







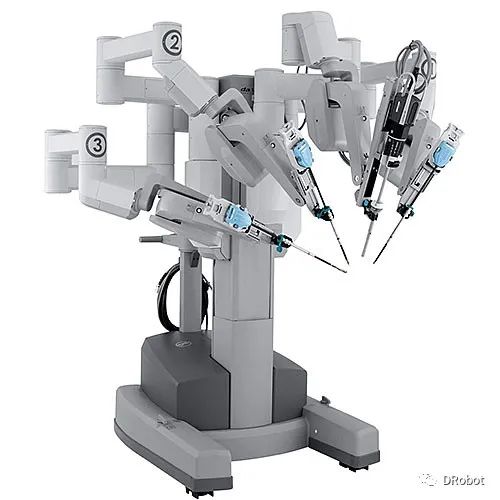
达芬奇机器人是一种为微创手术而设计的手术机器人,它配备了比人手活动范围更大的手术工具、高清3D视觉系统的外科医生控制台。并且有四个手臂,通过配置的外科手术器械和摄像头,医生可以轻松通过控制台远程控制。
创造者: Intuitive Surgical
国家:美国
年份:1999
类型:医疗
达芬奇机器人历史
达芬奇系列手术机器人在过去十多年里一直在进行人体微创手术,并且一直在努力使其机器人在以绝对最小的切口切开的情况下更好地进行手术。其中,第一套达·芬奇系统于1999年投入市场。2003年,又增加了第四个仪器臂。2006年,达·芬奇S版本问世,为外科医生提供了高清视觉。最新的达芬奇Si模型于2009年推出。


达芬奇机器人的钳子特写
每一次新高度都是一个新起点
更宏伟的事业永远在前方!



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











