







 文章介绍了如何利用遗传算法和A*算法进行停车场路径规划,通过A*算法获取初始路径,然后遗传算法进行优化,确保路径避开障碍物并寻找全局最优解。
文章介绍了如何利用遗传算法和A*算法进行停车场路径规划,通过A*算法获取初始路径,然后遗传算法进行优化,确保路径避开障碍物并寻找全局最优解。
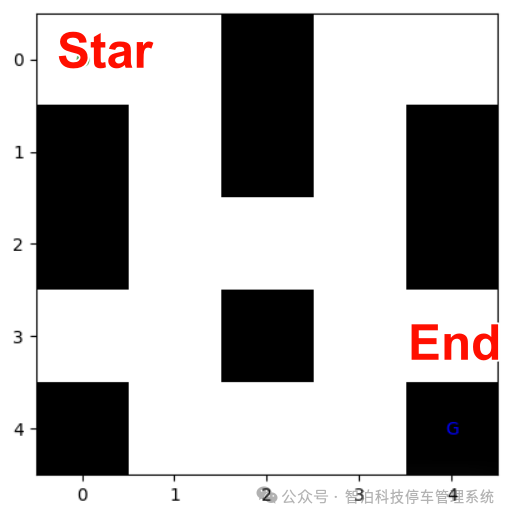
在进行路径规划的过程中遗传算法和A*算法均有不同的出色表现。在这里采用两者相结合的方法进行停车场的路径规划为我们找到停车位置。我们首先对于模型进行假设。假设在一个5*5的小模型中进行路径规划,由下图的(0,0)开始到下图的(3,4)为我们的起始点和到达点,图中黑色部分为有车辆位置或者障碍物。
初始化代码如下
import numpy as npimport matplotlib.pyplot as pltfrom queue import PriorityQueue# 定义地图,0表示可通过区域,1表示障碍物grid_map = np.array([[0, 0, 1, 0, 0],[1, 0, 1, 0, 1],[1, 0, 0, 0, 1],[0, 0, 1, 0, 0],[1, 0, 0, 0, 1]])# 定义起点和终点坐标start = (0, 0)goal = (3, 4)# 遗传算法参数population_size = 20num_generations = 100mutation_rate = 0.2
接下来我们通过A*算法找到初始路径,然后使用遗传算法进行路径的优化。在遗传算法中,路径被表示为一系列坐标点,通过交叉和变异操作生成新的路径,并通过适应度函数评估路径的质量。为了确保路径通过格子的中央位置,变异操作会将路径点设置为相邻两点的中点。
主要步骤和思路:
1.A*算法路径规划: 使用A*算法,一个经典的图搜索算法,找到从起点到终点的初始路径。
2.遗传算法初始化: 将A*算法得到的初始路径作为种群的初始个体,生成一个初始种群。
3.适应度评估: 设计适应度函数,评估每个个体的路径质量。在这个例子中,适应度函数考虑了路径的长度,并且确保路径不穿越障碍物。
4.交叉和变异操作: 通过选择适应度较高的个体进行交叉操作,生成新的子代。同时,进行变异操作以引入新的个体。
5.迭代优化: 重复进行交叉、变异和适应度评估的步骤,逐步优化种群中的个体。
6.最优解提取: 在迭代完成后,从优化后的种群中提取适应度最高的个体作为最终的路径解。
# A*算法进行路径规划def astar(grid, start, goal):rows, cols = grid.shapeopen_set = PriorityQueue()open_set.put((0, start))came_from = {}cost_so_far = {start: 0}while not open_set.empty():current_cost, current = open_set.get()if current == goal:breakfor neighbor in neighbors(current, grid):new_cost = cost_so_far[current] + 1 # 假设每个格子的代价是1if neighbor not in cost_so_far or new_cost < cost_so_far[neighbor]:cost_so_far[neighbor] = new_costpriority = new_cost + heuristic(goal, neighbor)open_set.put((priority, neighbor))came_from[neighbor] = current# 从终点回溯找到路径path = []current = goalwhile current in came_from:path.insert(0, current)current = came_from[current]path.insert(0, start)return path# 评估函数,计算适应度def evaluate(path, grid_map):for position in path:if grid_map[position[0]][position[1]] == 1: # 如果路径经过障碍物return 0 # 适应度为零return 1 / len(path) # 适应度为路径长度的倒数# 生成初始种群def generate_population(population_size, path):population = []for _ in range(population_size):mutated_path = mutate_path(path)population.append(mutated_path)return population# 变异操作def mutate_path(path):mutated_path = path.copy()for i in range(1, len(path) - 1):# 将路径点固定在格子中央mutated_path[i] = (int(np.floor((path[i][0] + path[i + 1][0]) / 2)),int(np.floor((path[i][1] + path[i + 1][1]) / 2)))return mutated_path# 交叉操作def crossover(parent1, parent2):crossover_point = np.random.randint(1, len(parent1) - 1)child1 = parent1[:crossover_point] + parent2[crossover_point:]child2 = parent2[:crossover_point] + parent1[crossover_point:]return child1, child2
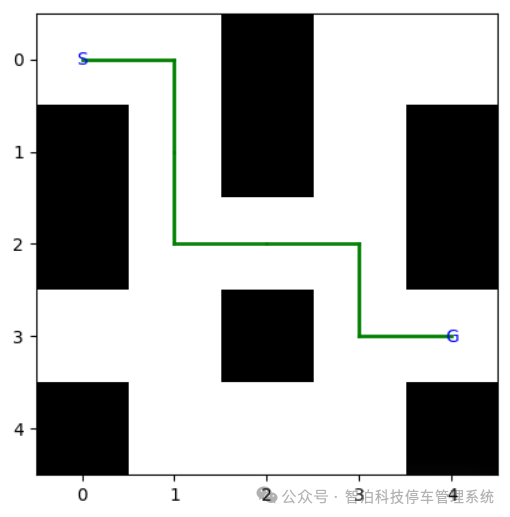
通过可视化操作可以得出路径规划。
# 可视化地图和路径def visualize_map_and_path(grid, path):fig, ax = plt.subplots()# 绘制地图ax.imshow(grid, cmap='Greys', interpolation='nearest')# 标记起点和终点ax.text(start[1], start[0], 'S', color='blue', ha='center', va='center')ax.text(goal[1], goal[0], 'G', color='blue', ha='center', va='center')# 标记路径for i in range(len(path) - 1):current = path[i]next_node = path[i + 1]ax.plot([current[1], next_node[1]], [current[0], next_node[0]], color='green', linewidth=2)plt.show()# 使用A*算法初始化路径initial_path = astar(grid_map, start, goal)# 使用遗传算法优化路径optimized_path = genetic_algorithm(population_size, num_generations, mutation_rate, grid_map, start, goal)# 可视化地图和初始路径visualize_map_and_path(grid_map, initial_path)# 可视化地图和优化后的路径visualize_map_and_path(grid_map, optimized_path)
最终结果展示
使用A*算法和遗传算法好处如下:
1.全局优化能力: 遗传算法具有全局搜索的能力,能够在大范围内搜索潜在的优秀解,有助于找到更优的路径。
2.对复杂空间的适应性: 遗传算法对于复杂的搜索空间和多模态问题有较强的适应性,能够应对路径规划中可能的多个解的情况。
3.结合A*算法的启发式信息: 初始路径由A算法提供,通过遗传算法对其进行优化,结合了A算法的启发式信息和遗传算法的全局搜索特性。
4.可扩展性: 代码框架可以轻松扩展和修改,适应不同问题和场景。
5.障碍物避免: 通过适应度函数的设计,确保路径不会穿越障碍物,提高了路径的可行性。
需要注意的是,选择算法时应根据具体问题的性质和要求来决定。A*算法在路径规划等问题上表现出色,而遗传算法适用于更广泛的搜索和优化问题。在某些情况下,也可以考虑将两者结合使用,以发挥各自优势。

















 1404
1404

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









