







 本文介绍了IEEE802.11n物理层帧的基本格式,包括HT-LTF、VHT-LTF和HE-LTF的数量取决于Space Stream。重点讲述了IEEE802.11n的特点,如支持40M带宽、MIMO 4*4、64-QAM编码和短保护间隔(Short GI),并提供了数据速率表。
本文介绍了IEEE802.11n物理层帧的基本格式,包括HT-LTF、VHT-LTF和HE-LTF的数量取决于Space Stream。重点讲述了IEEE802.11n的特点,如支持40M带宽、MIMO 4*4、64-QAM编码和短保护间隔(Short GI),并提供了数据速率表。
目录
IEEE802.11 物理层帧的基本格式
IEEE802.11物理帧格式经过了漫长的演变至今,有许多为了扩展功能支持的帧格式。简单对IEEE802.11物理层发展做了一个梳理,如下图1所示。需要注意的是,HT-LTF、VHT-LTF、HE-LTF的个数由使用的Space Stream(时空流)决定,当为SISO格式,个数都为1。
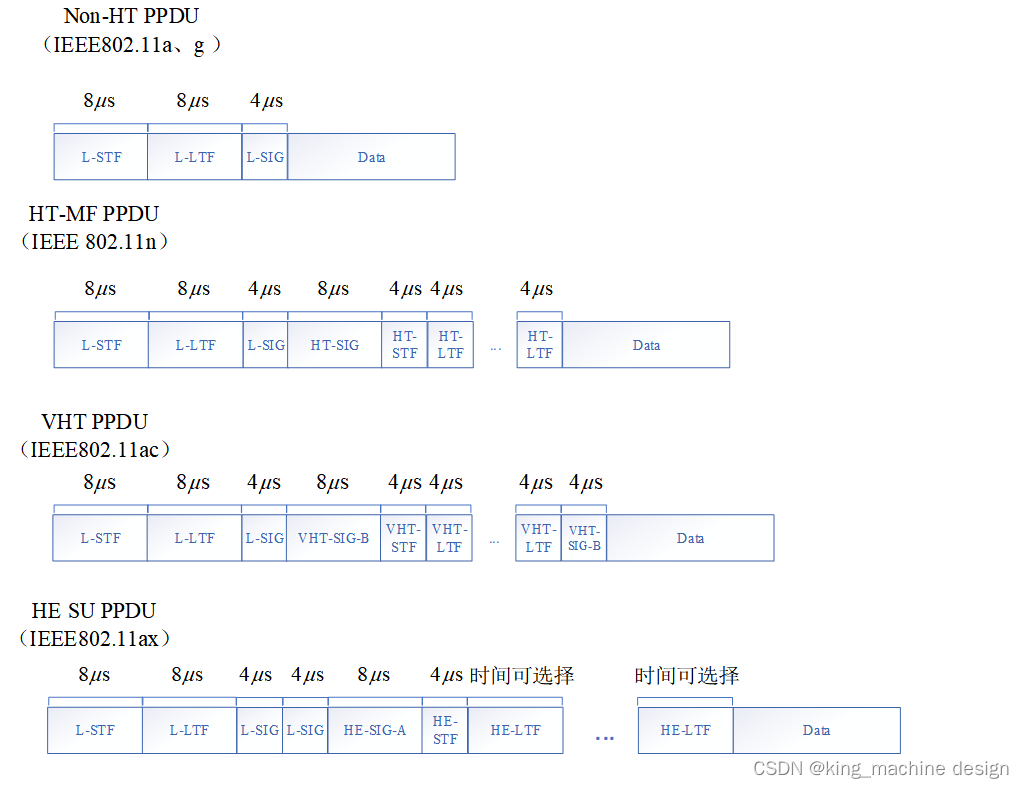
图1 IEEE802.11 物理层帧格式
IEEE802.11n的特点
IEEE802.11n又称HT,对于本文研究的IEEE802.11n MF 物理层帧格式来说,对比之前的a/g新增的亮点就是加入了对于40M带宽、MIMO 4*4、相同带宽下新增的数据子载波和短保护间隔(Short GI)的支持。由于40M的基带处理与20M类似,这里还是拿20M举例。同样以图1为基础阐述,IEEE802.11n MF为了兼容性, L-STF、L-LTF、L-SIG 与之前定义一样,并且新增一个HT-SIG字段如图 2。
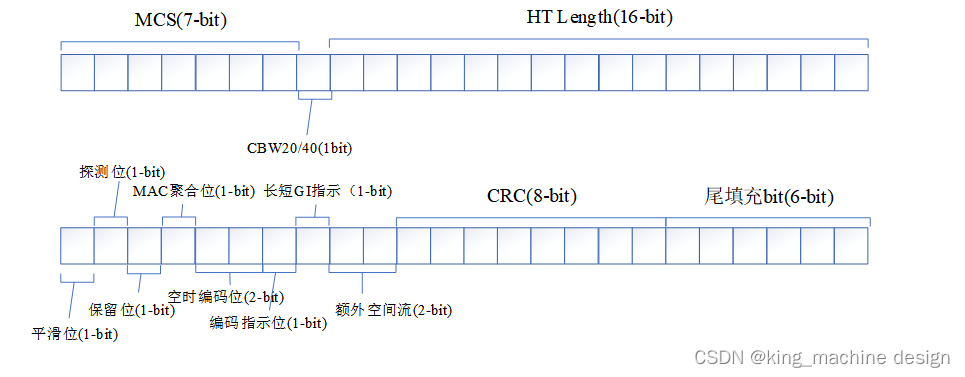
图2 HT-SIG字段详解
HT-SIG 包含48 bit,与L-SIG类似方式进行编码,并且为了让设备检查出 HT-SIG以区分IEEE802.11n和IEEE802.11a/g,HT-SIG部分的BPSK 星座应相对于 L-SIG 旋转 90°。
同带宽IEEE802.11n的物理层提升主要体现:(1)在调制和编码方案 (Modulation and Coding Scheme、MCS),新增了64-QAM编码率R=5/6的编码方案。(2)新增短保护间隔(GI)支持。(3)新增4个数据子载波。新改变得到对应的数据传输速率表如下:
表1 IEEE802.11n 20M SISO MF数据速率表
| MCS |
子载波调制方式 |
码率 |
NBPSC | NSD | NSP | NCBPS | NDBPS | ||
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 1459
1459

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











