










触觉传感技术作为当今一个热门的研究,出现了多种传感器,有着许多的传感机制。在这里,笔者就以自己目前接触到的一些触觉传感器做一个简单的分析。
就我目前接触到的触觉传感器种类来看,传感器的传感机制有:
无需供电型:摩擦电式、压电式、磁场式、电位式;
供电型:变阻式、电容式、电感式、光导式、热导式。
目录
这里我们主要挑几个进行叙述,剩余传感机理读者可自行搜索!!
各传感器的大概原理
摩擦电式
我们都知道,当两种不同材料接触到一起时,由于带电特性的不同,两种材料在分离时会得到等量的异种电荷。例如一个易于带负电的材料接触或者摩擦一个易于带正电的材料,那么接触时会发生电荷(电子)的转移,负电荷倾向于转移到易于带负电的材料,同样正电荷就留在了易于带正电的材料接触表面,他们的电荷量是相同的(细节原理请参考书籍《摩擦电纳米发电机》)。
正所谓,用丝绸摩擦过的玻璃棒带正电荷,用毛皮摩擦过的橡胶棒带负电荷也是这个道理。
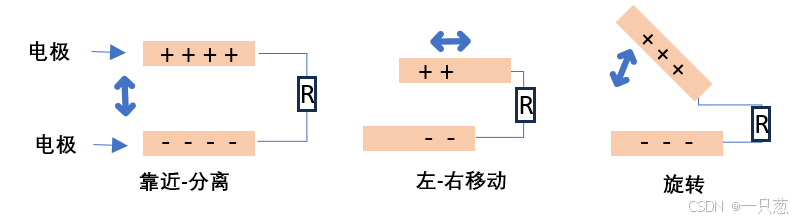
那么,摩擦电传感器是怎么来的呢,这很简单,只需要在两种接触材料的一个或者两个的背面放上电极,这样两种材料接触分离时所产生的电荷转移就会使得电极产生感应电荷,我们使用电阻等就可以采集到感应信号。另外电极也可以作为摩擦电材料来使用。如下图展示了一些工作原理:
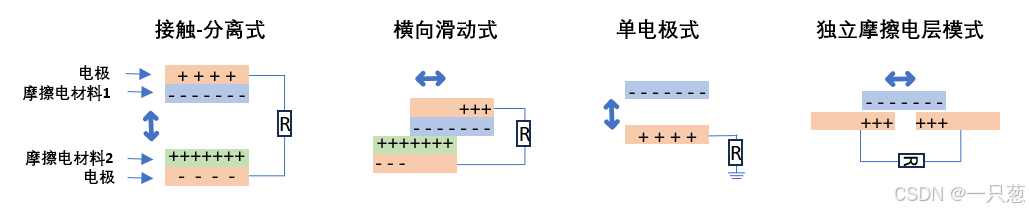
接触-分离式:两种材料的靠近与分离使得电极感应电荷转移,如靠近时,电子由下电极转移至上电极;分离时,电子由上电极转移至下电极。
横向滑动式:也是感应电荷在电极中的转移,如材料1向右滑动时,电子由上电极向下电极转移;向左滑动时,电子由下电极向上电极转移。
单电极式:电极既充当摩擦电材料,又作为电极,会有电极由于接触产生的材料间的电荷转移的信号,还有感应信号。
独立摩擦电层式:材料1的左右滑动,导致左右电极与材料的接触面积不同,进而产生感应电荷。
另外,有许多种方法可以增大摩擦电信号,如较快的接触分离速度,采用两种带电能力截然相反并更显著的材料,接触更加充分,黏附接触等。
压电式
压电传感器主要由两端电极以及压电晶体组成,如下图所示:
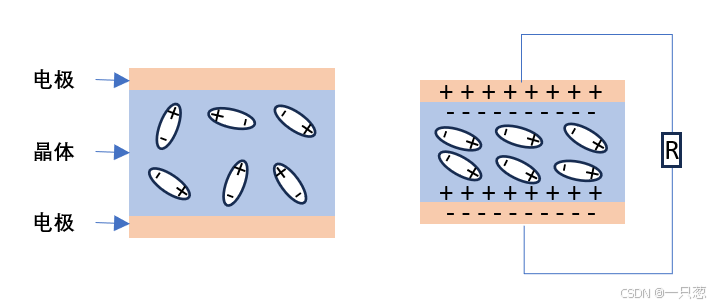
当施加压力时,由于压电晶体的极化现象,它的两个相对表面上出现正负相反的电荷。当外力去掉后,它又会恢复到不带电的状态。因此,我们在压电晶体的两端添加电极,由于极化现象的存在导致电极出现感应电荷,电荷流过电阻的信号可被采集以分析。不同的受力将产生不同的压电信号(大小或方向),这样就达到了力感知的目的。
磁场式
我们都知道磁能生电,也就是因为这一特性,磁场式的传感器便被研究。如下图所以为一种应用:
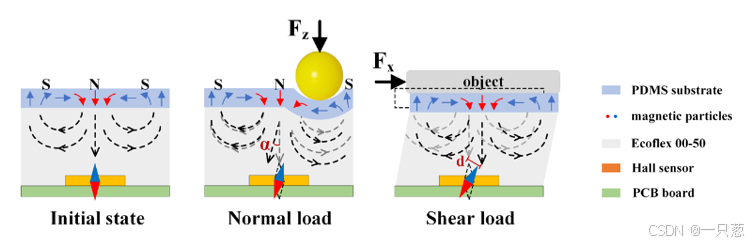
(图片来源:Yan, Youcan, et al. "Soft magnetic skin for super-resolution tactile sensing with force self-decoupling." Science Robotics 6.51 (2021): eabc8801.)
该工作在PDMS中嵌入磁性颗粒并呈现‘SNS’的排列形式,由于按压或者剪切力等能够对PDMS产生变形,导致由磁性颗粒产生的磁场发生变化,这种变化被底部的霍尔元件所感应,产生不同的信号。
具体详细资料可参考:Yan, Youcan, et al. "Soft magnetic skin for super-resolution tactile sensing with force self-decoupling." Science Robotics 6.51 (2021): eabc8801.
变阻式
变阻式的传感形式多样,如光敏、温敏、力敏等。不过他们的最终表现都是电阻的变化。这里我们主要介绍力敏的变阻式传感器。
力敏式的传感器种类比较多,笔者这里就拿个别进行介绍:
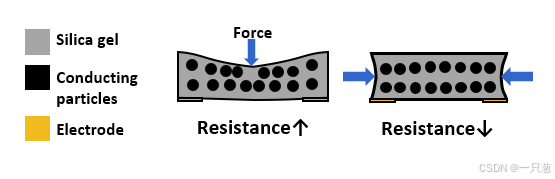
如上图所示为一种柔性变阻式传感,它的制作非常简单,主要是在硅胶等一些高分子聚合物中参入了导电粒子(碳纳米管、银粉等),经过充分搅拌后固化所得。当施加向下的压力时,受力部分内部的导电粒子被挤开,导致导电通路的减少,因此电阻增加;
同理,当施加力压缩传感器时,内部导电粒子之间的间隙被减小或相互接触的更多,因此电阻减小。
另外的还有在海绵中附着导电碳纳米管变阻式传感,如下图所示:
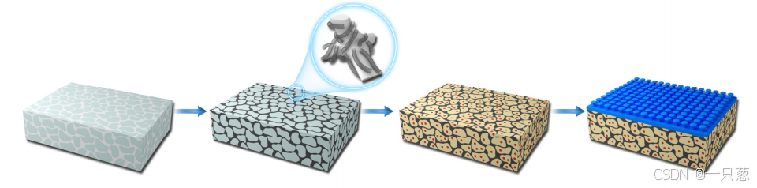
(图片来源:Wang, Duorui, et al. "Sensing-triggered stiffness-tunable smart adhesives." Science Advances 9.11 (2023): eadf4051.)
由于导电碳纳米管附着于海绵骨架上,因此,当海绵受力变形时,附着的导电碳纳米管相互接触或分离、拉长或收缩,都将导致电阻的改变。
除上述以外,还有的使用溶液的导电特性或制成织物的形式来发挥变阻式传感的作用,具体可参考:Kim, Taekyoung, et al. "Heterogeneous sensing in a multifunctional soft sensor for human-robot interfaces." Science robotics 5.49 (2020): eabc6878.
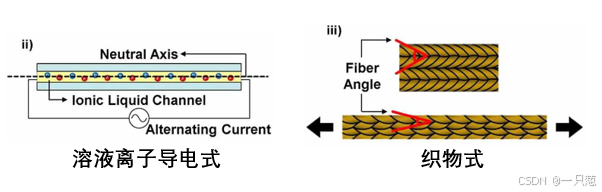
(图片来源:Kim, Taekyoung, et al. "Heterogeneous sensing in a multifunctional soft sensor for human-robot interfaces." Science robotics 5.49 (2020): eabc6878.)
电容式
电容式的传感想必大家都不陌生,这里简单介绍一下。电容传感主要由电容的特性来实现,如电容两极板间的距离、重合面积等都将影响电容极板间的电荷情况。根据这些原理,我们可以通过电荷转移情况判断受力等,并且对电容极板进行不同的布置能够实现剪切力等的感知。
光导式
当存在一个光源和一个接收器时,通过改变光导路径参数以实现光的强弱变化,接收器接收到的不同强度光可以判断路径中存在的干扰或者相应变化。如下图是一种用法;
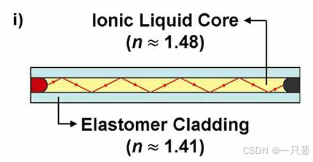
(图片来源:Kim, Taekyoung, et al. "Heterogeneous sensing in a multifunctional soft sensor for human-robot interfaces." Science robotics 5.49 (2020): eabc6878.)
最后,笔者知识匮乏,只能介绍这么多,如有不妥,欢迎评论修正!谢谢!

















 1357
1357

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









