






-
内容参考:
ThreadX学习(4)——内存管理_tx_pool_error-CSDN博客
在此基础上添加实现代码。
ThreadX中的内存分配有两种方法:内存字节池和内存块池。
内存字节池:
1.tx_byte_pool_create
TX_BYTE_POOL my_pool;//先定义一个内存字节池
UINT tx_byte_pool_create( TX_BYTE_POOL *pool_ptr,
CHAR *name_ptr,
VOID *pool_start,
ULONG pool_size)- 第 1 个参数 pool_ptr 是内存字节池控制块指针。
- 第 2 个参数 name_ptr 是字节池名。
- 第 3 个参数 pool_start 是字节池的首地址。
- 第 4 个参数 pool_size 是字节池的长度。
在示例代码中创造内存字节池,再把返回值打印出来,可以看到串口打印结果为0,即内存字节池创造成功。
VOID tx_application_define(void *first_unused_memory)
{
UINT aa= tx_byte_pool_create(&byte_POOL_0,"bytepool 0",first_unused_memory,256);
char buffer[256];
snprintf(buffer,sizeof(buffer),"%u\n",aa);
HAL_UART_Transmit(&huart1, (uint8_t *)buffer, strlen(buffer), HAL_MAX_DELAY);
/* Create the main thread. */
tx_thread_create(&thread_0, "thread 0", thread_0_entry, 0,
thread_0_stack, DEMO_STACK_SIZE,
1, 1, 10, TX_AUTO_START);
tx_thread_create(&thread_1, "Thread 1", thread_1_entry, 0,
thread_1_stack, DEMO_STACK_SIZE,
2, 2, TX_NO_TIME_SLICE, TX_AUTO_START);
}
2.tx_byte_allocate
分配内存字节池函数
一般写在线程内部,用来给线程分配内存字节池。
UINT tx_byte_allocate( TX_BYTE_POOL *pool_ptr,
VOID **memory_ptr,
ULONG memory_size,
ULONG wait_option)
第 1 个参数 pool_ptr 是内存字节池控制块指针。
第 2 个参数 memory_ptr 是字节池分配空间首地址的指针。
第 3 个参数 memory_size是字节池分配空间大小。
第 4 个参数 wait_option是字节池分配等待选项:
TX_NO_WAIT:不等待,直接返回结果。
TX_WAIT_FOREVER:一直等待直到获取字节池空间。
timeout value:设置等待时间(时钟脉冲)。
返回值:
TX_SUCCESS(0x00)成功分配字节池。
TX_DELETED: (0x01)线程挂起时内存池被删除。
TX_NO_MEMORY: (0x10) 无法在指定的等待时间内分配内存。
TX_WAIT_ABORTED: (0x1A)挂起被另一个线程、计时器或ISR中止。
TX_POOL_ERROR:(0x02)无效的内存池指针。
TX_PTR_ERROR:(0x03)指向目标指针的指针无效。
TX_SIZE_ERROR: (0X05)请求的大小是0或大于池的总大小。
TX_WAIT_ERROR: (0x04)在非线程调用时指定了TX_NO_WAIT以外的等待选项。
TX_CALLER_ERROR:(0x13)无效的服务调用者。
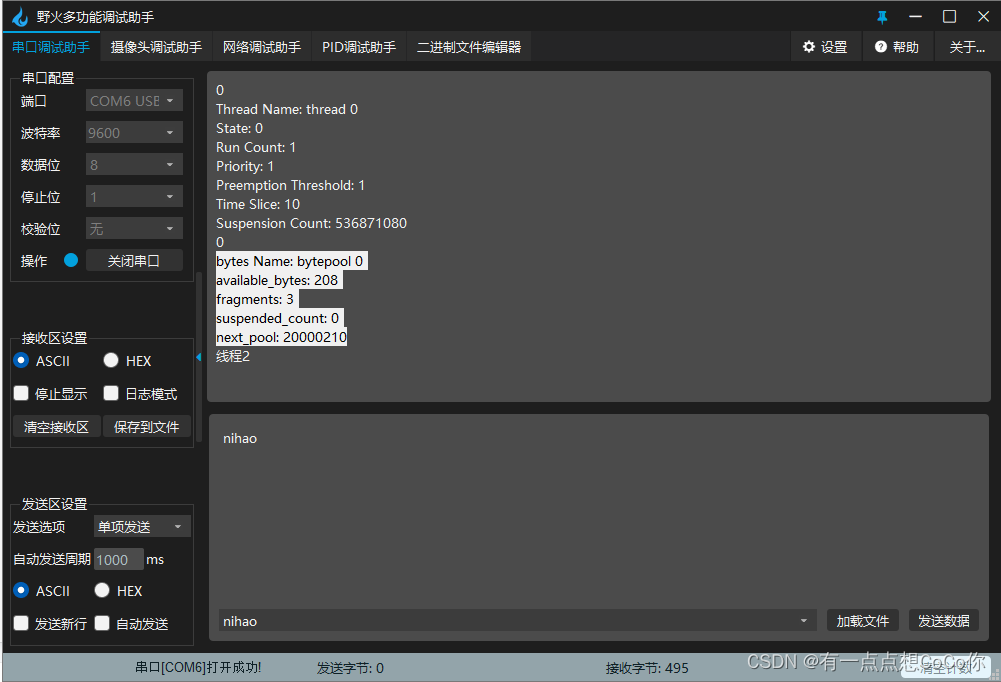
下面的示例代码,给线程0申请了一个32字节大小的内存空间, 申请后,通过调用tx_byte_pool_info_get函数得到内存池信息。可以看到256字节大小的内存池变成了208字节大小少的4字节是内存管理开销。
void thread_0_entry(ULONG thread_input)
//线程,串口发送数据
{
TX_THREAD *thread_ptr;
CHAR *name_ptr;
UINT state;
ULONG run_count;
UINT priority;
UINT preemption_threshold;
ULONG time_slice;
UINT suspension_count;
TX_THREAD *next_thread;
TX_THREAD *previous_thread;
VOID *memory_ptr;
char *name;
ULONG available_bytes;
ULONG fragments;
TX_THREAD *first_suspended;
ULONG suspended_count;
TX_BYTE_POOL *next_pool;
// 缓冲区用于格式化输出字符串
char buffer1[256];
// 获取当前线程的指针
thread_ptr = tx_thread_identify();
// 获取当前线程信息
tx_thread_info_get(thread_ptr, &name_ptr, &state, &run_count, &priority, &preemption_threshold,
&time_slice, &next_thread, &previous_thread);
// 格式化线程信息为字符串
snprintf(buffer1, sizeof(buffer1),
"Thread Name: %s\nState: %u\nRun Count: %lu\nPriority: %u\nPreemption Threshold: %u\nTime Slice: %lu\nSuspension Count: %u\n",
name_ptr, state, run_count, priority, preemption_threshold, time_slice, suspension_count);
// 通过UART发送线程信息
HAL_UART_Transmit(&huart1, (uint8_t *)buffer1, strlen(buffer1), HAL_MAX_DELAY);
UINT byteask= tx_byte_allocate(&byte_POOL_0,&memory_ptr,32,TX_NO_WAIT);
snprintf(buffer1, sizeof(buffer1), "%u\n",byteask);
HAL_UART_Transmit(&huart1,(uint8_t *)buffer1,strlen(buffer1),HAL_MAX_DELAY);
tx_byte_pool_info_get(&byte_POOL_0,&name,&available_bytes,&fragments,&first_suspended,&suspended_count,&next_pool);
snprintf(buffer1, sizeof(buffer1),
"bytes Name: %s\navailable_bytes: %lu\nfragments: %lu\nsuspended_count: %lu\nnext_pool: %p\n",
name,available_bytes,fragments,suspended_count,next_pool);
// 通过UART发送线程信息
HAL_UART_Transmit(&huart1, (uint8_t *)buffer1, strlen(buffer1), HAL_MAX_DELAY);
}
3.tx_byte_pool_delete
UINT tx_byte_pool_delete(TX_BYTE_POOL *pool_ptr)
- 第 1 个参数 pool_ptr 是内存字节池控制块指针。
- 返回值:
- TX_SUCCESS(0x00)成功删除字节池。
- TX_POOL_ERROR:(0x02)无效的内存池指针。
- TX_CALLER_ERROR:(0x13)无效的服务调用者。
和互斥锁类似,删除内存字节池后,字节池挂起的所有线程都将恢复,并接收TX_DELETED返回状态。
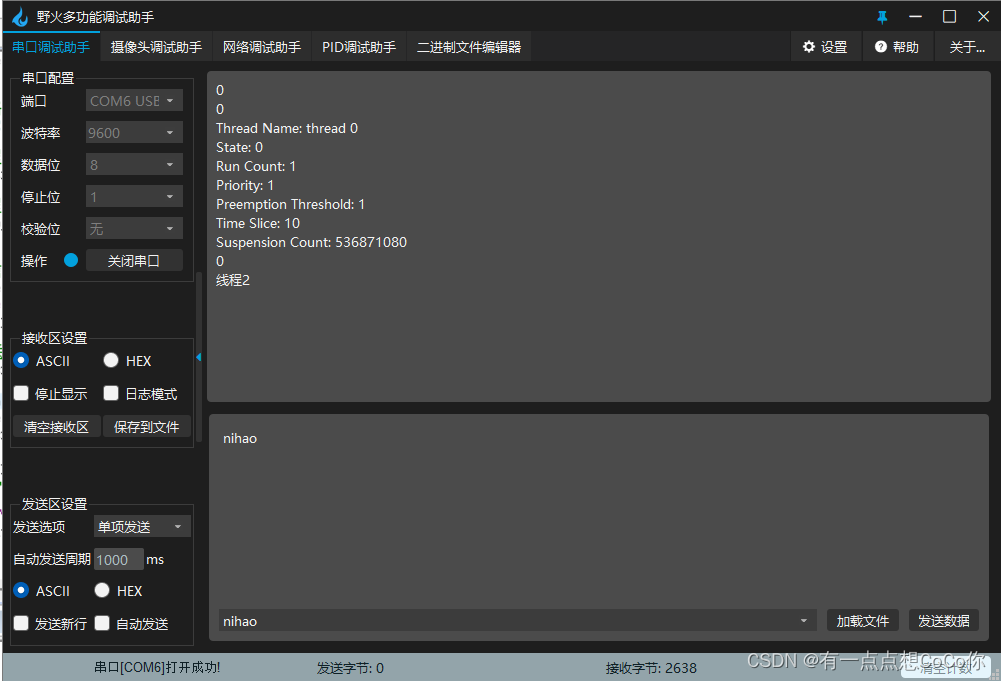
示例代码展示了如何删除之前创建好的内存字节池,根据串口打印结果显示,删除成功。
void thread_0_entry(ULONG thread_input)
//线程,串口发送数据
{
TX_THREAD *thread_ptr;
CHAR *name_ptr;
UINT state;
ULONG run_count;
UINT priority;
UINT preemption_threshold;
ULONG time_slice;
UINT suspension_count;
TX_THREAD *next_thread;
TX_THREAD *previous_thread;
// 缓冲区用于格式化输出字符串
char buffer1[256];
// 获取当前线程的指针
thread_ptr = tx_thread_identify();
// 获取当前线程信息
tx_thread_info_get(thread_ptr, &name_ptr, &state, &run_count, &priority, &preemption_threshold,
&time_slice, &next_thread, &previous_thread);
// 格式化线程信息为字符串
snprintf(buffer1, sizeof(buffer1),
"Thread Name: %s\nState: %u\nRun Count: %lu\nPriority: %u\nPreemption Threshold: %u\nTime Slice: %lu\nSuspension Count: %u\n",
name_ptr, state, run_count, priority, preemption_threshold, time_slice, suspension_count);
// 通过UART发送线程信息
HAL_UART_Transmit(&huart1, (uint8_t *)buffer1, strlen(buffer1), HAL_MAX_DELAY);
UINT aa= tx_byte_pool_delete(&byte_POOL_0);
snprintf(buffer1, sizeof(buffer1),"%u\n" ,aa);
HAL_UART_Transmit(&huart1, (uint8_t *)buffer1, strlen(buffer1), HAL_MAX_DELAY);
}
4.tx_byte_pool_info_get
关于这部分的展示,已经在内存分配函数中展示过了。
UINT tx_byte_pool_info_get(TX_BYTE_POOL *pool_ptr,
CHAR **name,
ULONG *available_bytes,
ULONG *fragments,
TX_THREAD **first_suspended,
ULONG *suspended_count,
TX_BYTE_POOL **next_pool)
- 第 1 个参数 pool_ptr 是内存字节池控制块指针。
- 第 2 个参数 name 是字节池名字符串,获取后存储的指针。
- 第 3 个参数 available_bytes 是可用字节数,获取后存储的指针。
- 第 4 个参数 fragments 是碎片数量,获取后存储的指针。
- 第 5 个参数 first_suspended 是等待该字节池的第一个线程TCB指针,获取后存储的指针。
- 第 6 个参数 suspended_count 是等待该字节池的线程数,获取后存储的指针。
- 第 7 个参数 next_pool 是字节池列表的下一个字节池控制块指针,获取后存储的指针。
返回值:
- TX_SUCCESS(0x00)成功获取字节池信息。
- TX_POOL_ERROR:(0x02)无效的内存池指针。
5.tx_byte_pool_prioritize
UINT tx_byte_pool_prioritize(TX_BYTE_POOL *pool_ptr)
字节池挂起列表的最高优先级线程置队头
返回值:
- TX_SUCCESS(0x00)成功或挂起列表为空。
TX_POOL_ERROR:(0x02)无效的内存池指针。
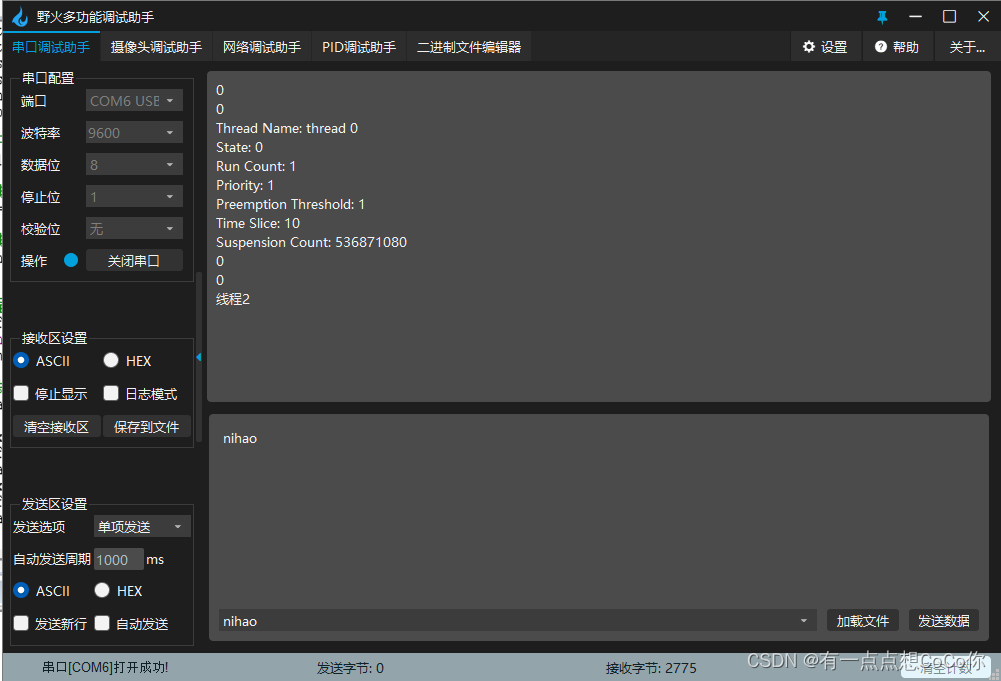
示例代码在线程0中调用了函数tx_byte_pool_prioritize,根据串口打印结果,可以看到,函数调用成功。
void thread_0_entry(ULONG thread_input)
//线程,串口发送数据
{
TX_THREAD *thread_ptr;
CHAR *name_ptr;
UINT state;
ULONG run_count;
UINT priority;
UINT preemption_threshold;
ULONG time_slice;
UINT suspension_count;
TX_THREAD *next_thread;
TX_THREAD *previous_thread;
// 缓冲区用于格式化输出字符串
char buffer1[256];
// 获取当前线程的指针
thread_ptr = tx_thread_identify();
// 获取当前线程信息
tx_thread_info_get(thread_ptr, &name_ptr, &state, &run_count, &priority, &preemption_threshold,
&time_slice, &next_thread, &previous_thread);
// 格式化线程信息为字符串
snprintf(buffer1, sizeof(buffer1),
"Thread Name: %s\nState: %u\nRun Count: %lu\nPriority: %u\nPreemption Threshold: %u\nTime Slice: %lu\nSuspension Count: %u\n",
name_ptr, state, run_count, priority, preemption_threshold, time_slice, suspension_count);
// 通过UART发送线程信息
HAL_UART_Transmit(&huart1, (uint8_t *)buffer1, strlen(buffer1), HAL_MAX_DELAY);
UINT aa= tx_byte_pool_prioritize(&byte_POOL_0);
snprintf(buffer1, sizeof(buffer1),"%u\n" ,aa);
HAL_UART_Transmit(&huart1, (uint8_t *)buffer1, strlen(buffer1), HAL_MAX_DELAY);
}
6.tx_byte_release
UINT tx_byte_release(VOID *memory_ptr)
字节池释放空间
- 第 1 个参数 memory_ptr 是要释放的空间首地址。
返回值:
- TX_SUCCESS(0x00)成功释放。
- TX_PTR_ERROR:(0x03)无效的内存区域指针。
- TX_CALLER_ERROR:(0x13)无效的服务调用者。
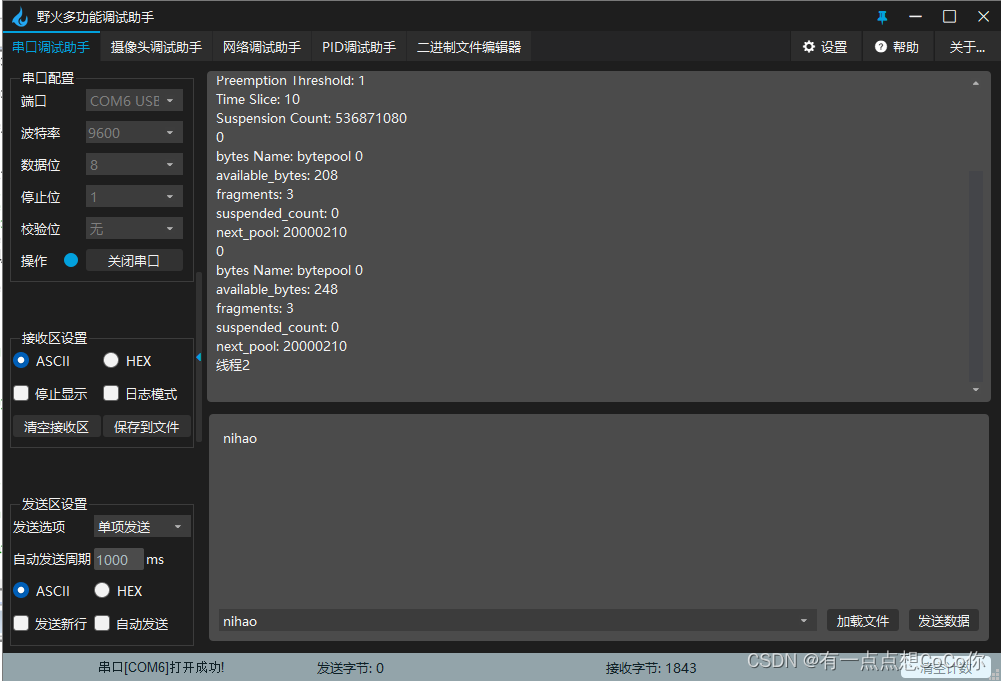
下列代码先实现了内存分配,然后打印内存池信息,再内存释放,再次打印内存池信息,可以看到两次内存池的内存大小产生了变化。之所以两次内存大小之差是30而不是32,是因为在实际应用中,系统可能会在分配内存时,额外地使用一些字节来保存内部的控制信息。这些额外的字节通常用于维护内存池和内存块之间的关系,以及记录已分配和未分配的内存块等信息。
tx_byte_release将先前分配的内存区域释放,挂起列表按顺序开始分配,直至内存池空间不足或挂起列表为空。
void thread_0_entry(ULONG thread_input)
//线程,串口发送数据
{
TX_THREAD *thread_ptr;
CHAR *name_ptr;
UINT state;
ULONG run_count;
UINT priority;
UINT preemption_threshold;
ULONG time_slice;
UINT suspension_count;
TX_THREAD *next_thread;
TX_THREAD *previous_thread;
VOID *memory_ptr;
char *name;
ULONG available_bytes;
ULONG fragments;
TX_THREAD *first_suspended;
ULONG suspended_count;
TX_BYTE_POOL *next_pool;
// 缓冲区用于格式化输出字符串
char buffer1[256];
// 获取当前线程的指针
thread_ptr = tx_thread_identify();
// 获取当前线程信息
tx_thread_info_get(thread_ptr, &name_ptr, &state, &run_count, &priority, &preemption_threshold,
&time_slice, &next_thread, &previous_thread);
// 格式化线程信息为字符串
snprintf(buffer1, sizeof(buffer1),
"Thread Name: %s\nState: %u\nRun Count: %lu\nPriority: %u\nPreemption Threshold: %u\nTime Slice: %lu\nSuspension Count: %u\n",
name_ptr, state, run_count, priority, preemption_threshold, time_slice, suspension_count);
// 通过UART发送线程信息
HAL_UART_Transmit(&huart1, (uint8_t *)buffer1, strlen(buffer1), HAL_MAX_DELAY);
UINT byteask= tx_byte_allocate(&byte_POOL_0,&memory_ptr,32,TX_NO_WAIT);
snprintf(buffer1, sizeof(buffer1), "%u\n",byteask);
HAL_UART_Transmit(&huart1,(uint8_t *)buffer1,strlen(buffer1),HAL_MAX_DELAY);
tx_byte_pool_info_get(&byte_POOL_0,&name,&available_bytes,&fragments,&first_suspended,&suspended_count,&next_pool);
snprintf(buffer1, sizeof(buffer1),
"bytes Name: %s\navailable_bytes: %lu\nfragments: %lu\nsuspended_count: %lu\nnext_pool: %p\n",
name,available_bytes,fragments,suspended_count,next_pool);
// 通过UART发送线程信息
HAL_UART_Transmit(&huart1, (uint8_t *)buffer1, strlen(buffer1), HAL_MAX_DELAY);
UINT byterelease= tx_byte_release(memory_ptr);
snprintf(buffer1, sizeof(buffer1), "%u\n",byterelease);
HAL_UART_Transmit(&huart1,(uint8_t *)buffer1,strlen(buffer1),HAL_MAX_DELAY);
tx_byte_pool_info_get(&byte_POOL_0,&name,&available_bytes,&fragments,&first_suspended,&suspended_count,&next_pool);
snprintf(buffer1, sizeof(buffer1),
"bytes Name: %s\navailable_bytes: %lu\nfragments: %lu\nsuspended_count: %lu\nnext_pool: %p\n",
name,available_bytes,fragments,suspended_count,next_pool);
// 通过UART发送线程信息
HAL_UART_Transmit(&huart1, (uint8_t *)buffer1, strlen(buffer1), HAL_MAX_DELAY);
}
内存块池:
1.tx_block_pool_create
TX_BLOCK_POOL my_pool;//先定义一个内存块池
UINT tx_block_pool_create( TX_BLOCK_POOL *pool_ptr,
CHAR *name_ptr,
ULONG block_size,
VOID *pool_start,
ULONG pool_size)
创建内存字节池:
- 第 1 个参数 pool_ptr 是内存块池控制块指针。
- 第 2 个参数 name_ptr 是内存块池名。
- 第 3 个参数 block_size 是单个内存块的大小。
- 第 4 个参数 pool_start 是内存块池的首地址。
- 第 5 个参数 pool_size 是内存块池的总大小。
返回值:
- TX_SUCCESS(0x00)成功创建内存块池。
- TX_POOL_ERROR:(0x02)无效的内存块池指针。要么指针是NULL,要么池已经创建。
- TX_PTR_ERROR: (0x03)无效的池起始地址。
- TX_SIZE_ERROR: (0x05)池大小无效。
- TX_CALLER_ERROR:(0x13)无效的服务调用者。
示例代码展示如何创建一个内存块池,内存块池的起始指针应该是一个独立的、未被其他内存池使用的地址。串口打印显示创建成功。
VOID tx_application_define(void *first_unused_memory)
{
UINT aa= tx_byte_pool_create(&byte_POOL_0,"bytepool 0",first_unused_memory,256);
char buffer[256];
snprintf(buffer,sizeof(buffer),"%u\n",aa);
HAL_UART_Transmit(&huart1, (uint8_t *)buffer, strlen(buffer), HAL_MAX_DELAY);
UINT bb= tx_block_pool_create(&my_pool,"blockpool 0",32,(UCHAR*)first_unused_memory+256,512);
snprintf(buffer,sizeof(buffer),"%u\n",bb);
HAL_UART_Transmit(&huart1, (uint8_t *)buffer, strlen(buffer), HAL_MAX_DELAY);
tx_thread_create(&thread_0, "thread 0", thread_0_entry, 0,
thread_0_stack, DEMO_STACK_SIZE,
1, 1, 10, TX_AUTO_START);
tx_thread_create(&thread_1, "Thread 1", thread_1_entry, 0,
thread_1_stack, DEMO_STACK_SIZE,
2, 2, TX_NO_TIME_SLICE, TX_AUTO_START);
}
2.tx_block_allocate
UINT tx_block_allocate(TX_BLOCK_POOL *pool_ptr,
VOID **block_ptr,
ULONG wait_option)
分配内存块:
第 1 个参数 pool_ptr 是内存块池控制块指针。
第 2 个参数 block_ptr 是分配得到的内存块首地址的指针,需要提前定义。
第 3 个参数 wait_option 是内存块池分配等待选项:
TX_NO_WAIT:不等待,直接返回结果。
TX_WAIT_FOREVER:一直等待直到获取内存块。
timeout value:设置等待时间(时钟脉冲)。
返回值:
TX_SUCCESS(0x00)成功分配。
TX_DELETED: (0x01)线程挂起时内存块池被删除。
TX_NO_MEMORY: (0x10) 无法在指定的等待时间内分配内存块。
TX_WAIT_ABORTED: (0x1A)挂起被另一个线程、定时器或ISR中止。
TX_POOL_ERROR:(0x02)无效的内存块池指针。
TX_PTR_ERROR:(0x03)无效的分配指针。
TX_WAIT_ERROR: (0x04)在非线程调用时指定了TX_NO_WAIT以外的等待选项。
在线程0中先分配内存块,再打印内存块池信息,再释放内存块,打印内存块池信息,根据串口打印结果显示,内存块分配成功,内存块释放成功。
void thread_0_entry(ULONG thread_input)
//线程,串口发送数据
{
TX_THREAD *thread_ptr;
CHAR *name_ptr;
UINT state;
ULONG run_count;
UINT priority;
UINT preemption_threshold;
ULONG time_slice;
UINT suspension_count;
TX_THREAD *next_thread;
TX_THREAD *previous_thread;
VOID *memory_ptr;
char *name;
ULONG available_blocks;
ULONG total_blocks;
TX_THREAD *first_suspended;
ULONG suspended_count;
TX_BLOCK_POOL *next_pool;
// 缓冲区用于格式化输出字符串
char buffer1[256];
// 获取当前线程的指针
thread_ptr = tx_thread_identify();
// 获取当前线程信息
tx_thread_info_get(thread_ptr, &name_ptr, &state, &run_count, &priority, &preemption_threshold,
&time_slice, &next_thread, &previous_thread);
// 格式化线程信息为字符串
snprintf(buffer1, sizeof(buffer1),
"Thread Name: %s\nState: %u\nRun Count: %lu\nPriority: %u\nPreemption Threshold: %u\nTime Slice: %lu\nSuspension Count: %u\n",
name_ptr, state, run_count, priority, preemption_threshold, time_slice, suspension_count);
// 通过UART发送线程信息
HAL_UART_Transmit(&huart1, (uint8_t *)buffer1, strlen(buffer1), HAL_MAX_DELAY);
UINT byteask= tx_block_allocate(&my_pool,&memory_ptr,TX_NO_WAIT);
snprintf(buffer1, sizeof(buffer1), "%u\n",byteask);
HAL_UART_Transmit(&huart1,(uint8_t *)buffer1,strlen(buffer1),HAL_MAX_DELAY);
tx_block_pool_info_get(&my_pool,&name,&available_blocks,&total_blocks,&first_suspended,&suspended_count,&next_pool);
snprintf(buffer1, sizeof(buffer1),
"bytes Name: %s\navailable_bytes: %lu\nfragments: %lu\nsuspended_count: %lu\nnext_pool: %p\n",
name,available_blocks,total_blocks,suspended_count,next_pool);
// 通过UART发送线程信息
HAL_UART_Transmit(&huart1, (uint8_t *)buffer1, strlen(buffer1), HAL_MAX_DELAY);
UINT byterelease= tx_block_release(memory_ptr);
snprintf(buffer1, sizeof(buffer1), "%u\n",byterelease);
HAL_UART_Transmit(&huart1,(uint8_t *)buffer1,strlen(buffer1),HAL_MAX_DELAY);
tx_block_pool_info_get(&my_pool,&name,&available_blocks,&total_blocks,&first_suspended,&suspended_count,&next_pool);
snprintf(buffer1, sizeof(buffer1),
"bytes Name: %s\navailable_bytes: %lu\nfragments: %lu\nsuspended_count: %lu\nnext_pool: %p\n",
name,available_blocks,total_blocks,suspended_count,next_pool);
// 通过UART发送线程信息
HAL_UART_Transmit(&huart1, (uint8_t *)buffer1, strlen(buffer1), HAL_MAX_DELAY);
}
3.tx_block_pool_info_get
UINT tx_block_pool_info_get( TX_BLOCK_POOL *pool_ptr,
CHAR **name,
ULONG *available_blocks,
ULONG *total_blocks,
TX_THREAD **first_suspended,
ULONG *suspended_count,
TX_BLOCK_POOL **next_pool)
获取内存块池信息:
- 第 1 个参数 pool_ptr 是内存块池控制块指针。
- 第 2 个参数 name 是内存块池名字符串,获取后存储的指针。
- 第 3 个参数 available_blocks 是可用内存块数,获取后存储的指针。
- 第 4 个参数 total_blocks 是内存块总数,获取后存储的指针。
- 第 5 个参数 first_suspended 是等待该内存块池的第一个线程TCB指针,获取后存储的指针。
- 第 6 个参数 suspended_count 是等待该内存块池的线程数,获取后存储的指针。
- 第 7 个参数 next_pool 是内存块池列表的下一个内存块池控制块指针,获取后存储的指针。
返回值:
- TX_SUCCESS(0x00)成功获取内存块池信息。
- TX_POOL_ERROR:(0x02)无效的内存块池指针。
相关示例代码再内存块分配函数中已经涉及
4.tx_block_release
UINT tx_block_release(VOID *memory_ptr)
内存块释放:
- 第 1 个参数 memory_ptr 是要释放内存块首地址。
返回值:
- TX_SUCCESS(0x00)成功释放。
- TX_PTR_ERROR(0x03)无效的内存块指针。
相关示例代码再内存块分配函数中已经涉及
5. tx_block_pool_delete
UINT tx_block_pool_delete(TX_BLOCK_POOL *pool_ptr)
删除内存块池:
- 第 1 个参数 pool_ptr 是内存块池控制块指针。
返回值:
- TX_SUCCESS(0x00)成功删除内存块池。
- TX_POOL_ERROR:(0x02)无效的内存块池指针。
- TX_CALLER_ERROR:(0x13)无效的服务调用者。
删除之前创建好的内存块池。根据串口打印的结果可以看到删除成功。
void thread_0_entry(ULONG thread_input)
//线程,串口发送数据
{
TX_THREAD *thread_ptr;
CHAR *name_ptr;
UINT state;
ULONG run_count;
UINT priority;
UINT preemption_threshold;
ULONG time_slice;
UINT suspension_count;
TX_THREAD *next_thread;
TX_THREAD *previous_thread;
VOID *memory_ptr;
char *name;
ULONG available_blocks;
ULONG total_blocks;
TX_THREAD *first_suspended;
ULONG suspended_count;
TX_BLOCK_POOL *next_pool;
// 缓冲区用于格式化输出字符串
char buffer1[256];
// 获取当前线程的指针
thread_ptr = tx_thread_identify();
// 获取当前线程信息
tx_thread_info_get(thread_ptr, &name_ptr, &state, &run_count, &priority, &preemption_threshold,
&time_slice, &next_thread, &previous_thread);
// 格式化线程信息为字符串
snprintf(buffer1, sizeof(buffer1),
"Thread Name: %s\nState: %u\nRun Count: %lu\nPriority: %u\nPreemption Threshold: %u\nTime Slice: %lu\nSuspension Count: %u\n",
name_ptr, state, run_count, priority, preemption_threshold, time_slice, suspension_count);
// 通过UART发送线程信息
HAL_UART_Transmit(&huart1, (uint8_t *)buffer1, strlen(buffer1), HAL_MAX_DELAY);
UINT aa= tx_block_pool_delete(&my_pool);
snprintf(buffer1, sizeof(buffer1),"%u\n" ,aa);
HAL_UART_Transmit(&huart1, (uint8_t *)buffer1, strlen(buffer1), HAL_MAX_DELAY);
}
6.tx_block_pool_prioritize
UINT tx_block_pool_prioritize(TX_BLOCK_POOL *pool_ptr)
内存块池挂起列表的最高优先级线程置队头:
- 第 1 个参数 pool_ptr 是内存块池控制块指针。
返回值:
- TX_SUCCESS(0x00)成功或挂起列表为空。
- TX_POOL_ERROR:(0x02)无效的内存块池指针。
示例代码在线程0中调用了函数tx_block_pool_prioritize,根据串口打印结果,可以看到,函数调用成功。
void thread_0_entry(ULONG thread_input)
//线程,串口发送数据
{
TX_THREAD *thread_ptr;
CHAR *name_ptr;
UINT state;
ULONG run_count;
UINT priority;
UINT preemption_threshold;
ULONG time_slice;
UINT suspension_count;
TX_THREAD *next_thread;
TX_THREAD *previous_thread;
// 缓冲区用于格式化输出字符串
char buffer1[256];
// 获取当前线程的指针
thread_ptr = tx_thread_identify();
// 获取当前线程信息
tx_thread_info_get(thread_ptr, &name_ptr, &state, &run_count, &priority, &preemption_threshold,
&time_slice, &next_thread, &previous_thread);
// 格式化线程信息为字符串
snprintf(buffer1, sizeof(buffer1),
"Thread Name: %s\nState: %u\nRun Count: %lu\nPriority: %u\nPreemption Threshold: %u\nTime Slice: %lu\nSuspension Count: %u\n",
name_ptr, state, run_count, priority, preemption_threshold, time_slice, suspension_count);
// 通过UART发送线程信息
HAL_UART_Transmit(&huart1, (uint8_t *)buffer1, strlen(buffer1), HAL_MAX_DELAY);
UINT aa= tx_block_pool_prioritize(&my_pool);
snprintf(buffer1, sizeof(buffer1),"%u\n" ,aa);
HAL_UART_Transmit(&huart1, (uint8_t *)buffer1, strlen(buffer1), HAL_MAX_DELAY);
UINT bb= tx_block_pool_delete(&my_pool);
snprintf(buffer1, sizeof(buffer1),"%u\n" ,bb);
HAL_UART_Transmit(&huart1, (uint8_t *)buffer1, strlen(buffer1), HAL_MAX_DELAY);
}















 397
397











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









