







 本文探讨了在快速发展的科技背景下,无人驾驶技术中的智能小车设计,着重介绍了基于C语言和STC89C52单片机的硬件与软件开发,包括电源、电机驱动、传感器(红外线和超声波)以及避障功能的实现。通过实验验证,展示了智能小车的综合性能。
本文探讨了在快速发展的科技背景下,无人驾驶技术中的智能小车设计,着重介绍了基于C语言和STC89C52单片机的硬件与软件开发,包括电源、电机驱动、传感器(红外线和超声波)以及避障功能的实现。通过实验验证,展示了智能小车的综合性能。
项目介绍
技术:C语言、单片机等
摘要:近年来随着我国社会经济和科学技术地飞速发展,人工智能、无人驾驶等新兴技术成为当前研究热点。无人驾驶汽车,即轮式移动机器人,作为前沿的高新技术,主要包含传感器技术、自动控制理论、人工智能、电子技术、计算机科学等学科,是一个涉及多学科的综合系统。
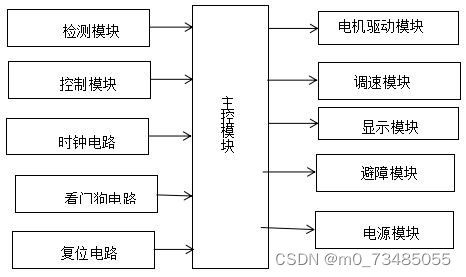
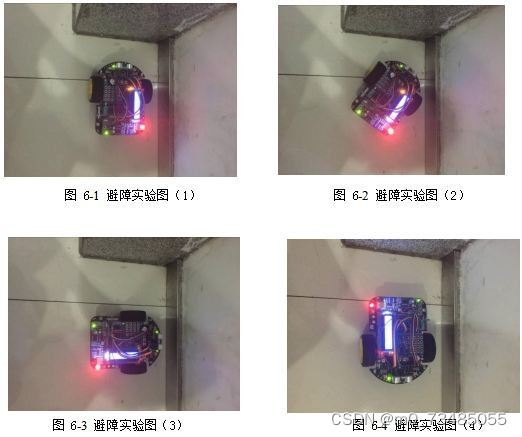
本文的主要研究是完成基于STC89C52单片机的智能小车(轮式移动机器人)的设计与实现。工作包括其硬件和软件两部分,硬件电源模块、电机驱动模块、红外线传感模块等等,通过软件编程实现智能小车的前进、后退、左转、右转等,并在智能小车的行进过程中很好地实现了避障功能。通过室内进行实验,达到预期的实验效果。关键词:单片机;智能小车;避障功能
效果图
目录:
第一章 绪论 1
1.1课题的背景及意义 1
1.1.1课题的背景 1
1.1.2课题的意义 2
1.2 国内外研究现状 3
1.2.1国外研究现状 3
1.2.2国内研究现状 4
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 1320
1320

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









