






 本文介绍了如何在树莓派4B上使用OpenCV对摄像头图像进行处理,并通过串口与STM32F103C8T6通信,实现小车轨迹控制。详细步骤包括配置串口、调用OpenCV进行图像处理和轮廓检测,展示了从树莓派到下位机的完整通信过程。
本文介绍了如何在树莓派4B上使用OpenCV对摄像头图像进行处理,并通过串口与STM32F103C8T6通信,实现小车轨迹控制。详细步骤包括配置串口、调用OpenCV进行图像处理和轮廓检测,展示了从树莓派到下位机的完整通信过程。
一、所用材料
- 树莓派4B
- 树莓派官方摄像头
- STM32F103C8T6最小系统板
二、实现功能
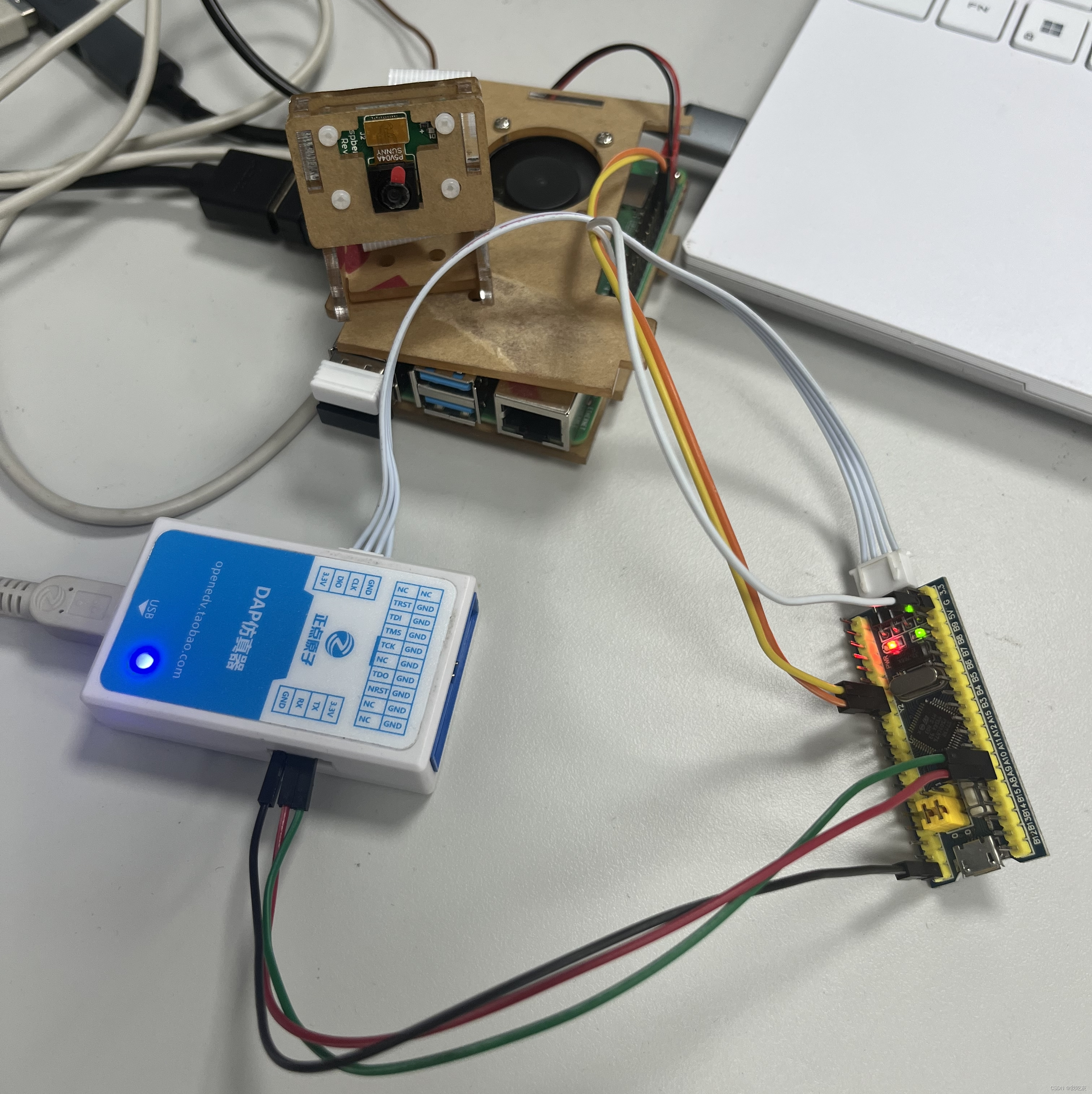
在树莓派上用OpenCV对摄像头中的图像进行处理,将图像处理后的数据通过串口通信给到下位机STM32F103C8T6,再由下位机给出控制信号,利用pid算法实现对小车运动轨迹的控制。硬件连接实物如下图所示。(本文章只讲述到树莓派与下位机之间通信的部分)
三、实现过程
3.1 树莓派
1、配置串口
可以参考 学习笔记一:树莓派与STM32的UART通信 这篇博客的第一章,里面详细讲述了如何改变串口的映射和mini串口调试助手的安装及使用。其中在我安装好minicom后,在终端输入 minicom -D /dev/ttyAMA0 后确实出现了提示没有权限的情况,这个时候需要现在终端输入 sudo chmod 777 /dev/ttyAMA0 再输入 minicom -D /dev/ttyAMA0 就可以正常打开miniocm了。
按照上面这篇博客的步骤,确保树莓派和电脑之间可以正常通信后再进行下一步操作。
2、调用OpenCV
在使用OpenCV前可以再确认一下树莓派的通信是否正常,可以试着运行下面的代码。 如果串口通正常,将会间接收到从1-100的数字。
import serial
import time
ser = serial.Serial('/dev/ttyAMA0',115200)
num = 1
while True:
ser.write(str(int(num)).encode() + '\r\n')
num += 1
if num > 100:
num = 1
time.sleep(0.2)在确定串口通信正常后,就可以用OpenCV来进行图像处理,在下面呈上我使用的代码。为了使对黑色的识别效果更好,我在代码中加入了高斯模糊来减小噪声,黑色的阈值选定的是60,大家也可以根据具体情况来适当改编代码。
import cv2
import numpy as np
import serial
import time
def main():
# 打开摄像头
cap = cv2.VideoCapture(0)
# 检查摄像头是否成功打开
if not cap.isOpened():
print("无法打开摄像头")
return
ser = serial.Serial('/dev/ttyAMA0',115200)
while True:
start_time = time.time()
# 读取当前帧
ret, frame = cap.read()
# 检查帧是否读取正确
if not ret:
print("???????")
break
# 将图片转到灰度值
gray = cv2.cvtColor(frame, cv2.COLOR_BGR2GRAY)
#高斯模糊
blurred = cv2.GaussianBlur(gray, (5, 5), 0)
# 设定黑色的阈值范围
_, threshold = cv2.threshold(blurred, 60, 255, cv2.THRESH_BINARY_INV)
# 寻找轮廓
kernel = np.ones((5, 5), np.uint8)
opening = cv2.morphologyEx(threshold, cv2.MORPH_OPEN, kernel)
_, contours, hierarchy = cv2.findContours(opening, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
# 绘制轮廓
centers = []
for contour in contours:
# 计算轮廓的边界值
x, y, w, h = cv2.boundingRect(contour)
if w * h > 100: # 只显示较大的轮廓
cv2.rectangle(frame, (x, y), (x+w, y+h), (255, 0, 0), 2)
center_x = x + w //2
centers.append(center_x)
#发送黑色域的水平中点坐标
if centers:
message =str(centers[0]).encode() + b'\n'
ser.write(message)
# 显示原始图像和结果图像
cv2.imshow('Frame', frame)
cv2.imshow('Threshold', threshold)
# 按q退出
if cv2.waitKey(1) & 0xFF == ord('q'):
break
time.sleep(max(0,0.05 - (time.time() - start_time)))
# 释放摄像头
cap.release()
# 关闭所有窗口
cv2.destroyAllWindows()
if __name__ == '__main__':
main()其中,在调用 cv2.findContours 函数时,可能会因为OpenCV版本的问题而导致返回值个数的不同,会出现 “ValueError: too many values to unpack (expected 2)” 的报错。如果在运行中出现了这个报错,可以将寻找轮廓的代码换成下面这段,这样就可以避免因版本不同而带来的问题。
# 寻找轮廓
try:
# OpenCV 4.x及一些3.x版本
contours, hierarchy = cv2.findContours(mask, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)
except ValueError:
# OpenCV 3.x的更早版本
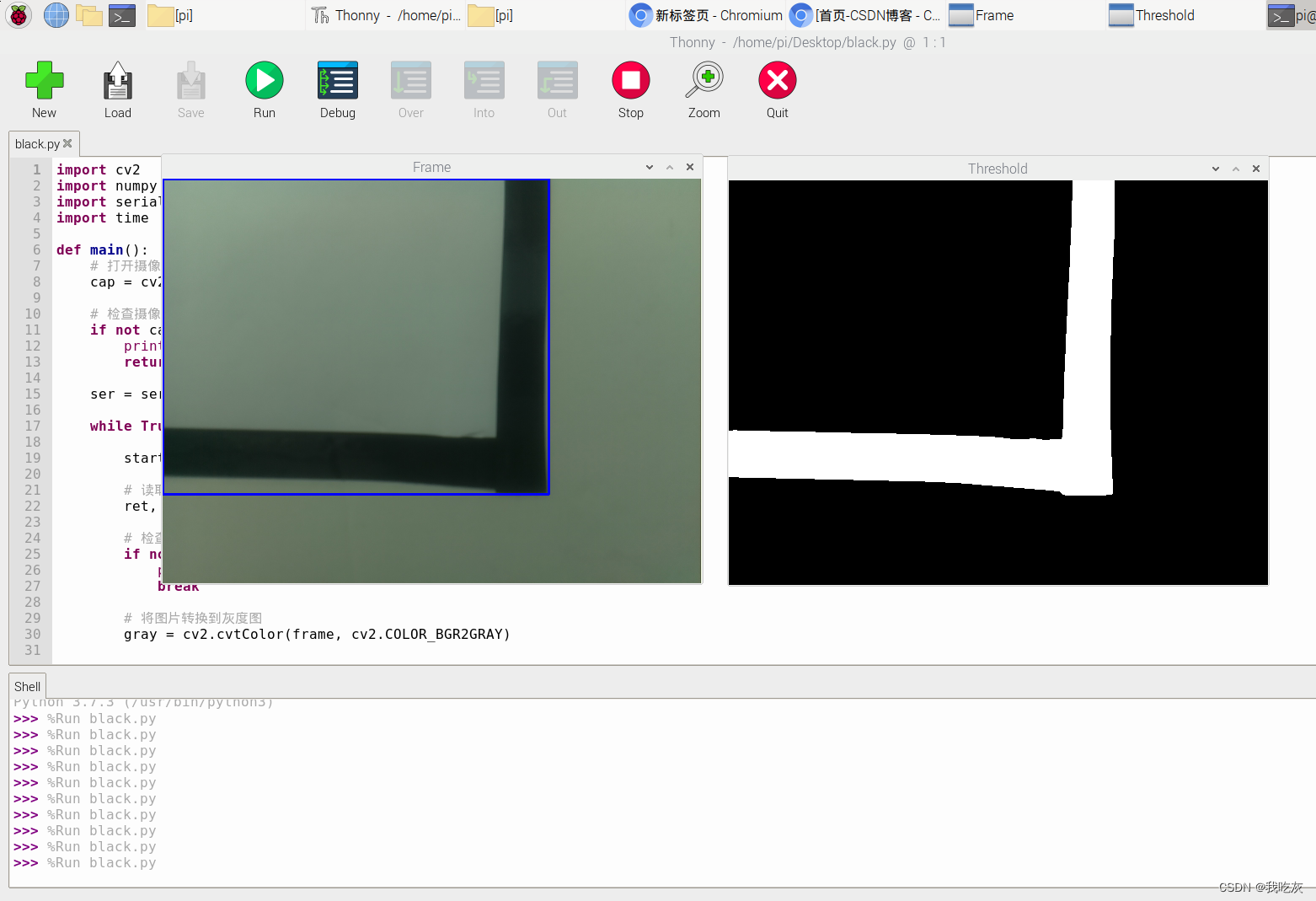
_, contours, hierarchy = cv2.findContours(mask, cv2.RETR_TREE, cv2.CHAIN_APPROX_SIMPLE)如果代码运行无误,那么你将会得到如下图所示的结果 ,总体来说识别效果还算不错,黑色区域的轮廓也还算清晰。同时,如果你可以在电脑串口助手上收到黑色区域的水平中点值,那么树莓派的配置工作到此为止就圆满结束了。
3.2 STM32
因为本博客不涉及到控制部分,所以下位机的配置就相对比较简单了,只需要简单的串口接收模块就可以,这里就简单带过,具体有问题的可以参考我的另一篇色块追踪的博客,里面有初始化配置和串口初始化的详细过程,虽然是F407ZGT6的,但是逻辑上和F103C8T6没有太大区别,在此附上连接【OpenMV+STM32】PID控制二维自由舵机色块追踪。
1、CubeMX
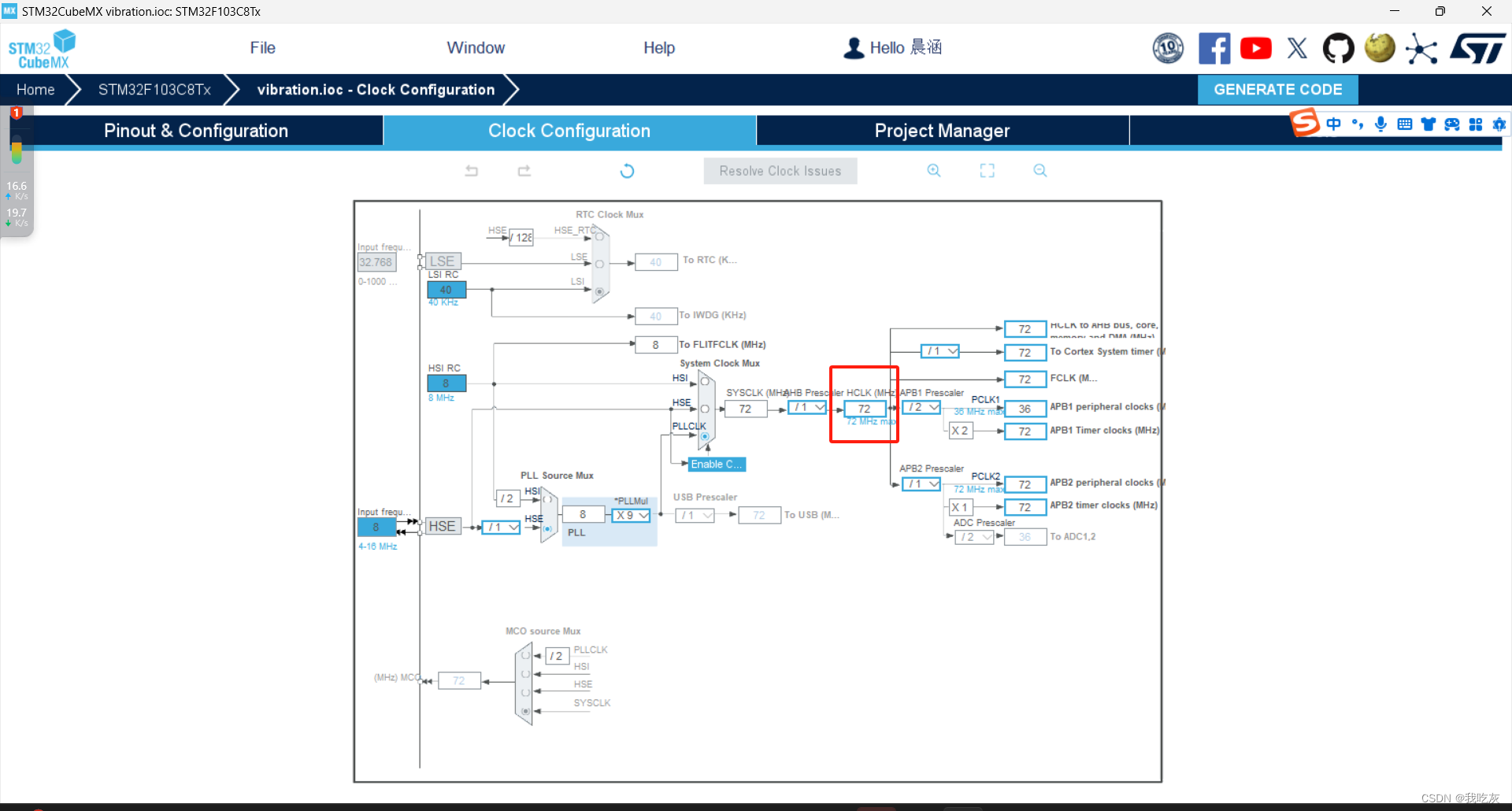
因为芯片不同,所以在时钟树的配置上与F4是不同的,具体数值可以看下图。
在串口的配置上需要将UART1和USART2都打开,UART1用于与树莓派通信,而UART2用于与电脑通信,便于中间过程的调参。(USART2配置同理)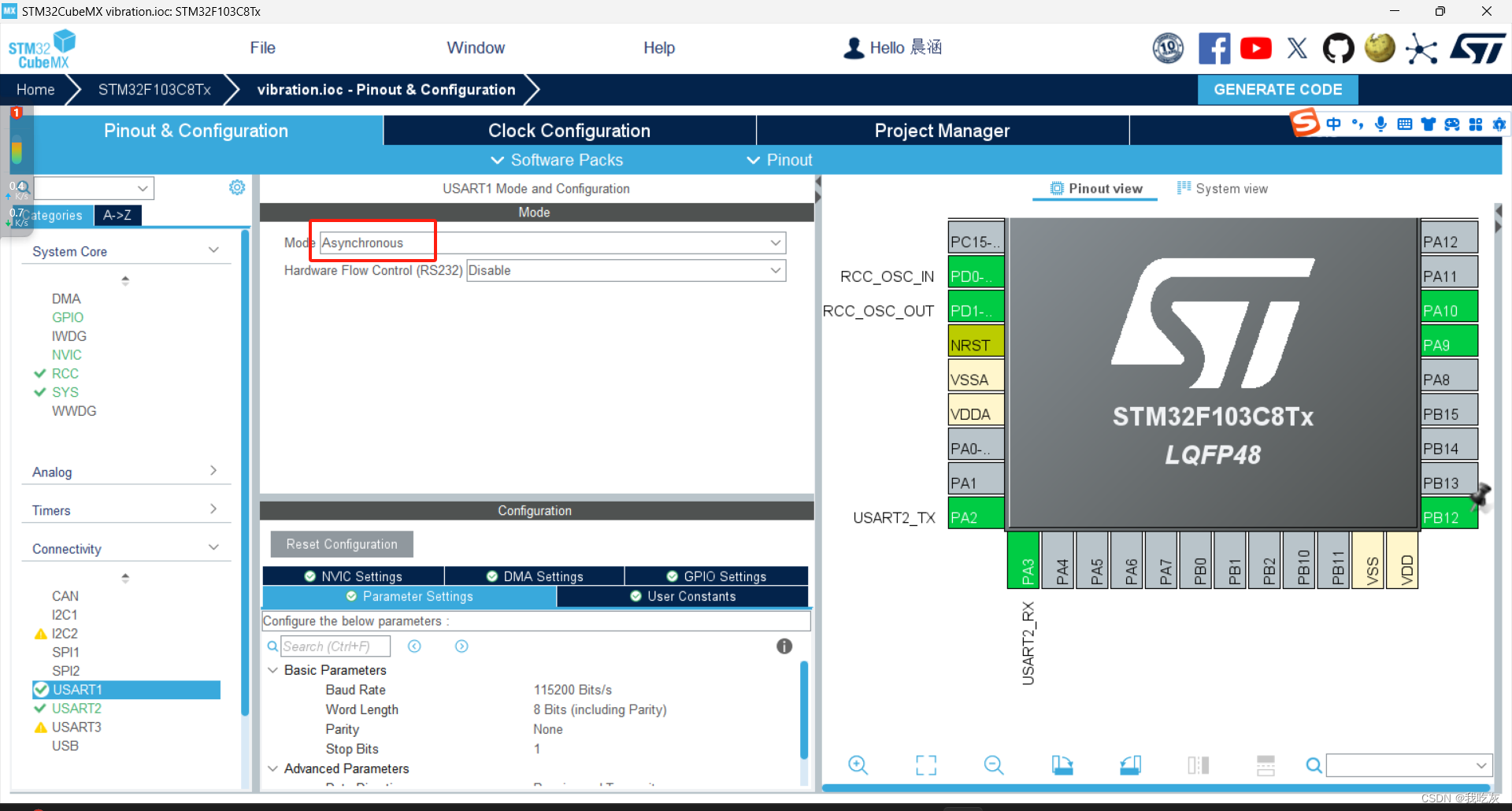
2、KEIL
①在usart.c的最后加上串口重定向代码。
int fputc(int ch, FILE *f)
{
HAL_UART_Transmit(&huart2, (uint8_t *)&ch, 1, 0xffff);
return ch;
}
int fgetc(FILE *f)
{
uint8_t ch = 0;
HAL_UART_Receive(&huart2, &ch, 1, 0xffff);
return ch;
}②在usart.h中加入库
#include <stdio.h>③在main.c中相应的地方加入串口初始配置
#include <string.h>
#define RxBuffer_MaxSize 256 //最大接收字节数
char RxBuffer[RxBuffer_MaxSize],rx_buf[RxBuffer_MaxSize]; //接收数据
uint8_t aRxBuffer; //接收中断缓冲
uint8_t Uart1_Rx_Cnt = 0; //接收缓冲计数
/* USER CODE BEGIN 2 */
HAL_UART_Receive_IT(&huart1, (uint8_t *)&aRxBuffer, 1);
/* USER CODE END 2 */④在main.c后加入串口回调函数
void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart)
{
UNUSED(huart);
if(huart == &huart1){
// HAL_GPIO_TogglePin(GPIOC, GPIO_PIN_13); // 有数据则翻转LED灯
RxBuffer[Uart1_Rx_Cnt++] = aRxBuffer;
if((RxBuffer[Uart1_Rx_Cnt-1] == '\n'))
{ // 检测到帧尾
RxBuffer[Uart1_Rx_Cnt-1] = '\0'; // 替换帧尾为字符串结束符
strcpy(rx_buf, &RxBuffer[0]); // 复制数据到rx_buf,跳过帧头
printf("%s\r\n", rx_buf);
Uart1_Rx_Cnt = 0; // 重置计数器
memset(RxBuffer, 0, sizeof(RxBuffer)); // 清空接收缓冲区
}
HAL_UART_Receive_IT(&huart1, (uint8_t *)&aRxBuffer, 1);
}
}由于在树莓派的串口发送中并没有设置帧头,并将帧尾设置成了'\n',所以串口接收的代码相对较简单。如果代码运行无误,且单片机与电脑间的通信顺利,则电脑端也将会收到黑色区域的水平中点值,正如如视频中所示。
黑色域水平中点值传输
四、结语
本博客只是智能巡线小车中视觉的一部分,后续如果时间允许的话会将整个巡线的功能都写下来,同时之后如果有更好的图像处理代码我也会同步在此篇博客中修改。大家如果在配置过程中遇到什么问题或者发现此博客有任何问题,欢迎私信我或者直接在评论里留言。另外,如果大家现在就对控制模块感兴趣的话,不妨去看下我同实验室队友‘南极熊ii’的博客,他写过一些关于驱动电机的内容,在此附上链接。


















 547
547

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









