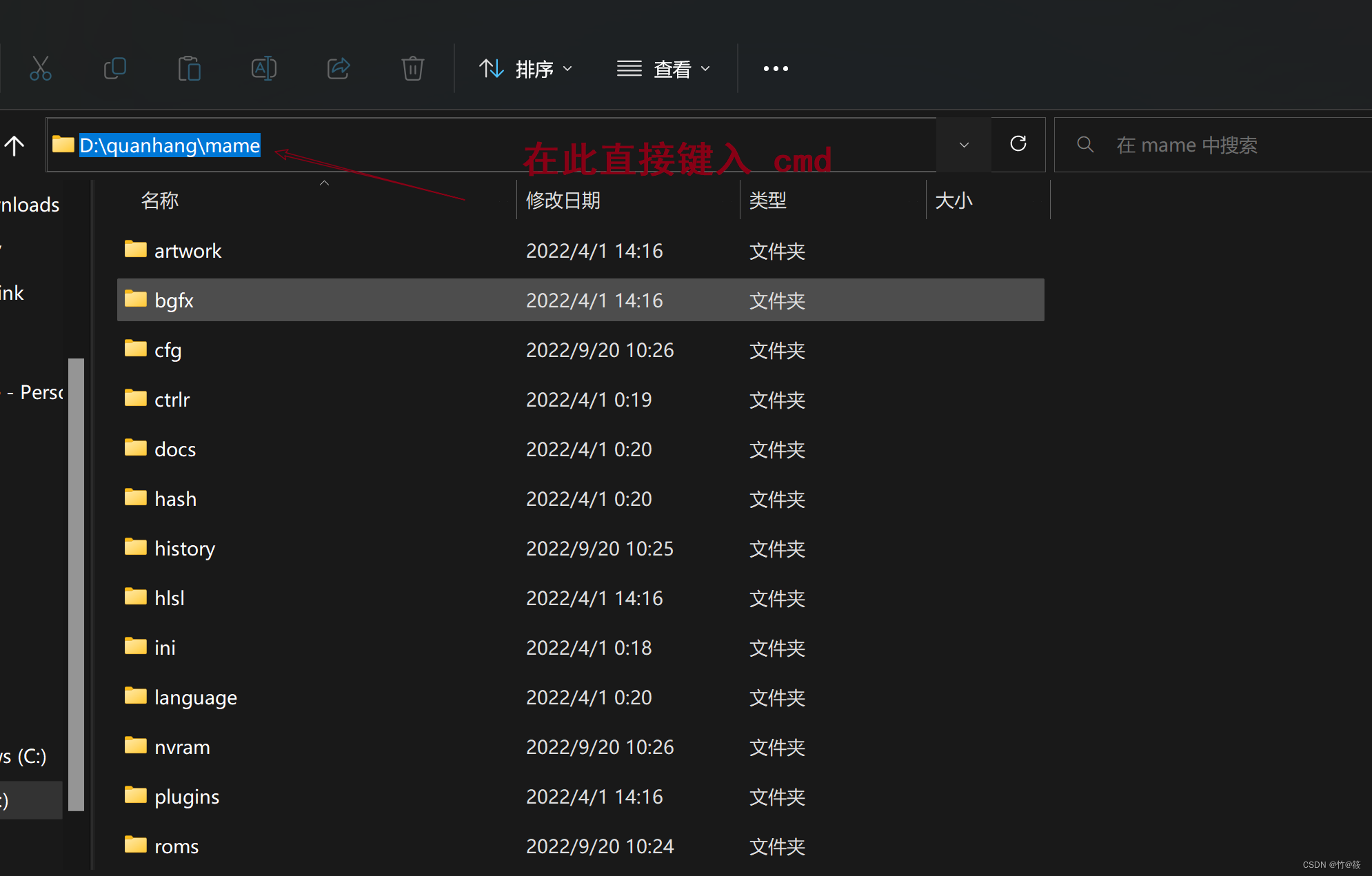
在弹出的命令行里 输入:
mame -keyboardprovider win32 sfiii3nr1
即可启动游戏
配置设置:按Tab键后 选择 Input(this machine) 进行部分按键更改 .更改时,注意鼠标双击需要更改的按键或者按Enter键选择需要更改的按键 ,然后在键盘上输入更改的按键, 注意有一秒左右的延时 不要重复键入

更改按键可参照以下 按键说明(将左边的对应更改为右边的即可):
‘COIN_P1’: ‘5’,
‘COIN_P2’: ‘6’,
‘P1_START’: ‘1’,
‘P2_START’: ‘2’,
‘P1_JPUNCH’: ‘L-CTRL’,
‘P2_JPUNCH’: ‘A’,
‘P1_RIGHT’: ‘RIGHT’,
‘P2_RIGHT’: ‘G’,
‘P1_LEFT’: ‘L’,
‘P2_LEFT’: ‘D’,
‘P1_DOWN’: ‘DOWN’,
‘P2_DOWN’: ‘F’,
‘P1_UP’: ‘UP’,
‘P2_UP’: ‘R’,
‘P1_SKICK’: ‘L-SHIFT’,
‘P2_SKICK’: ‘W’,
更改完成后按Esc退出即可
补充: 将游戏页面最小化 Ctrl+Esc 即可
- 3 windows 电脑端启动信号接收程序
import os
import re
import socket
import argparse
import time
from threading import Thread
try:
import win32api
import win32con
except ModuleNotFoundError:
os.system('pip3 install pywin32')
import win32api
import win32con
key2code = {'0': 48, '1': 49, '2': 50, '3': 51, '4': 52, '5': 53, '6': 54, '7': 55, '8': 56, '9': 57, 'a': 65,
'b': 66, 'c': 67, 'd': 68, 'e': 69, 'f': 70, 'g': 71, 'h': 72, 'i': 73, 'j': 74, 'k': 75, 'l': 76,
'm': 77, 'n': 78, 'r': 82, 'o': 79, 'p': 80, 'q': 81, 's': 83, 't': 84, 'u': 85, 'v': 86, 'w': 87, 'x': 88,
'y': 89, 'z': 90, '/0': 96,
'/1': 97, '/2': 98, '/3': 99, '/4': 100, '/5': 101, '/6': 102, '/7': 103, '/8': 104, '/9': 105, '*': 106,
'+': 107, 'enter': 108, '-': 109, '.': 110, '/': 111, 'f1': 112, 'f2': 113, 'f3': 114, 'f4': 115, 'f5': 116,
'f6': 117, 'f7': 118, 'f8': 119, 'f9': 120, 'f10': 121, 'f11': 122, 'f12': 123, 'backspace': 8, 'tab': 9,
'clear': 12, 'l-shift': 16, 'r-shift': 16, 'l-ctrl': 17, 'r-ctrl': 17, 'alt': 18, 'capslock': 20, 'esc': 27,
'space': 32,
'pageup': 33, 'pagedown': 34, 'end': 35, 'home': 36, 'left': 37, 'up': 38, 'right': 39, 'down': 40,
'insert': 45, 'delete': 46, 'help': 47, 'numlock': 144}
key2scan = {'numlock': [0x45, 0xc5], '/': [0xe035, 0xe0b5], '*': [0x09, 0x89], '-': [0x0c, 0x8c], '7': [0x08, 0x88],
'8': [0x09, 0x89], '9': [0x0a, 0x8a], '4': [0x05, 0x85], '5': [0x06, 0x86], '6': [0x07, 0x87],
'1': [0x02, 0x82], 'end': [0xe04f, 0xe0cf], '2': [0x03, 0x83], '3': [0x04, 0x84],
'pgdn': [0x51, 0xd1], '0': [0x0b, 0x8b], 'ins': [0x52, 0xd2], '.': [0x34, 0xb4], 'del': [0x53, 0xd3],
'+': [0x0d, 0x8d], 'enter': [0x1c, 0x9c], 'insert': [0xe052, 0xe0d2], 'page up': [0xe049, 0xe0c9],
'delete': [0xe053, 0xe0d3], 'page down': [0xe051, 0xe0d1], 'left': [0xe046, 0xe0c6],
'right': [0xe04d, 0xe0cd], 'up': [0xe048, 0xe0c8], 'down': [0xe050, 0xe0d0],
'esc': [0x01, 0x81], 'f1': [0x3b, 0xbb], 'f2': [0x3c, 0xbc], 'f3': [0x3d, 0xbd],
'f4': [0x3e, 0xbe], 'f5': [0x3f, 0xbf], 'f6': [0x40, 0xc0], 'f7': [0x41, 0xc1], 'f8': [0x42, 0xc2],
'f9': [0x43, 0xc3], 'f10': [0x44, 0xc4], 'f11': [0x57, 0xd7], 'f12': [0x58, 0xd8], '~': [0x29, 0xa9],
'·': [0x29, 0xa9], '<tab>': [0x0f, 0x8f], '!': [0x02, 0x82], 'q': [0x10, 0x90], '@': [0x03, 0x83],
'w': [0x11, 0x91], '#': [0x04, 0x84], 'e': [0x12, 0x12], '$': [0x05, 0x85], 'r': [0x13, 0x93],
'%': [0x06, 0x86], 't': [0x14, 0x94], '^': [0x07, 0x87], 'y': [0x15, 0x95], '&': [0x08, 0x88],
'u': [0x16, 0x96], 'i': [0x17, 0x97], '(': [0x0a, 0x8a], 'o': [0x18, 0x98], ')': [0x0b, 0x8b],
'p': [0x19, 0x99], '_': [0x0c, 0x8c], '{': [0x1a, 0x9a], '[': [0x1a, 0x9a], '=': [0x0d, 0x8d],
'}': [0x1b, 0x9b], ']': [0x1b, 0x9b], '|': [0x2b, 0xab], '\\': [0x2b, 0xab], 'backspace': [0x0e, 0x8e],
'capslock': [0x3a, 0xba], 'l-shift': [0x2a, 0xaa], 'a': [0x1e, 0x9e], 'z': [0x2c, 0xac],
's': [0x1f, 0x9f], 'x': [0x2d, 0xad], 'd': [0x20, 0xa0], 'c': [0x2e, 0xae], 'f': [0x21, 0xa1],
'v': [0x2f, 0xaf], 'g': [0x22, 0xa2], 'b': [0x30, 0xb0], 'h': [0x23, 0xa3], 'n': [0x31, 0xb1],
'j': [0x24, 0xa4], 'm': [0x32, 0xb2], 'k': [0x25, 0xa5], '<': [0x33, 0xb3], ',': [0x33, 0xb3],
'l': [0x26, 0xa6], '>': [0x34, 0xb4], ':': [0x27, 0xa7], ';': [0x27, 0xa7], '?': [0x35, 0xb5],
'': [0x35, 0xb5], '"': [0x28, 0xa8], '\'': [0x28, 0xa8], 'r-shift': [0x36, 0xb6], 'l-ctrl': [0x1d, 0x9d],
'l-alt': [0x38, 0xb8], 'space': [0x39, 0xb9], 'r-alt': [0xe038, 0xe0b8], 'r-ctrl': [0xe01d, 0xe09d], }
class SocketKeyBoard(object):
def __init__(self, ip, port=8000):
self.socket = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
self.socket.setsockopt(socket.SOL_SOCKET, socket.SO_REUSEADDR, 1)
print("socket bind " + ip + ":" + str(port))
self.socket.bind((ip, port))
self.socket.listen(128)
self.client_socket, self.client_addr = None, None
self.auto_thread = Thread(target=self.auto_run, args=())
self.auto_thread.start()
self.hold_key_list = {}
def auto_run(self):
while True:
time.sleep(0.01)
remove_key_list = []
for key in self.hold_key_list.keys():
if self.hold_key_list[key] < time.time():
self.press_key(key, win32con.KEYEVENTF_KEYUP)
remove_key_list.append(key)
for key in remove_key_list:
self.hold_key_list.pop(key)
@staticmethod
def press_key(key, code=0):
if code == 0:
print("press", key, time.time())
else:
print("release", key, time.time())
if key in key2code.keys():
if key2scan[key][0] & 0xff00 == 0xe000:
win32api.keybd_event(key2code[key], key2scan[key][0] & 0x00ff,
win32con.KEYEVENTF_EXTENDEDKEY | code, 0)
else:
win32api.keybd_event(key2code[key], key2scan[key][0], 0 | code, 0)
else:
print("get unexpected key: ", key)
def run(self):
total_len = 0
while True:
if self.client_socket:
rev_info = self.client_socket.recv(1024)
if not rev_info:
self.client_socket = None
continue
key_list = re.findall("\"(.*?)\"", rev_info.decode())
key_list = [key.strip().lower() for key in key_list]
for key in key_list:
total_len += 1
if 'hold' in key:
key_temp = key.split(':')[0]
keep_time = float(re.findall("hold(.*?)s", key.split(':')[1])[0])
self.hold_key_list[key_temp] = time.time() + keep_time
key = key_temp
self.press_key(key)
time.sleep(0.01)
for key in key_list:
if ':hold' in key:
continue
if key in key2code.keys():
self.press_key(key, win32con.KEYEVENTF_KEYUP)
else:
print("wait for connecting ...")
self.client_socket, self.client_addr = self.socket.accept()
print("connect success from: ", self.client_addr)
def parse_args():
description = "start web socket keyboard application"
parser = argparse.ArgumentParser(description=description)
parser.add_argument('--ip', help="the local ip number")
parser.add_argument('--port', help='set listen port ', default=8000)
args_ = parser.parse_args()
return args_
if __name__ == "__main__":
args = parse_args()
socket_keyboard = SocketKeyBoard(ip=args.ip, port=args.port)
socket_keyboard.run()
先将代码在PC机 上保存为 .py 文件,然后找到文件目录,并键入cmd
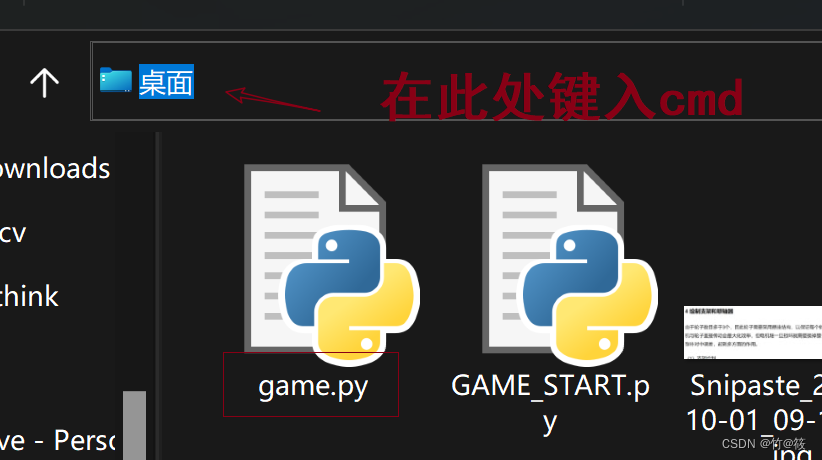
输入如下命令
python3 your_python_file --ip your_ip
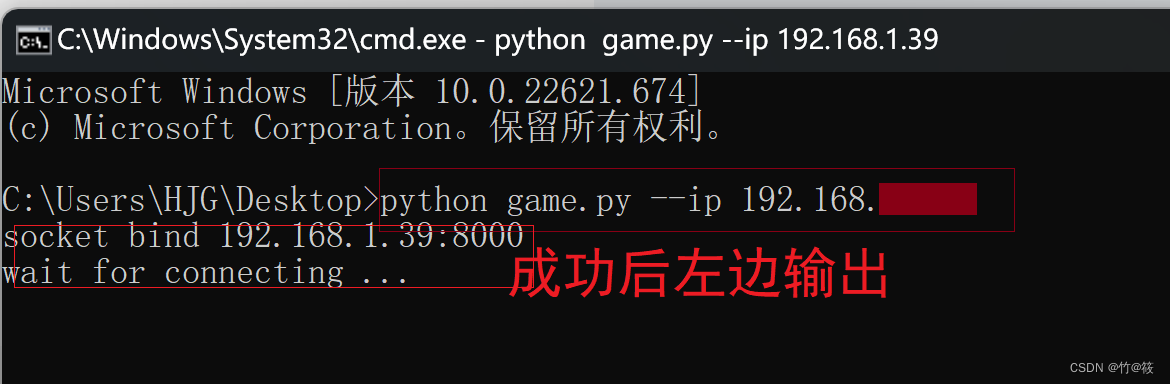
注意:
(1)用python3输入后没有上图所示输出,可用python代替继续尝试
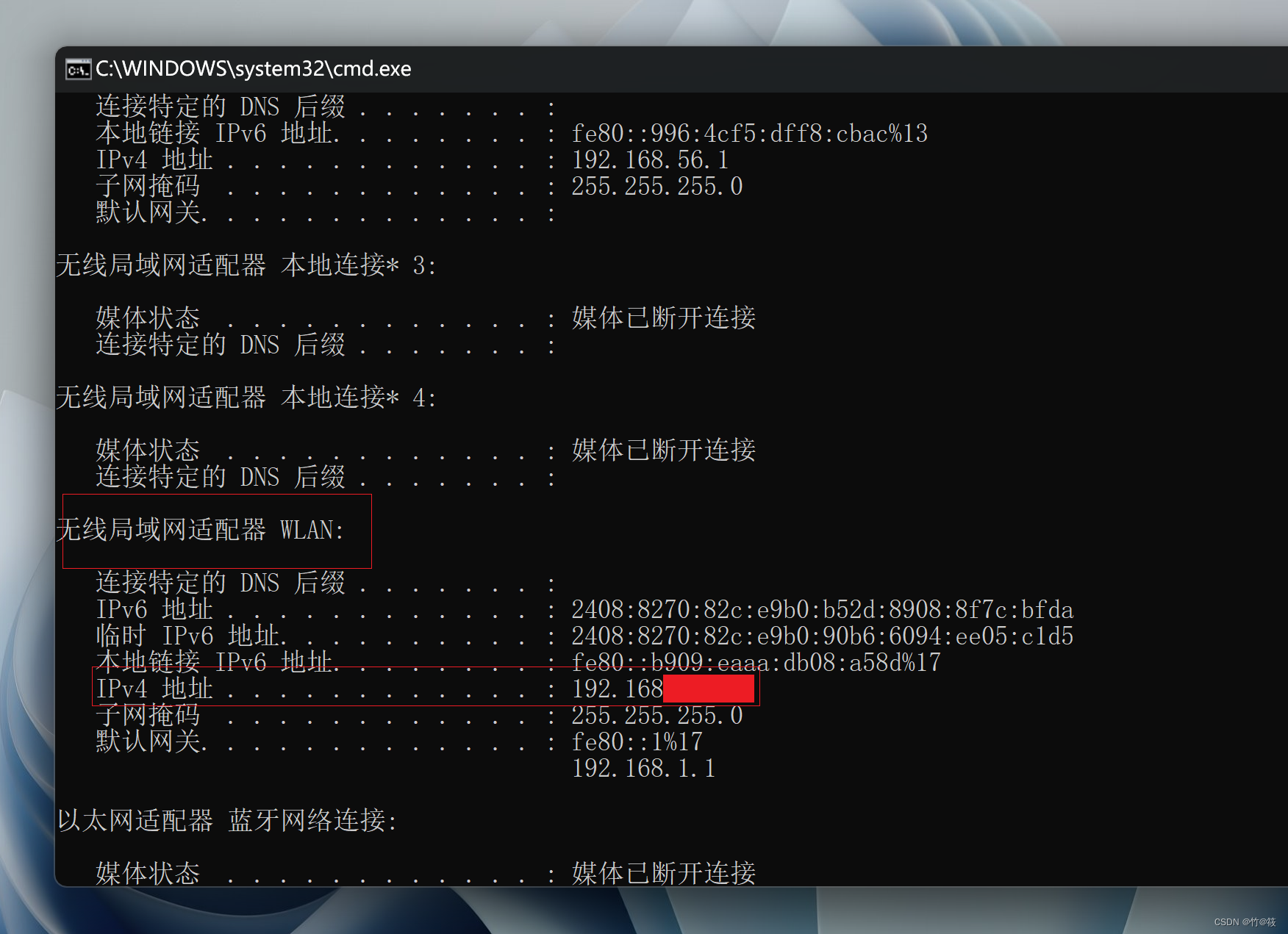
( 2) IP为自己PC机的IP 地址 可以在cmd命令提示符里面 键入 ipconfig 查询
import rclpy
import time
import socket
import math
import json
import argparse
from rclpy.node import Node
from ai_msgs.msg import PerceptionTargets
from threading import Thread
from collections import Counter
#Action to key mapping
ACTION2KEY = {
'COIN_P1': '5',
'COIN_P2': '6',
'P1_START': '1',
'P2_START': '2',
'P1_JPUNCH': 'L-CTRL',
'P2_JPUNCH': 'A',
'P1_RIGHT': 'RIGHT',
'P2_RIGHT': 'G',
'P1_LEFT': 'L',
'P2_LEFT': 'D',
'P1_DOWN': 'DOWN',
'P2_DOWN': 'F',
'P1_UP': 'UP',
'P2_UP': 'R',
'P1_SKICK': 'L-SHIFT',
'P2_SKICK': 'W',
}
"""
hand gesture:
0: Background, // 无手势
1: FingerHeart, // 比心
2: ThumbUp, // 大拇指向上
3: Victory, // V手势
4: Mute, // 嘘
10: Palm, // 手掌
11: Okay, // OK手势
12: ThumbRight, // 大拇指向右
13: ThumbLeft, // 大拇指向左
14: Awesome, // 666手势
"""
GESTURE_VICTORY = 3
GESTURE_OKAY = 11
GESTURE_AWESOME = 14
class PlayerState(object):
"""
Player status
There are two players by default.
left_arm_line: state of left arm
right_arm_line: state of right arm
up_or_down: control up and down or squat jump
kick: kick
left_gesture: left hand gesture
right_gesture: right hand gesture
time_stamp: timestamp
"""
def __init__(self, right_arm_line=False, left_arm_line=False, move_direction=0, kick=False, right_gesture=0,
left_gesture=0):
self.left_arm_line = left_arm_line
self.right_arm_line = right_arm_line
self.move_direction = move_direction
self.kick = kick
self.left_gesture = left_gesture
self.right_gesture = right_gesture
self.time_stamp = time.time()
def __str__(self):
return "\rarm " + str(self.left_arm_line) + " " + str(self.right_arm_line) + " move " + str(
self.move_direction) + " kick " + str(self.kick) + " gesture " + str(self.left_gesture) + " " + str(
self.right_gesture) + " " + str(self.time_stamp)
class Player(object):
"""
This class defines players.
state_list The list stores a series of action states of players, which are obtained by matching the results of key point detection with the corresponding actions.
Method def get_ Action() filters the player's state_list to get the final action.
Filtering is to ensure the stability of output action.
"""
def __init__(self, name):
self.state_list = []
self.id = 0
self.name = name
def get_action(self):
action_num = {}
buffer_time_step = 0.5
if len(self.state_list) < 15:
return [], {}
while self.state_list and time.time() - self.state_list[0].time_stamp > buffer_time_step:
self.state_list.pop(0)
if not self.state_list:
return [], {}
action_list = []
select_tile = len(self.state_list) // int(buffer_time_step / 0.2)
right_arm_list = [state.right_arm_line for state in self.state_list]
left_arm_list = [state.left_arm_line for state in self.state_list]
if right_arm_list[-select_tile:].count(True) - select_tile // 5 > right_arm_list[
-select_tile * 2:-select_tile].count(
True) or left_arm_list[-select_tile:].count(True) - select_tile // 5 > left_arm_list[
-select_tile * 2:-select_tile].count(
True):
action_list.append(self.name + '_JPUNCH')
action_num[self.name + '_JPUNCH'] = max(right_arm_list.count(True), left_arm_list.count(True))
left_gesture_list = [state.left_gesture for state in self.state_list]
right_gesture_list = [state.right_gesture for state in self.state_list]
if left_gesture_list.count(GESTURE_VICTORY) > (len(left_gesture_list) / 3 + 1) or right_gesture_list.count(
GESTURE_VICTORY) > (len(right_gesture_list) / 3 + 1):
action_list.append('COIN_' + self.name)
action_num['COIN_' + self.name] = max(left_gesture_list.count(GESTURE_VICTORY), right_gesture_list.count(
GESTURE_VICTORY))
elif left_gesture_list.count(GESTURE_OKAY) > (len(left_gesture_list) / 3 + 1) or right_gesture_list.count(
GESTURE_OKAY) > (len(right_gesture_list) / 3 + 1):
action_list.append(self.name + '_START')
action_num[self.name + '_START'] = max(left_gesture_list.count(GESTURE_OKAY), right_gesture_list.count(
GESTURE_OKAY))
move_direction_list = [state.move_direction for state in self.state_list]
if move_direction_list.count(1) > len(move_direction_list) / 2:
action_list.append(self.name + '_DOWN')
action_num[self.name + '_DOWN'] = move_direction_list.count(1)
elif move_direction_list.count(2) > len(move_direction_list) / 2:
action_list.append(self.name + '_UP')
action_num[self.name + '_UP'] = move_direction_list.count(2)
elif move_direction_list.count(3) > len(move_direction_list) / 2:
action_list.append(self.name + '_RIGHT')
action_num[self.name + '_RIGHT'] = move_direction_list.count(3)
elif move_direction_list.count(4) > len(move_direction_list) / 2:
action_list.append(self.name + '_LEFT')
action_num[self.name + '_LEFT'] = move_direction_list.count(4)
kick_list = [state.kick for state in self.state_list]
if kick_list.count(True) > (len(kick_list) / 10 + 1):
action_list.append(self.name + '_SKICK')
action_num[self.name + '_SKICK'] = kick_list.count(True)
return action_list, action_num
class Game(object):
"""
Instantiate players.
Give each player a unique ID.
To solve the track of key point detection_ For the problem that the player
cannot match after the ID changes, maintain a queue to store the ID.
"""
def __init__(self):
self.players = [Player("P1"), Player("P2")]
self.show_id_list = []
self.action_buffer = set()
self.action_nums = {}
def push_state(self, hand_match_dict, body_parser_dict):
for track_id in body_parser_dict.keys():
right_arm, left_arm, move_direction, kick = self.stat_detection(body_parser_dict[track_id])
self.show_id_list.append(track_id)
while len(self.show_id_list) > 100:
self.show_id_list.pop(0)
match_idx = -1
for player_idx in range(2):
if self.players[player_idx].id == track_id:
match_idx = player_idx
if match_idx == -1:
p0_sum = self.show_id_list.count(self.players[0].id)
p1_sum = self.show_id_list.count(self.players[1].id)
if p0_sum < 10:
self.players[0].id = track_id
match_idx = 0
elif p1_sum < 10:
self.players[1].id = track_id
match_idx = 1
if match_idx != -1:
right_gesture_id = 0
left_gesture_id = 0
if (track_id, 'left') in hand_match_dict:
left_gesture_id = hand_match_dict[(track_id, 'left')]
if (track_id, 'right') in hand_match_dict:
right_gesture_id = hand_match_dict[(track_id, 'right')]
self.players[match_idx].state_list.append(
PlayerState(right_arm, left_arm, move_direction, kick, left_gesture_id, right_gesture_id))
return self
@staticmethod
def stat_detection(points):
def is_line(a, b, c):
pow_len_a_b = (math.pow(a.x - b.x, 2) + math.pow(a.y - b.y, 2))
pow_len_b_c = (math.pow(b.x - c.x, 2) + math.pow(b.y - c.y, 2))
pow_len_a_c = (math.pow(a.x - c.x, 2) + math.pow(a.y - c.y, 2))
cosC = -(pow_len_a_b + pow_len_b_c - pow_len_a_c) / (2 * math.sqrt(pow_len_a_b) * math.sqrt(pow_len_b_c))
return cosC > 0.8
def is_y_similar(a, b, c):
x_a_c = abs(a.x - c.x)
if x_a_c < 0.1:
print("x is too small")
return False
y_a_c = abs(a.y - c.y)
x_y_ratio = y_a_c / x_a_c
return x_y_ratio < 0.4
def arm_status():
is_right_line = is_line(points[10], points[8], points[6])
is_right_y_similar = is_y_similar(points[10], points[8], points[6])
is_left_line = is_line(points[9], points[7], points[5])
is_left_y_similar = is_y_similar(points[9], points[7], points[5])
return is_right_line and is_right_y_similar, is_left_line and is_left_y_similar
def move_direction():
"""
0: stand
1: down
2: up
3: left
4: right
:return:
"""
# down
if abs(points[16].y - points[14].y) < abs(points[14].y - points[12].y) / 2 or abs(
points[15].y - points[13].y) < abs(points[13].y - points[11].y) / 2:
return 1
# up
if points[8].y < points[0].y or points[7].y < points[0].y:
return 2
middle_x = (points[5].x + points[6].x + points[12].x + points[11].x) / 4
middle_y = (points[5].y + points[6].y + points[12].y + points[11].y) / 4
# right
if points[10].x < middle_x and points[9].x < middle_x and points[9].y > middle_y:
return 3
# left
if points[10].x > middle_x and points[9].x > middle_x and points[10].y > middle_y:
return 4
return 0
def kick():
return (abs(points[16].y - points[13].y) < abs(points[15].y - points[14].y) and
points[14].y < points[12].y) or abs(points[15].y - points[14].y) < abs(
points[15].y - points[13].y) and points[13].y < points[11].y
right_arm_line_, left_arm_line_ = arm_status()
move_direction_ = move_direction()
kick_ = kick()
return right_arm_line_, left_arm_line_, move_direction_, kick_
def refresh_action(self):
for player in self.players:
action_list, action_num = player.get_action()
for action in action_list:
self.action_buffer.add(action)
self.action_nums = dict(Counter(self.action_nums) + Counter(action_num))
return self
def get_action(self):
return self.action_buffer, self.action_nums
def clear_action(self):
self.action_buffer.clear()
self.action_nums = {}
class socketer(object):
def __init__(self,ip,port):
self.ip = ip
self.port = port
self.socket = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
self.connect()
def connect(self):
while True:
try:
self.socket.close()
self.socket = socket.socket(socket.AF_INET, socket.SOCK_STREAM)
self.socket.connect((self.ip, self.port))
print('connect success')
return
except socket.error as e:
print('connect failed', e)
time.sleep(1)
def send(self, data):
try:
data = json.dumps(data)
print(data)
self.socket.send(bytes(data.encode('utf-8')))
except socket.error:
self.connect()
except:
assert 0
class MinimalSubscriber(Node):
def __init__(self, args):
super().__init__('minimal_subscriber')
self.subscription = self.create_subscription(
PerceptionTargets,
'/hobot_hand_gesture_detection',
self.listener_callback,
10)
self.subscription # prevent unused variable warning
self.socketer = socketer(ip=args.ip, port=args.port)
self.game = Game()
self.auto_thread = Thread(target=self.auto_step, args=())
self.auto_thread.start()
def auto_step(self):
need_hold_list = ['P1_RIGHT', 'P2_RIGHT', 'P1_LEFT', 'P2_LEFT', 'P1_DOWN', 'P2_DOWN'] #'P1_UP', 'P2_UP',
old_action_list=[]
old_action_num = {}
while True:
time.sleep(0.1)
action_list, action_num = self.game.get_action()
for act in old_action_list:
if act in action_list:
action_list.remove(act)
old_action_list = action_list.copy()
key_list = []
for act in action_list.copy():
key_ = ACTION2KEY[act]
print(act, action_num)
if act in need_hold_list and act in old_action_num.keys() and (action_num[act] >= old_action_num[act]-20 and action_num[act] > 10):
key_+=':hold0.3s'
key_list.append(key_)
if key_list:
self.socketer.send(key_list)
old_action_num = action_num.copy()
self.game.clear_action()
def hand_match(self, hand_parser_list, body_parser_dict):
def distance(x1, y1, x2, y2):
return math.sqrt(math.pow(x1 - x2, 2) + math.pow(y1 - y2, 2))
hand_match_dict = {}
for hand_info in hand_parser_list:
min_distance = 10000
match_flag = (-1, 'left')
for track_id in body_parser_dict.keys():
new_distance = distance(body_parser_dict[track_id][18].x, body_parser_dict[track_id][18].y,
hand_info[1][0], hand_info[1][1])
if hand_info[1][1] > body_parser_dict[track_id][0].y:
continue
if new_distance < min_distance and new_distance < 40:
min_distance = new_distance
match_flag = (track_id, 'right')
new_distance = distance(body_parser_dict[track_id][17].x, body_parser_dict[track_id][17].y,
hand_info[1][0], hand_info[1][1])
if new_distance < min_distance and new_distance < 40:
min_distance = new_distance
match_flag = (track_id, 'left')
if match_flag[0] != -1:
hand_match_dict[match_flag] = hand_info[0]
return hand_match_dict
def get_body_hand_info(self, msg):
body_parser_dict = {}
hand_parser_list = []
for targeter in msg.targets:
track_id = targeter.track_id
if len(targeter.points) == 0:
continue
point_object = targeter.points[0]
if point_object.type == 'body_kps':
body_points = point_object.point
body_points_confidence = point_object.confidence
if sum(body_points_confidence)/len(body_points_confidence) < 0.7:
break
body_parser_dict[track_id] = body_points
if point_object.type == 'hand_kps':
average_x = 0.0
average_y = 0.0
hand_points = point_object.point
for p in hand_points:
average_x += p.x
average_y += p.y
average_x /= len(hand_points)
average_y /= len(hand_points)
if len(targeter.attributes) > 0 and targeter.attributes[0].type == 'gesture':
gesture_id = targeter.attributes[0].value
hand_parser_list.append((gesture_id, (average_x, average_y)))
hand_match_dict = self.hand_match(hand_parser_list, body_parser_dict)
return hand_match_dict, body_parser_dict
def listener_callback(self, msg):
# By monitoring the detected key points, the status information of the body and hands can be obtained.
#fps = msg.fps
#print(fps)
hand_match_dict, body_parser_dict = self.get_body_hand_info(msg)
self.game.push_state(hand_match_dict, body_parser_dict).refresh_action()
return None
def main(args):
rclpy.init()
minimal_subscriber = MinimalSubscriber(args)
rclpy.spin(minimal_subscriber)
# Destroy the node explicitly
# (optional - otherwise it will be done automatically
# when the garbage collector destroys the node object)
minimal_subscriber.destroy_node()
rclpy.shutdown()
def parse_args():
description = "start web socket keyboard application"
parser = argparse.ArgumentParser(description=description)
parser.add_argument('--ip', help="the local ip number")
parser.add_argument('--port', help='set listen port ', default=8000)
args_ = parser.parse_args()
return args_
if __name__ == '__main__':
args = parse_args()
main(args)
使用说明
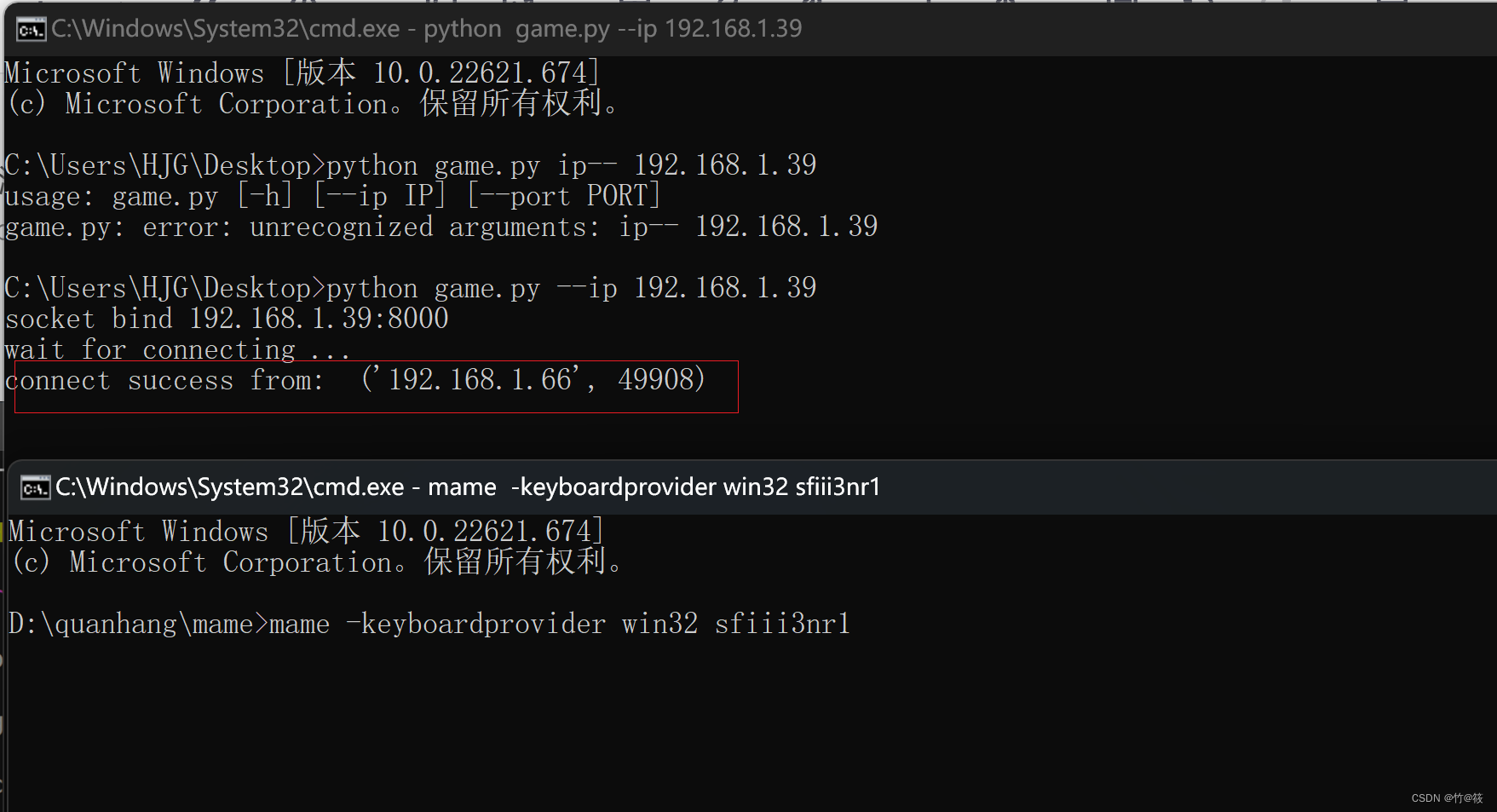
- 1 在windows 端 进入文件保存位置 输入cmd 运行准备工作3中的代码文件(Ip 地址为PC机);
python3 your_python_file --ip your_ip
- 2 启动下载的游戏(启动之前,一定要先设置输入法为英文模式),启动代码如下,启动方式如之前介绍;
mame -keyboardprovider win32 sfiii3nr1
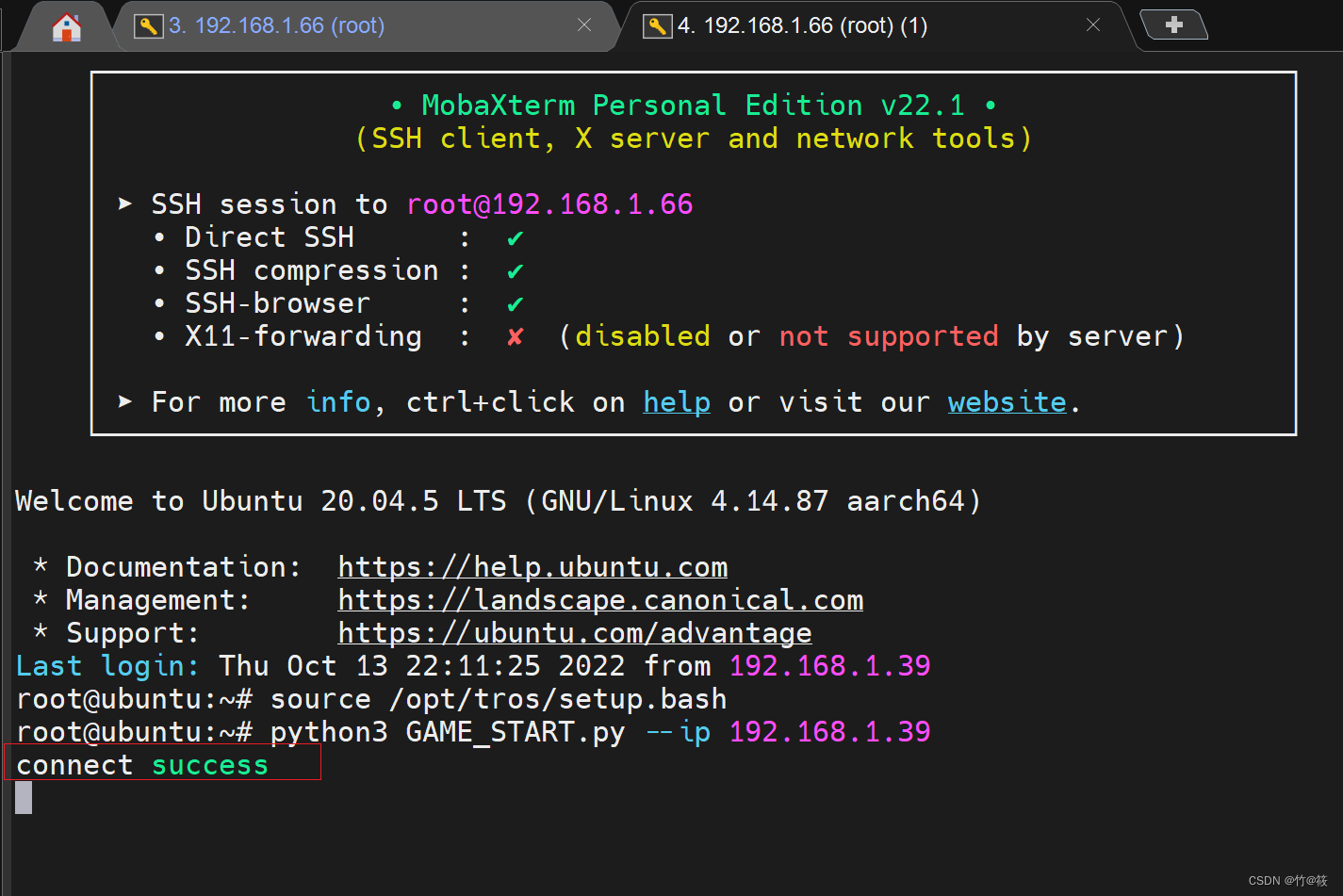
- 3 在x3派上,先启动手势检测的示例,然后再新开一个终端,刷新化境变量
source /opt/tros/setup.bash
接着在终端运行保存进旭日x3派章节的python脚本(注意!!IP地址与第一步地址一样)。
python3 your_python_file --ip your_remote_computer_ip
成功后板端有如下输出
PC端分别如下所示
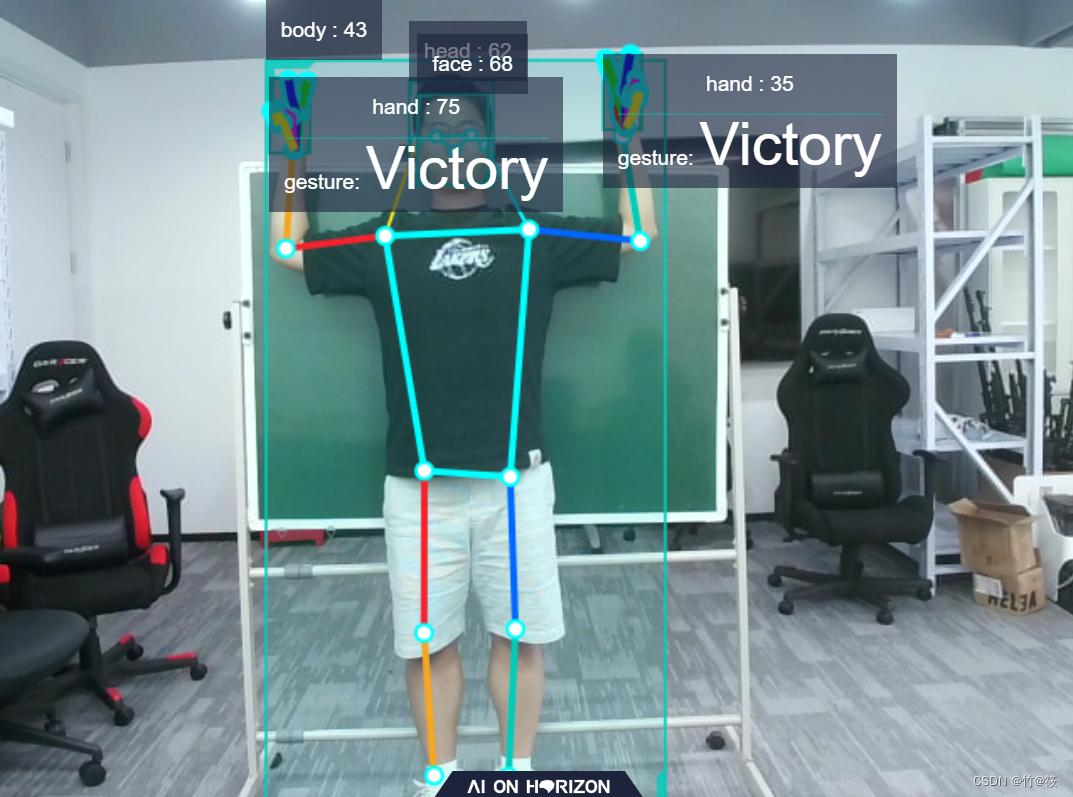
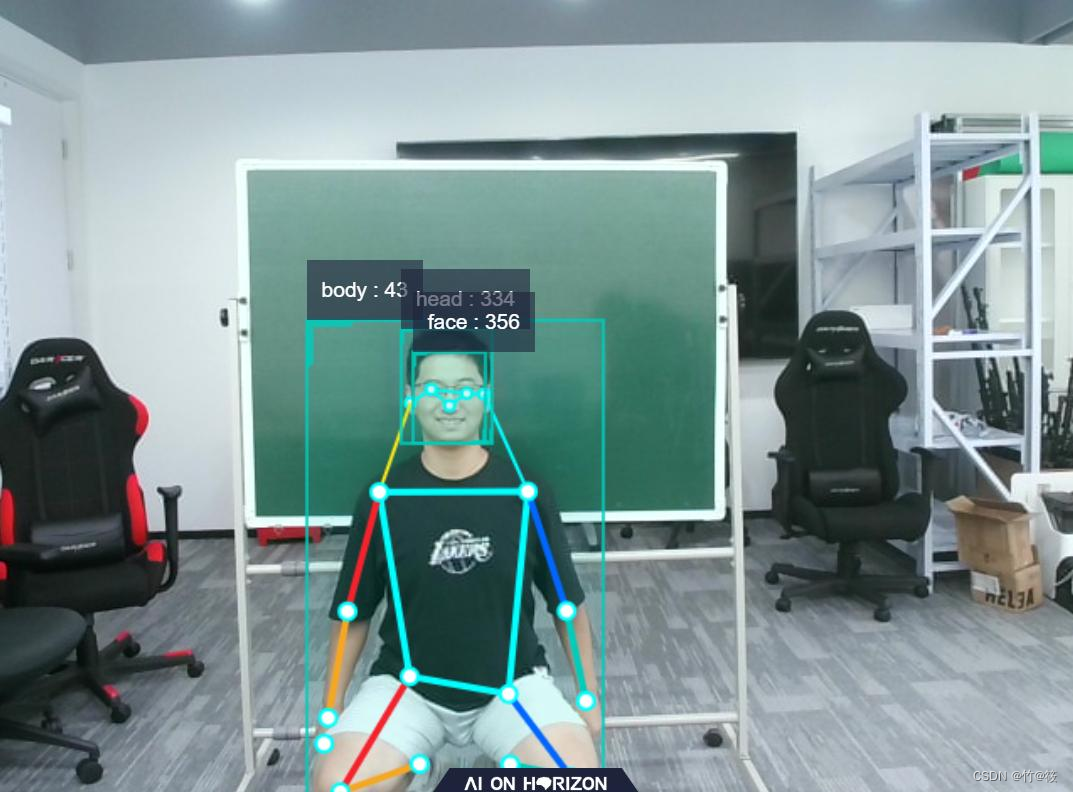
注:使用摄像头时,要保证摄像头能够采集全身信息,人体距离摄像头4~5米。
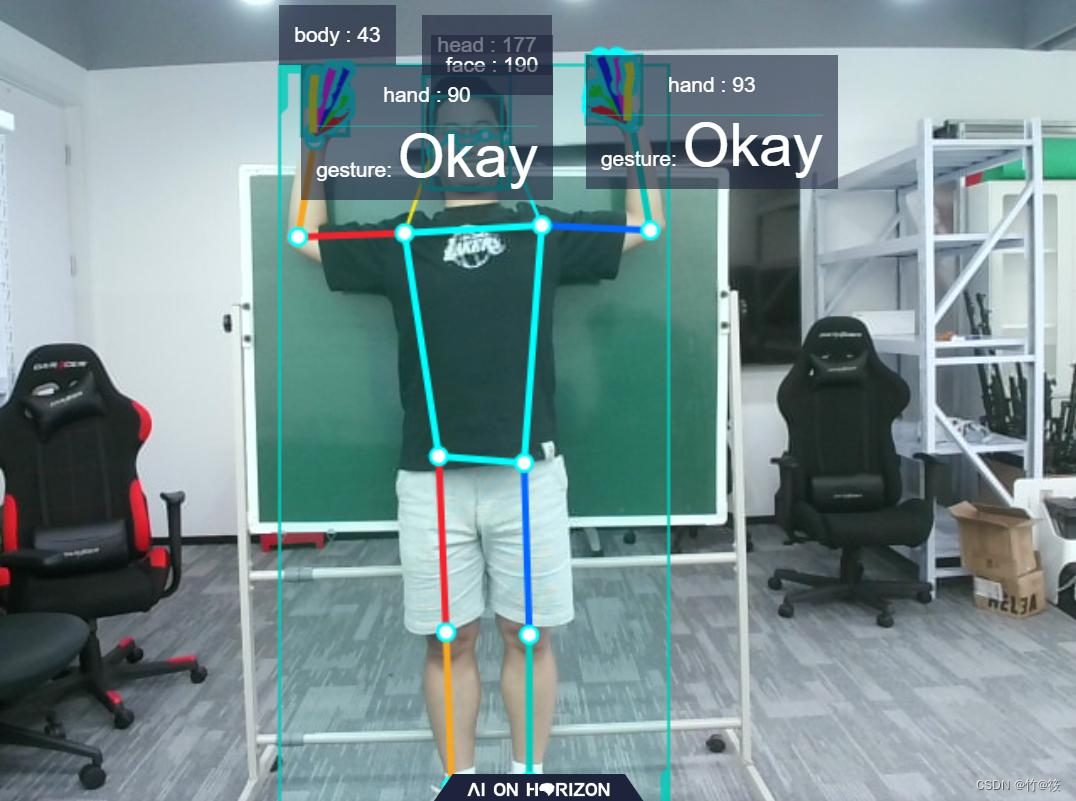
手势说明
投币:
开始(start):
上 or 跳:
下 or 蹲:
踢腿:
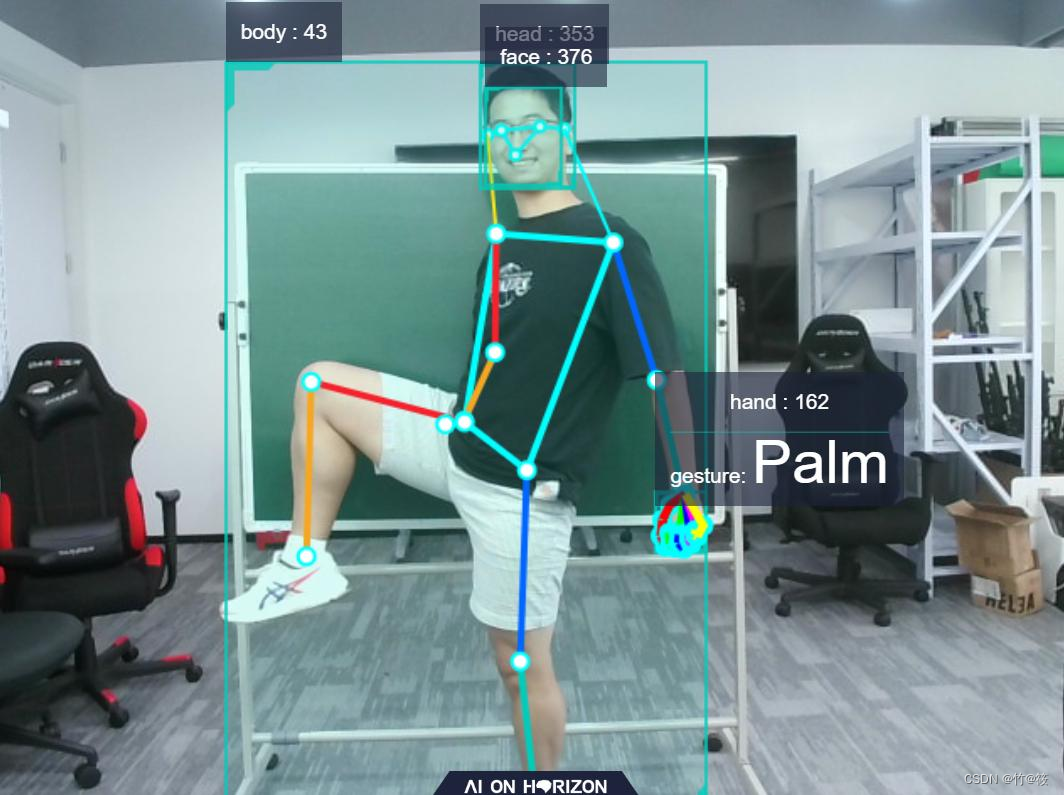
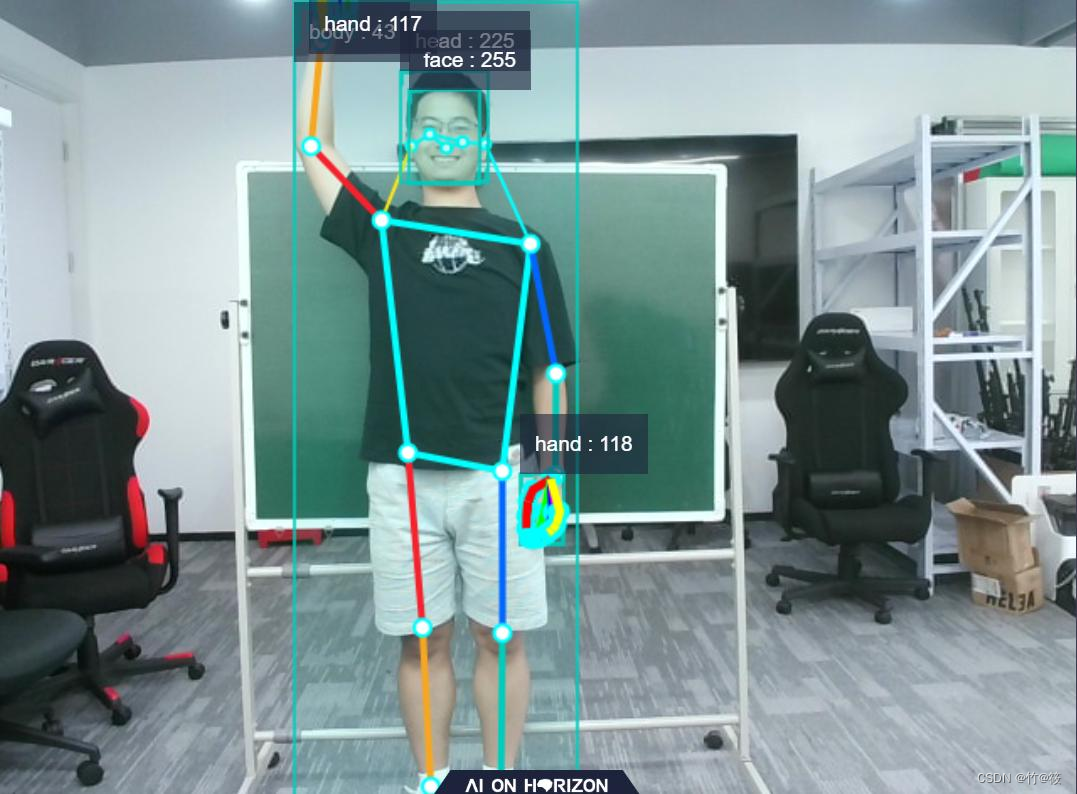
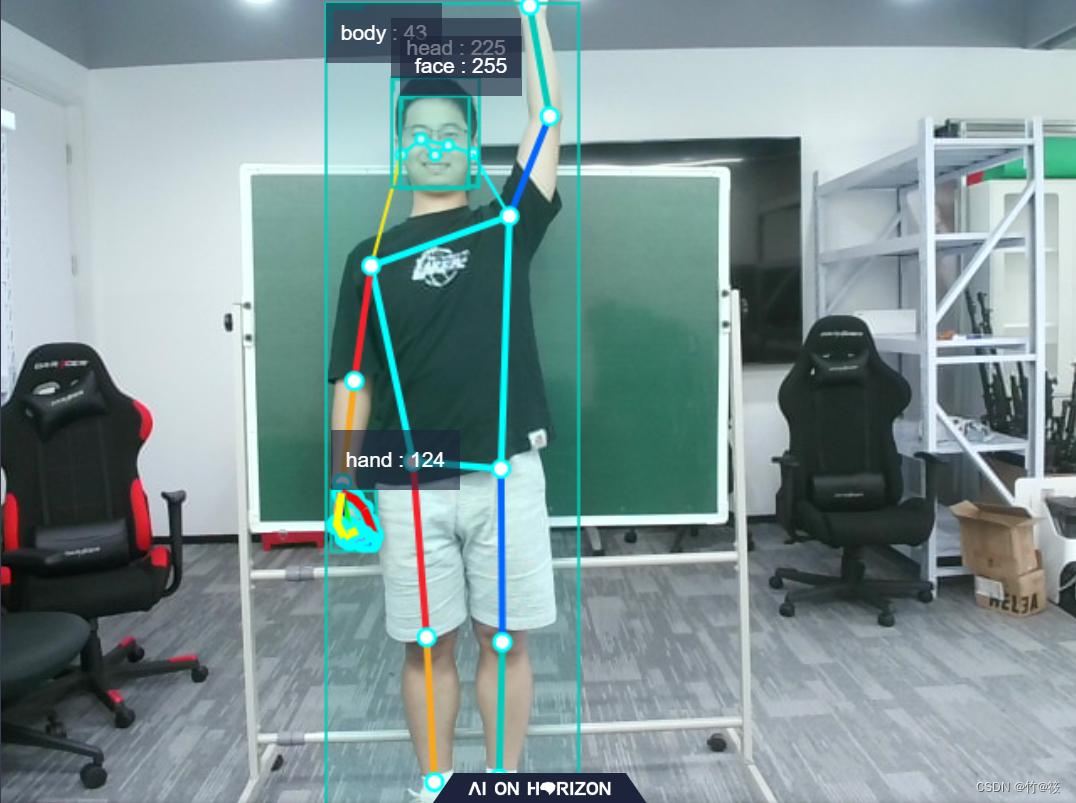
出拳:
左右:
在掌握手势说明后,就可以开始你沉浸式的体验啦!!
文章参考自

原文章地址 https://developer.horizon.ai/forumDetail/112555512834430487















 1940
1940











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









