






问题:
[ERROR] [1697018044.166249]: Error processing request: Lookup would require extrapolation into the past. Requested time 1697018034.165498972 but the earliest data is at time 1697018059.691534996, when looking up transform from frame [base] to frame [right_gripper]
原因:
这是由于在ROS节点中尝试查询变换数据时,时间戳不正确引起的。错误消息表明请求的时间戳1696993997.065584898 在可用的变换数据的时间范围之前,最早的数据时间戳为1696994022.591542006。这通常表明在请求时间之前没有可用的变换数据。
对于这个问题,是由于我完成相机标定时,由于Baxter机器人没有连接外网,导致机器人本体的时间与我用电脑操控的机械臂的时间不同步导致的。
解决:
方案1:
1.连接到Baxter机器人:首先,确保你已经通过网络连接到Baxter机器人,可以使用有线连接路由器的方式。
2.检查计算机上的NTP服务:首先,检查你的计算机上是否已经运行NTP服务。你可以运行以下命令来检查:
sudo service ntp status如果服务未运行,你可以使用以下命令启动它:
sudo service ntp start
3.重启计算机的NTP服务:重新启动NTP服务以使更改生效:
sudo service ntp restart
4.校验时间同步:你可以使用以下命令来检查你的计算机的时间是否已经与NTP服务器同步:
ntpq -p
5.时区设置:确保Baxter机器人的时区设置正确。在输出中,你提到的时间是以“CST”(中国标准时间)表示的,确保时区设置为正确的时区。你可以使用以下命令来查看和设置时区:
-
查看当前时区设置:
-
date
设置时区(以设置为UTC为例,可根据你的时区进行替换):
sudo timedatectl set-timezone UTC
6.时间同步频率:时间同步可能需要一些时间才能完全同步。请耐心等待一段时间,查看时间是否逐渐变得准确。
完成以上操作,问题就解决了。
方案2:
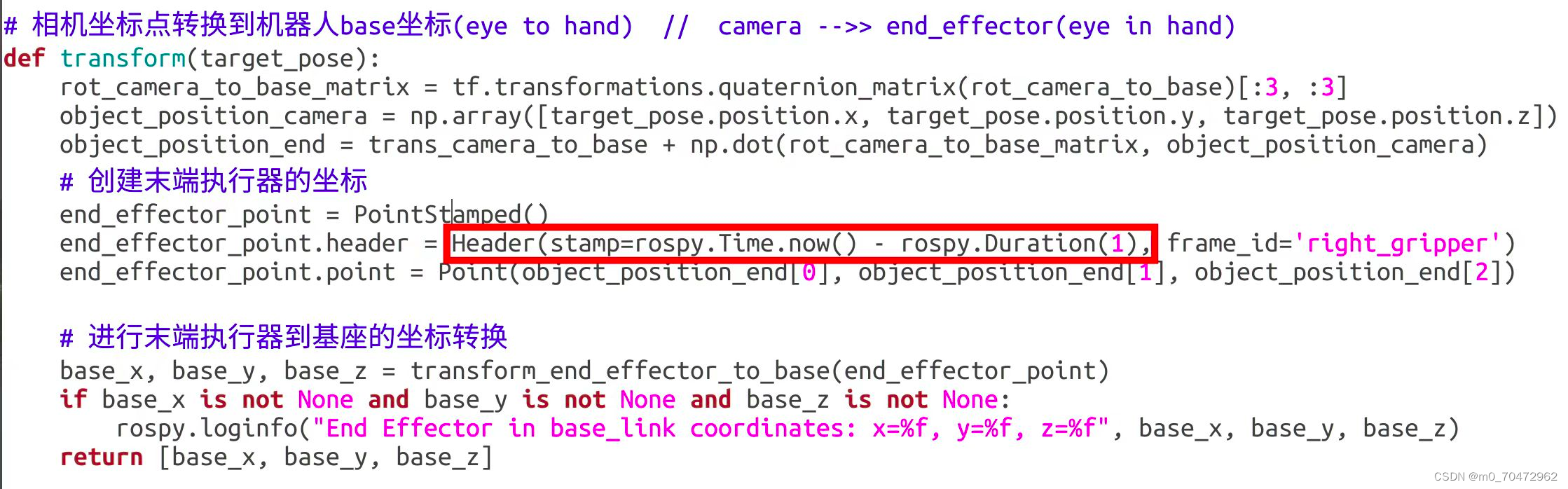
在相应代码位置直接减去一个时间也能解决问题。
谢谢!!!















 1276
1276











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









