







1.机器人的状态描述
一般而言,我们假定我们假定机器人的各个关节是一个刚体,在每个关节上有两种状态:移动和转动
在平面上:对于一个刚体而言,它有X方向和Y方向的移动自由度,还有一个转动自由度,共三个自由度EOFs
在空间中:有X、Y、Z方向的移动自由度,还有绕X/Y/Z的转动自由度,共六个自由度
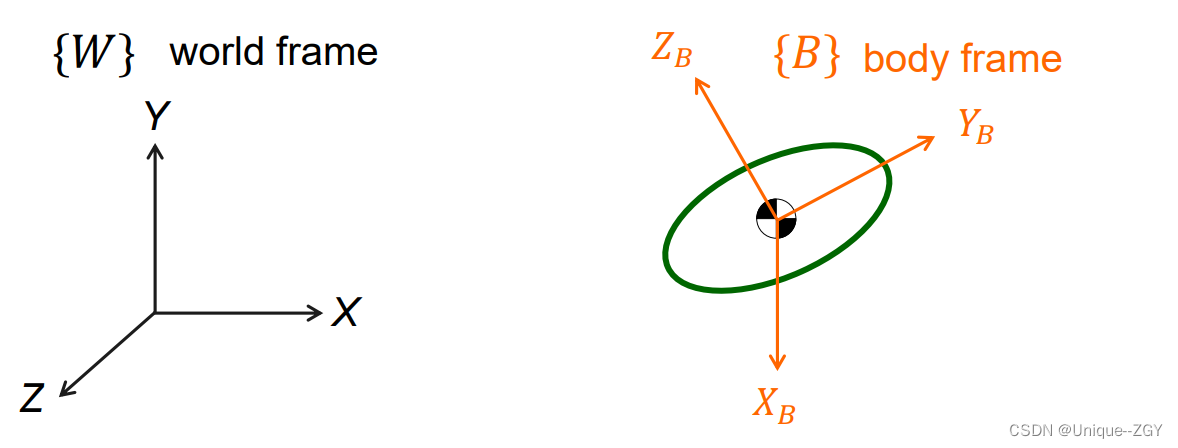
描述机器人姿态:
相对于世界坐标系world frame,刚体body frame的移动与转动;移动通过原点的偏移,转动通过刚体的三坐标单位长度在世界坐标系的投影,一般通过矩阵来描述
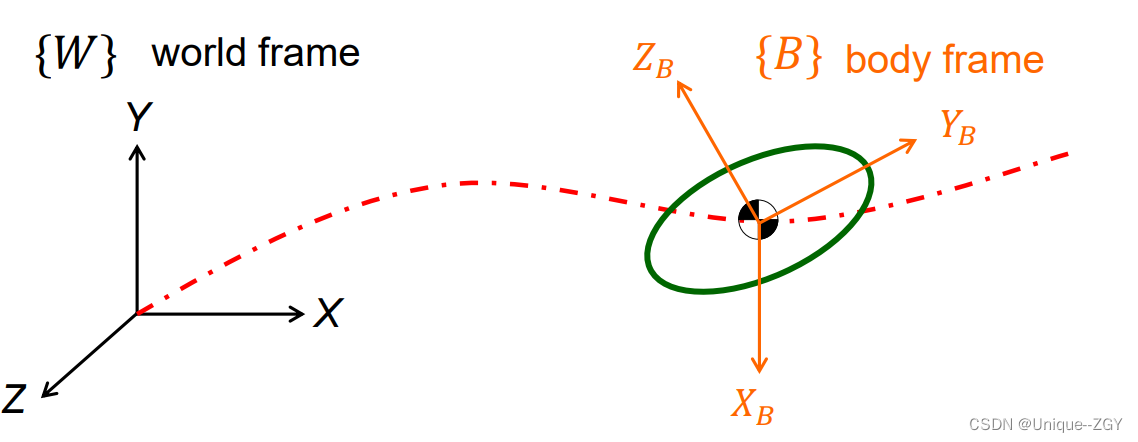
通过每个DOF的微分,我们可以得到速度、加速度等状态信息用以来描述机器人位姿
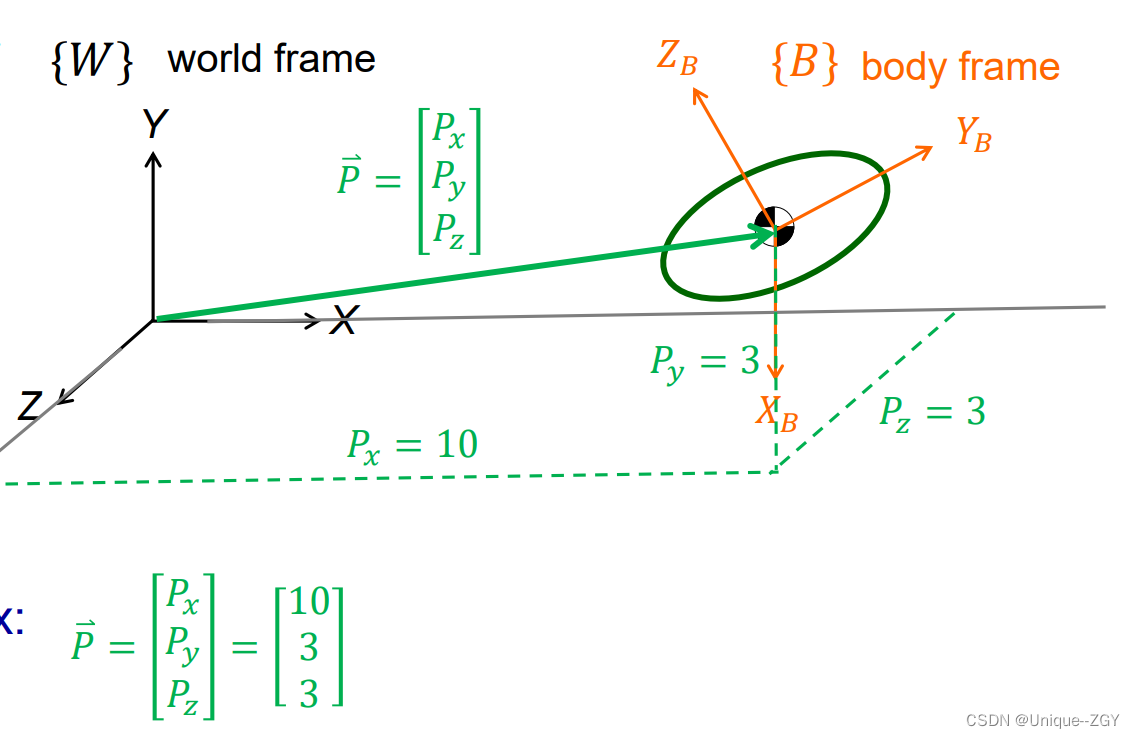
1.1 移动的描述
如下图所示:
以向量(vector)𝑃 来描述{𝐵}的原点相对于{𝐴}的状态
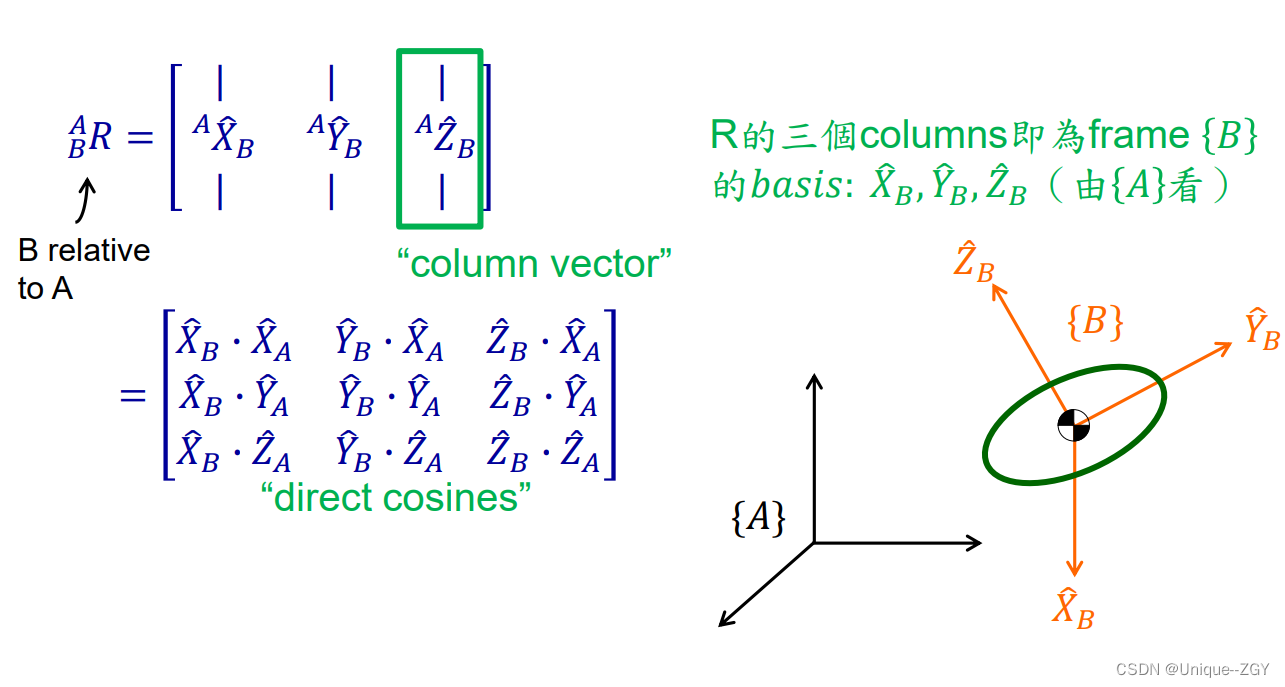
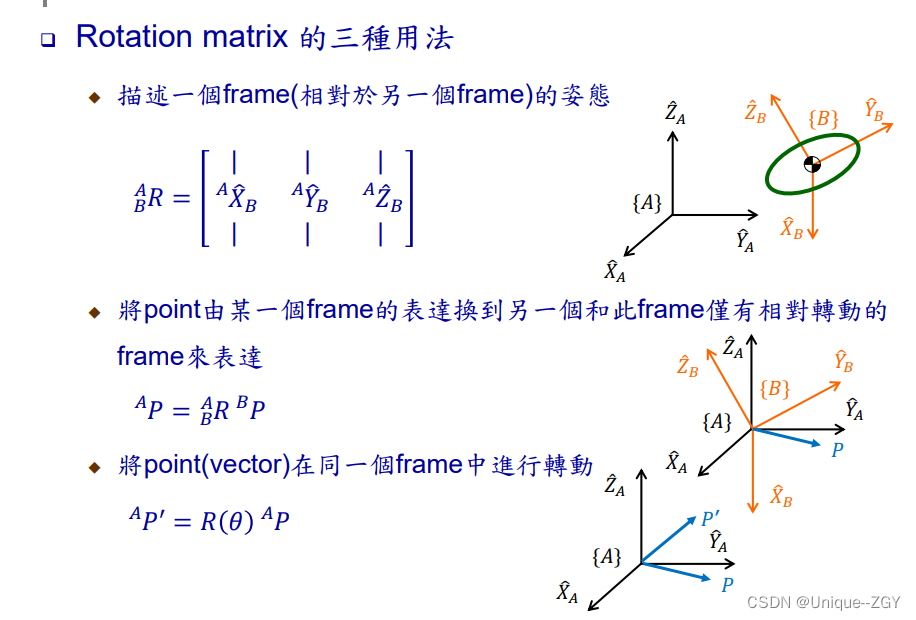
1.2 转动的描述
如下图所示:转动通过frame B的单位坐标向量在frameA的投影来描述
1.3 旋转矩阵的特性
- 旋转矩阵是正交矩阵
- 坐标系B相对于坐标系A的旋转矩阵是A对B的旋转矩阵的转置
…














 4668
4668











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









